

Capitolo 9 Il sistema satellitare ARGOS 9.0 ... - Sezione Navigazione
Capitolo 9 Il sistema satellitare ARGOS 9.0 ... - Sezione Navigazione
Capitolo 9 Il sistema satellitare ARGOS 9.0 ... - Sezione Navigazione

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
n<br />
2 ⎡<br />
IC = AX − F = ⎢∑<br />
⎣ i=<br />
424<br />
1<br />
i i 2 ⎤<br />
( Fr<br />
− Ft<br />
) ( n − 3 ) ⎥⎦<br />
MARIO VULTAGGIO<br />
dove IC rappresenta la consistenza dell’errore residuo.<br />
<strong>Il</strong> processo iterativo termina quando l’errore residuo non cambia in<br />
modo significativo tra due successive iterazioni.<br />
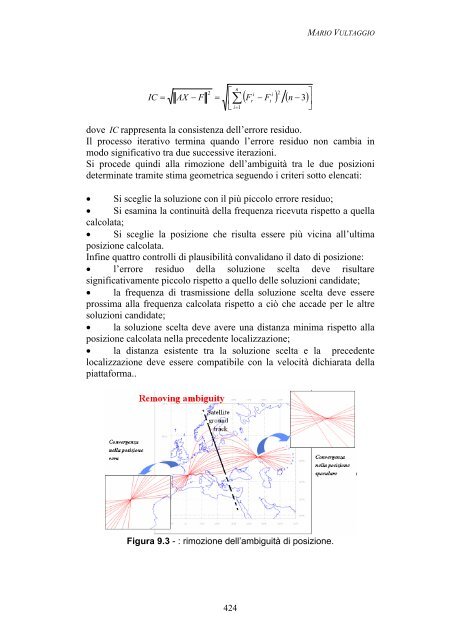
Si procede quindi alla rimozione dell’ambiguità tra le due posizioni<br />
determinate tramite stima geometrica seguendo i criteri sotto elencati:<br />
• Si sceglie la soluzione con il più piccolo errore residuo;<br />
• Si esamina la continuità della frequenza ricevuta rispetto a quella<br />
calcolata;<br />
• Si sceglie la posizione che risulta essere più vicina all’ultima<br />
posizione calcolata.<br />
Infine quattro controlli di plausibilità convalidano il dato di posizione:<br />
• l’errore residuo della soluzione scelta deve risultare<br />
significativamente piccolo rispetto a quello delle soluzioni candidate;<br />
• la frequenza di trasmissione della soluzione scelta deve essere<br />
prossima alla frequenza calcolata rispetto a ciò che accade per le altre<br />
soluzioni candidate;<br />
• la soluzione scelta deve avere una distanza minima rispetto alla<br />
posizione calcolata nella precedente localizzazione;<br />
• la distanza esistente tra la soluzione scelta e la precedente<br />
localizzazione deve essere compatibile con la velocità dichiarata della<br />
piattaforma..<br />
Figura 9.3 - : rimozione dell’ambiguità di posizione.














