- Page 1:
POLITECNICO DI MILANOCorso di Laure
- Page 5:
RingraziamentiRingrazio innanzitutt
- Page 8 and 9:
4.1 Telaio . . . . . . . . . . . .
- Page 10 and 11:
8.4 Bilanciamento con controllore L
- Page 12 and 13:
2 Capitolo 1. IntroduzioneLa fase p
- Page 14 and 15:
4 Capitolo 1. Introduzione
- Page 16 and 17:
6 Capitolo 2. Stato dell’arte(a)(
- Page 18 and 19:
8 Capitolo 2. Stato dell’arte(a)(
- Page 20 and 21:
10 Capitolo 2. Stato dell’artenel
- Page 22 and 23:
12 Capitolo 3. Studio teorico del p
- Page 25 and 26:
3.1. Modello del robot 15La prima g
- Page 27 and 28:
3.1. Modello del robot 17L’energi
- Page 29 and 30:
3.1. Modello del robot 193.1.3 Simu
- Page 31 and 32:
3.2. Stima dell’inclinazione del
- Page 33 and 34:
3.2. Stima dell’inclinazione del
- Page 35 and 36:
3.2. Stima dell’inclinazione del
- Page 37 and 38:
Capitolo 4Progetto meccanico“Bend
- Page 39 and 40:
4.1. Telaio 29Figura 4.2: Progetto
- Page 41 and 42:
4.2. Ruote e trasmissione 31Figura
- Page 43 and 44:
4.3. Attuatori 33Figura 4.6: Cerchi
- Page 45 and 46:
4.3. Attuatori 3510Angle / Torque p
- Page 47 and 48:
Capitolo 5Progetto elettronico“Il
- Page 49 and 50:
5.1. Sensori 395.1 SensoriA bordo d
- Page 51 and 52:
5.1. Sensori 41Figura 5.3: Diagramm
- Page 53 and 54:
5.2. Condizionamento dei segnali an
- Page 55 and 56:
5.3. Elettronica di potenza 45Per r
- Page 57 and 58:
5.3. Elettronica di potenza 47Per p
- Page 59 and 60:
5.3. Elettronica di potenza 49In qu
- Page 61 and 62: 5.3. Elettronica di potenza 51(a)(b
- Page 63 and 64: 5.3. Elettronica di potenza 53quind
- Page 65 and 66: 5.3. Elettronica di potenza 55Tabel
- Page 67 and 68: 5.4. Logica e microcontrollore 57te
- Page 69 and 70: 5.5. Comunicazioni 59Il microcontro
- Page 71 and 72: Capitolo 6Software“Credo che alla
- Page 73 and 74: 6.1. Architettura 63PID utilizzato
- Page 75 and 76: 6.2. Acquisizione dei segnali 65Per
- Page 77 and 78: 6.3. Controllo dei motori 67si rile
- Page 79 and 80: 6.5. Algoritmi di controllo 69imple
- Page 81 and 82: Capitolo 7Controllo“La vita è co
- Page 83 and 84: 7.1. Controllore PID 73(a) K P vari
- Page 85 and 86: 7.1. Controllore PID 75Tabella 7.1:
- Page 87 and 88: 7.2. Controllore LQR 77Un generico
- Page 89 and 90: 7.3. Controllo basato su apprendime
- Page 91 and 92: 7.3. Controllo basato su apprendime
- Page 93 and 94: 7.3. Controllo basato su apprendime
- Page 95 and 96: 7.3. Controllo basato su apprendime
- Page 97 and 98: 7.3. Controllo basato su apprendime
- Page 99 and 100: Capitolo 8Realizzazioni sperimental
- Page 101 and 102: 8.1. Stima dell’angolo del robot
- Page 103 and 104: 8.2. Ritardo dei segnali e test di
- Page 105 and 106: 8.2. Ritardo dei segnali e test di
- Page 107 and 108: 8.3. Bilanciamento con controllore
- Page 109 and 110: 8.4. Bilanciamento con controllore
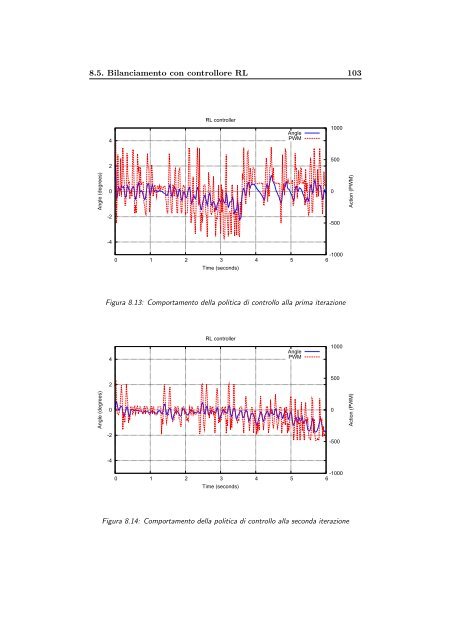
- Page 111: 8.5. Bilanciamento con controllore
- Page 115 and 116: Capitolo 9Conclusioni e sviluppi fu
- Page 117 and 118: 9.2. Sviluppi futuri 107tamento del
- Page 119 and 120: Bibliografia[1] T McGeer. Passive d
- Page 121: BIBLIOGRAFIA 111[23] Pierre Geurts,