Part III - IPA SA
Part III - IPA SA
Part III - IPA SA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
REVISTA ROMÂN DE AUTOMATIC<br />
85<br />
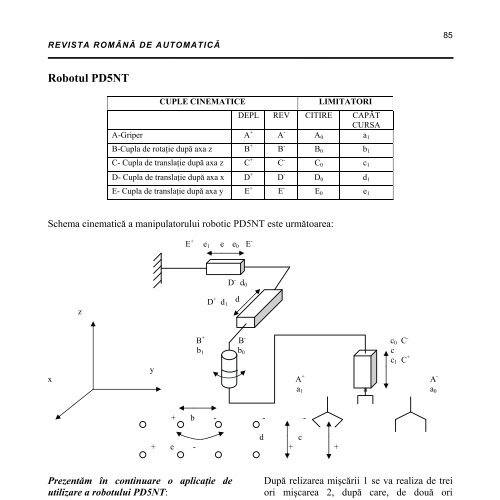
Robotul PD5NT<br />
CUPLE CINEMATICE<br />
LIMITATORI<br />
DEPL REV CITIRE CAPT<br />
CUR<strong>SA</strong><br />
A-Griper A + A - A 0 a 1<br />
B-Cupla de rotaie dup axa z B + B - B 0 b 1<br />
C- Cupla de translaie dup axa z C + C - C 0 c 1<br />
D- Cupla de translaie dup axa x D + D - D 0 d 1<br />
E- Cupla de translaie dup axa y E + E - E 0 e 1<br />
Schema cinematic a manipulatorului robotic PD5NT este urmtoarea:<br />
E + e 1 e e 0 E -<br />
D - d 0<br />
z<br />
D + d 1<br />
d<br />
B + B - c 0 C -<br />
b 1 b 0 c<br />
c 1 C +<br />
y<br />
x A + A -<br />
a 1 a a 0<br />
+ b - - -<br />
d c<br />
+ e - + +<br />
Prezentm în continuare o aplicaie de<br />
utilizare a robotului PD5NT:<br />
Manipulatorul robotic trebuie s realizeze<br />
secvena 1 de micare. Apoi, în funcie de<br />
decizia extern x, va realiza fie micarea 2,<br />
fie micarea 3.<br />
2 sau<br />
1<br />
3<br />
Dup relizarea micrii 1 se va realiza de trei<br />
ori micarea 2, dup care, de dou ori<br />
micarea 3. Dup executarea micrii 3 se va<br />
implementa o temporizare de 2 secunde.<br />
Se implementeaz structura de conducere a<br />
manipulatorului robotic utilizând:<br />
• o structur cablat<br />
• o structur ROM<br />
• o structur AMI<br />
un automat programabil. În acest caz condiia<br />
x este dat de un numrtor.<br />
Se va realiza implementarea utilizând:<br />
diagrame de stri