

Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
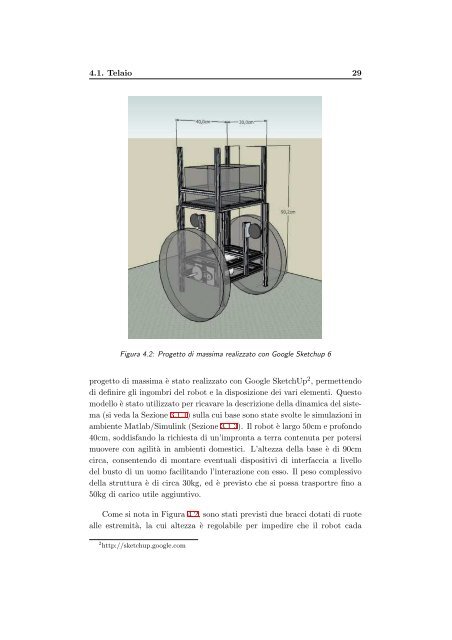
4.1. Telaio 29Figura 4.2: Progetto <strong>di</strong> massima realizzato con Google Sketchup 6progetto <strong>di</strong> massima è stato realizzato con Google SketchUp 2 , permettendo<strong>di</strong> definire gli ingombri del robot e la <strong>di</strong>sposizione dei vari elementi. Questomodello è stato utilizzato per ricavare la descrizione della <strong>di</strong>namica del sistema(si veda la Sezione 3.1.1) <strong>su</strong>lla cui <strong>base</strong> sono state svolte le simulazioni inambiente Matlab/Simulink (Sezione 3.1.3). Il robot è largo 50cm e profondo40cm, sod<strong>di</strong>sfando la richiesta <strong>di</strong> un’impronta a terra contenuta per potersimuovere con agilità in ambienti domestici. L’altezza della <strong>base</strong> è <strong>di</strong> 90cmcirca, consentendo <strong>di</strong> montare eventuali <strong>di</strong>spositivi <strong>di</strong> interfaccia a livellodel busto <strong>di</strong> un uomo facilitando l’interazione con esso. Il peso complessivodella struttura è <strong>di</strong> circa 30kg, ed è previsto che si possa trasportre fino a50kg <strong>di</strong> carico utile aggiuntivo.Come si nota in Figura 4.2, sono stati previsti due bracci dotati <strong>di</strong> ruotealle estremità, la cui altezza è regolabile per impe<strong>di</strong>re che il robot cada2 http://sketchup.google.com






