

Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
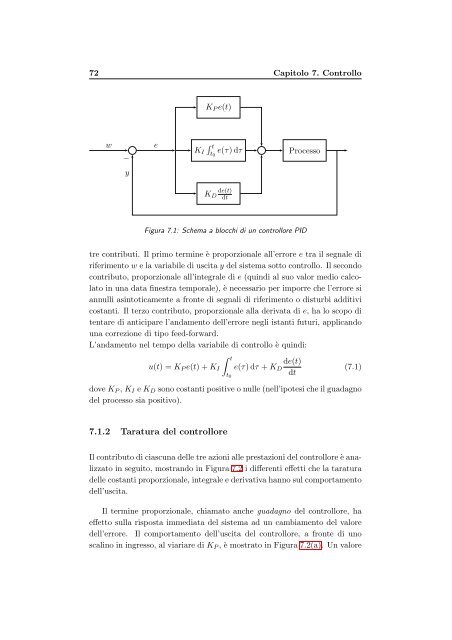
72 Capitolo 7. ControlloK P e(t)w−eK I∫ tt 0e(τ)dτProcessoyK Dde(t)dtFigura 7.1: Schema a blocchi <strong>di</strong> un controllore PIDtre contributi. Il primo termine è proporzionale all’errore e tra il segnale <strong>di</strong>riferimento w e la variabile <strong>di</strong> uscita y del sistema sotto controllo. Il secondocontributo, proporzionale all’integrale <strong>di</strong> e (quin<strong>di</strong> al <strong>su</strong>o valor me<strong>di</strong>o calcolatoin <strong>una</strong> data finestra temporale), è necessario per imporre che l’errore siannulli asintoticamente a fronte <strong>di</strong> segnali <strong>di</strong> riferimento o <strong>di</strong>sturbi ad<strong>di</strong>tivicostanti. Il terzo contributo, proporzionale alla derivata <strong>di</strong> e, ha lo scopo <strong>di</strong>tentare <strong>di</strong> anticipare l’andamento dell’errore negli istanti futuri, applicando<strong>una</strong> correzione <strong>di</strong> tipo feed-forward.L’andamento nel tempo della variabile <strong>di</strong> controllo è quin<strong>di</strong>:u(t) = K P e(t) + K I∫ tde(t)e(τ)dτ + K Dt 0dt(7.1)dove K P , K I e K D sono costanti positive o nulle (nell’ipotesi che il guadagnodel processo sia positivo).7.1.2 Taratura del controlloreIl contributo <strong>di</strong> ciasc<strong>una</strong> delle tre azioni alle prestazioni del controllore è analizzatoin seguito, mostrando in Figura 7.2 i <strong>di</strong>fferenti effetti che la taraturadelle costanti proporzionale, integrale e derivativa hanno <strong>su</strong>l comportamentodell’uscita.Il termine proporzionale, chiamato anche guadagno del controllore, haeffetto <strong>su</strong>lla risposta imme<strong>di</strong>ata del sistema ad un cambiamento del valoredell’errore. Il comportamento dell’uscita del controllore, a fronte <strong>di</strong> unoscalino in ingresso, al viariare <strong>di</strong> K P , è mostrato in Figura 7.2(a). Un valore






