
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Kuva 3 Sylinterirobotin toimintamalli<br />
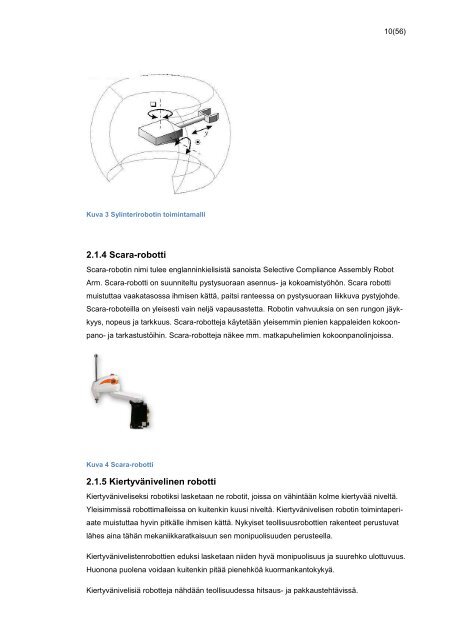
2.1.4 Scara-robotti<br />
Scara-robotin nimi tulee englanninkielisistä sanoista Selective Compliance Assembly Robot<br />
Arm. Scara-robotti on suunniteltu pystysuoraan asennus- ja kokoamistyöhön. Scara robotti<br />
10(56)<br />
muistuttaa vaakatasossa ihmisen kättä, paitsi ranteessa on pystysuoraan liikkuva pystyjohde.<br />
Scara-roboteilla on yleisesti vain neljä vapausastetta. Robotin vahvuuksia on sen rungon jäyk-<br />
kyys, nopeus ja tarkkuus. Scara-robotteja käytetään yleisemmin pienien kappaleiden kokoon-<br />
pano- ja tarkastustöihin. Scara-robotteja näkee mm. matkapuhelimien kokoonpanolinjoissa.<br />
Kuva 4 Scara-robotti<br />
2.1.5 Kiertyvänivelinen robotti<br />
Kiertyväniveliseksi robotiksi lasketaan ne robotit, joissa on vähintään kolme kiertyvää niveltä.<br />
Yleisimmissä robottimalleissa on kuitenkin kuusi niveltä. Kiertyvänivelisen robotin toimintaperi-<br />
aate muistuttaa hyvin pitkälle ihmisen kättä. Nykyiset teollisuusrobottien rakenteet perustuvat<br />
lähes aina tähän mekaniikkaratkaisuun sen monipuolisuuden perusteella.<br />
Kiertyvänivelistenrobottien eduksi lasketaan niiden hyvä monipuolisuus ja suurehko ulottuvuus.<br />
Huonona puolena voidaan kuitenkin pitää pienehköä kuormankantokykyä.<br />
Kiertyvänivelisiä robotteja nähdään teollisuudessa hitsaus- ja pakkaustehtävissä.