

第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
第 三 章 程 序 控 制 3-17<br />
由 誤 差 放 大 器 的 誤 差 信 號 經 比 例 控 制 器 以 K P 比 例 放 大 。 在 比 例 帶 之 外 , 控 制<br />
器 之 輸 出 類 似 ON/OFF 狀 況 , 這 意 味 著 全 部 的 功 率 經 由 致 動 器 輸 出 。 在 穩 態 的 情<br />
形 , 送 到 致 動 器 的 功 率 則 依 負 載 消 耗 與 致 動 器 效 率 而 定 。<br />
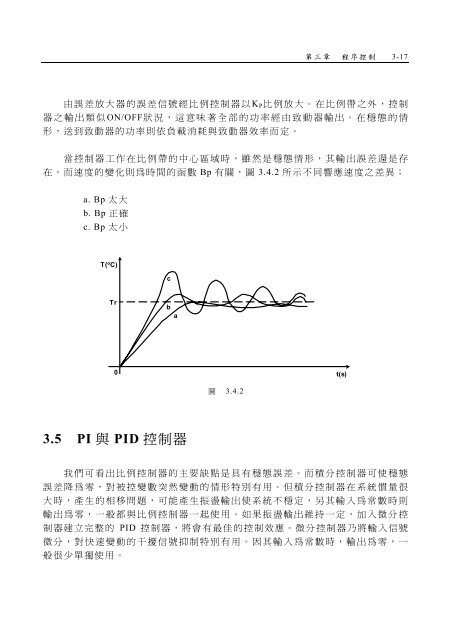
當 控 制 器 工 作 在 比 例 帶 的 中 心 區 域 時 , 雖 然 是 穩 態 情 形 , 其 輸 出 誤 差 還 是 存<br />
在 。 而 速 度 的 變 化 則 為 時 間 的 函 數 Bp 有 關 , 圖 3.4.2 所 示 不 同 響 應 速 度 之 差 異 ;<br />
a. Bp 太 大<br />
b. Bp 正 確<br />
c. Bp 太 小<br />
T( o C)<br />
c<br />
Tr<br />
b<br />
a<br />
0<br />
t(s)<br />
圖 3.4.2<br />
3.5 PI 與 PID 控 制 器<br />
我 們 可 看 出 比 例 控 制 器 的 主 要 缺 點 是 具 有 穩 態 誤 差 。 而 積 分 控 制 器 可 使 穩 態<br />
誤 差 降 為 零 , 對 被 控 變 數 突 然 變 動 的 情 形 特 別 有 用 。 但 積 分 控 制 器 在 系 統 慣 量 很<br />
大 時 , 產 生 的 相 移 問 題 , 可 能 產 生 振 盪 輸 出 使 系 統 不 穩 定 , 另 其 輸 入 為 常 數 時 則<br />
輸 出 為 零 , 一 般 都 與 比 例 控 制 器 一 起 使 用 。 如 果 振 盪 輸 出 維 持 一 定 , 加 入 微 分 控<br />
制 器 建 立 完 整 的 PID 控 制 器 , 將 會 有 最 佳 的 控 制 效 應 。 微 分 控 制 器 乃 將 輸 入 信 號<br />
微 分 , 對 快 速 變 動 的 干 擾 信 號 抑 制 特 別 有 用 。 因 其 輸 入 為 常 數 時 , 輸 出 為 零 , 一<br />
般 很 少 單 獨 使 用 。


