
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
IF Toteuttaa jakson erilaisia käskyjä riippumatta onko tilat päällä.<br />
MoveC Työkalupiste liikkuu ympyrämuotoisesti. On robotin perusliikekäsky.<br />
MoveL Työkalupiste liikkuu lineaarisesti. On robotin perusliikekäsky.<br />
Reset Resetoi digitaalisen ulostulon signaalin nollaan.<br />
Set Asettaa digitaalisen ulostulon signaalin ykköseksi<br />
Wait DI Odottaa kunnes digitaalinen input on asettunut<br />
WaitTime Odottaa ohjelmoijan asettaman ajan tai odottaa robotin pysähtymistä<br />
WHILE Toistaa jaksoa kunnes tila on vaihtunut.<br />
WaitDo Odottaa kunnes digitaalinen output on asettunut<br />
WaitUnit Odottaa kunnes tila on asettunut päälle.<br />
5.1. Käskyjen lisääminen<br />
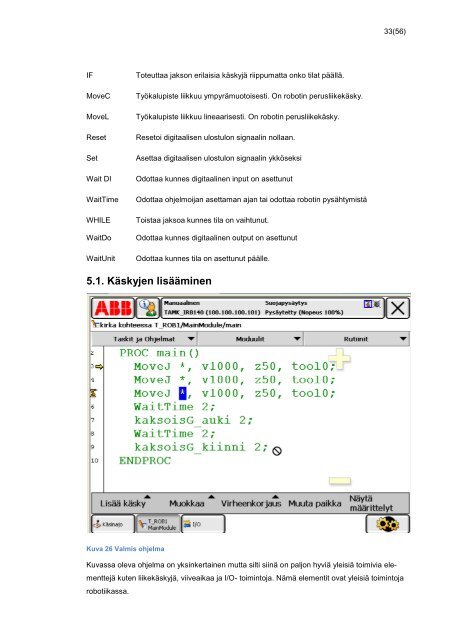
Kuva 26 Valmis ohjelma<br />
Kuvassa oleva ohjelma on yksinkertainen mutta silti siinä on paljon hyviä yleisiä toimivia ele-<br />
33(56)<br />
menttejä kuten liikekäskyjä, viiveaikaa ja I/O- toimintoja. Nämä elementit ovat yleisiä toimintoja<br />
robotiikassa.