

Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...
Progettazione e realizzazione di una base robotica bilanciante su ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
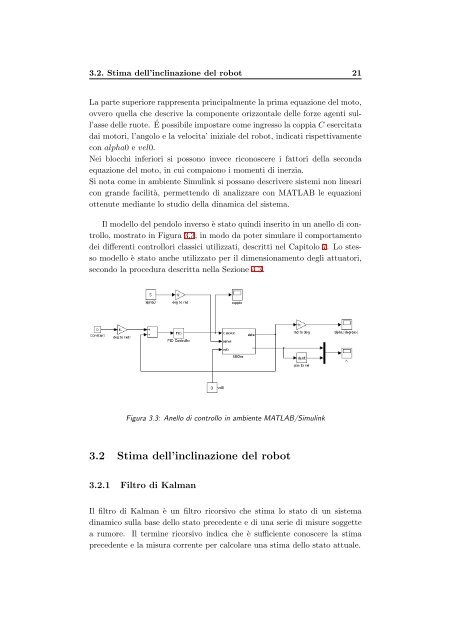
3.2. Stima dell’inclinazione del robot 21La parte <strong>su</strong>periore rappresenta principalmente la prima equazione del moto,ovvero quella che descrive la componente orizzontale delle forze agenti <strong>su</strong>ll’assedelle ruote. É possibile impostare come ingresso la coppia C esercitatadai motori, l’angolo e la velocita’ iniziale del robot, in<strong>di</strong>cati rispettivamentecon alpha0 e vel0.Nei blocchi inferiori si possono invece riconoscere i fattori della secondaequazione del moto, in cui compaiono i momenti <strong>di</strong> inerzia.Si nota come in ambiente Simulink si possano descrivere sistemi non linearicon grande facilità, permettendo <strong>di</strong> analizzare con MATLAB le equazioniottenute me<strong>di</strong>ante lo stu<strong>di</strong>o della <strong>di</strong>namica del sistema.Il modello del pendolo inverso è stato quin<strong>di</strong> inserito in un anello <strong>di</strong> controllo,mostrato in Figura 3.3, in modo da poter simulare il comportamentodei <strong>di</strong>fferenti controllori classici utilizzati, descritti nel Capitolo 7. Lo stessomodello è stato anche utilizzato per il <strong>di</strong>mensionamento degli attuatori,secondo la procedura descritta nella Sezione 4.3.Figura 3.3: Anello <strong>di</strong> controllo in ambiente MATLAB/Simulink3.2 Stima dell’inclinazione del robot3.2.1 Filtro <strong>di</strong> KalmanIl filtro <strong>di</strong> Kalman è un filtro ricorsivo che stima lo stato <strong>di</strong> un sistema<strong>di</strong>namico <strong>su</strong>lla <strong>base</strong> dello stato precedente e <strong>di</strong> <strong>una</strong> serie <strong>di</strong> mi<strong>su</strong>re soggettea rumore. Il termine ricorsivo in<strong>di</strong>ca che è <strong>su</strong>fficiente conoscere la stimaprecedente e la mi<strong>su</strong>ra corrente per calcolare <strong>una</strong> stima dello stato attuale.






