
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
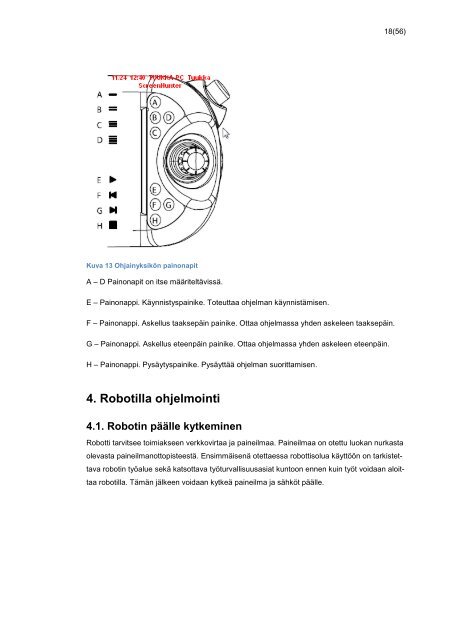
Kuva 13 Ohjainyksikön painonapit<br />
A – D Painonapit on itse määriteltävissä.<br />
E – Painonappi. Käynnistyspainike. Toteuttaa ohjelman käynnistämisen.<br />
F – Painonappi. Askellus taaksepäin painike. Ottaa ohjelmassa yhden askeleen taaksepäin.<br />
G – Painonappi. Askellus eteenpäin painike. Ottaa ohjelmassa yhden askeleen eteenpäin.<br />
H – Painonappi. Pysäytyspainike. Pysäyttää ohjelman suorittamisen.<br />
4. Robotilla ohjelmointi<br />
4.1. Robotin päälle kytkeminen<br />
18(56)<br />
Robotti tarvitsee toimiakseen verkkovirtaa ja paineilmaa. Paineilmaa on otettu luokan nurkasta<br />
olevasta paineilmanottopisteestä. Ensimmäisenä otettaessa robottisolua käyttöön on tarkistet-<br />
tava robotin työalue sekä katsottava työturvallisuusasiat kuntoon ennen kuin työt voidaan aloit-<br />
taa robotilla. Tämän jälkeen voidaan kytkeä paineilma ja sähköt päälle.