

Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
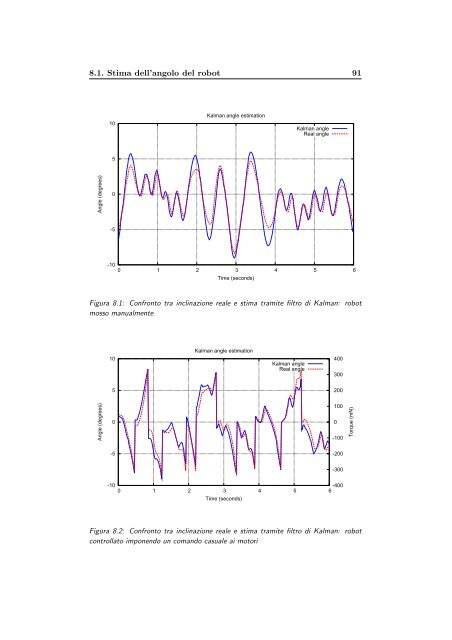
8.1. Stima dell’angolo del robot 9110Kalman angle estimationKalman angleReal angle5Angle (degrees)0-5-100 1 2 3 4 5 6Time (seconds)Figura 8.1: Confronto tra inclinazione reale e stima tramite filtro <strong>di</strong> Kalman: robotmosso manualmente10Kalman angle estimationKalman angleReal angle4003005200Angle (degrees)01000-100Torque (mN)-5-200-300-10-4000 1 2 3 4 5 6Time (seconds)Figura 8.2: Confronto tra inclinazione reale e stima tramite filtro <strong>di</strong> Kalman: robotcontrollato imponendo un comando ca<strong>su</strong>ale ai motori






