

第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3-16 液 位 與 流 量 率 感 測 器 與 控 制 實 驗 系 統<br />
參 數 值 。<br />
以 這 種 方 法 紫 雅 格 與 尼 可 士 發 展 如 下 表 所 示 之 公 式 , 獲 得 K P 、τ I 與 τ D 之 基 本<br />
控 制 器 K P K P /K I K D /K P<br />
P<br />
PI<br />
PID<br />
T<br />
KTm<br />
0.9T<br />
KTm<br />
1.2T<br />
KTm<br />
3.3Tm<br />
2Tm<br />
0.5Tm<br />
3.4 比 例 控 制 器<br />
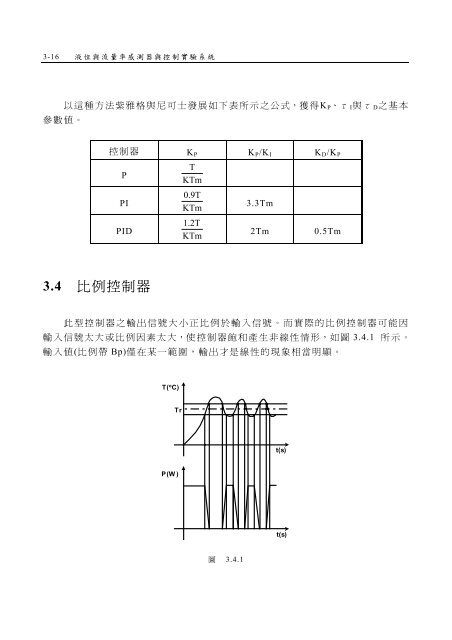
此 型 控 制 器 之 輸 出 信 號 大 小 正 比 例 於 輸 入 信 號 。 而 實 際 的 比 例 控 制 器 可 能 因<br />
輸 入 信 號 太 大 或 比 例 因 素 太 大 , 使 控 制 器 飽 和 產 生 非 線 性 情 形 , 如 圖 3.4.1 所 示 。<br />
輸 入 值 ( 比 例 帶 Bp) 僅 在 某 一 範 圍 , 輸 出 才 是 線 性 的 現 象 相 當 明 顯 。<br />
T( o C)<br />
Tr<br />
t(s)<br />
P(W)<br />
t(s)<br />
圖 3.4.1


