

第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2-22 液 位 與 流 量 率 感 測 器 與 控 制 實 驗 系 統<br />
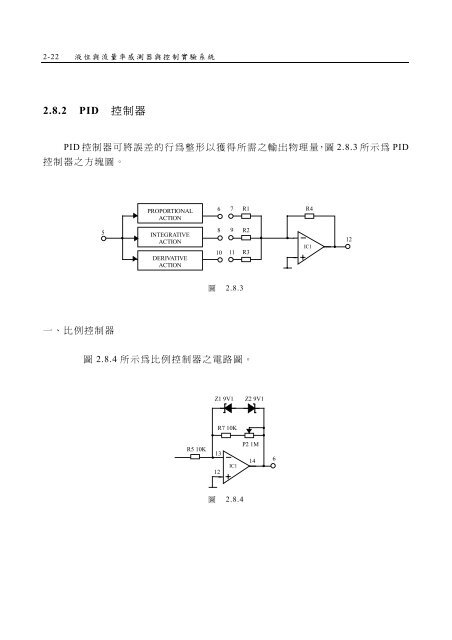
2.8.2 PID 控 制 器<br />
PID 控 制 器 可 將 誤 差 的 行 為 整 形 以 獲 得 所 需 之 輸 出 物 理 量 , 圖 2.8.3 所 示 為 PID<br />
控 制 器 之 方 塊 圖 。<br />
PROPORTIONAL<br />
ACTION<br />
6 7<br />
R1<br />
R4<br />
5<br />
INTEGRATIVE<br />
ACTION<br />
DERIVATIVE<br />
ACTION<br />
8 9<br />
10 11<br />
R2<br />
R3<br />
IC1<br />
12<br />
圖 2.8.3<br />
一 、 比 例 控 制 器<br />
圖 2.8.4 所 示 為 比 例 控 制 器 之 電 路 圖 。<br />
Z1 9V1<br />
Z2 9V1<br />
R7 10K<br />
R5 10K<br />
13<br />
12<br />
IC1<br />
P2 1M<br />
14<br />
6<br />
圖 2.8.4


