

第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»
第ä¸ç« - æ©æ¢°å·¥ç¨ç³»

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3-12 液 位 與 流 量 率 感 測 器 與 控 制 實 驗 系 統<br />
3.2.3 微 分 控 制 (D)<br />
此 控 制 行 為 可 由 圖 3.2.4 所 示 之 純 微 分 器 說 明 , 轉 移 函 數 如 下 述 :<br />
W(s) = s × K D = s × τD<br />
如 中 τD 微 分 行 為 時 間 常 數 , 如 圖 3.2.5 所 示 。 其 輸 出 值 等 於 時 間 τD 之 輸 入<br />
值 , 一 直 保 持 到 輸 入 斜 率 改 變 。<br />
3.2.4 PID 控 制<br />
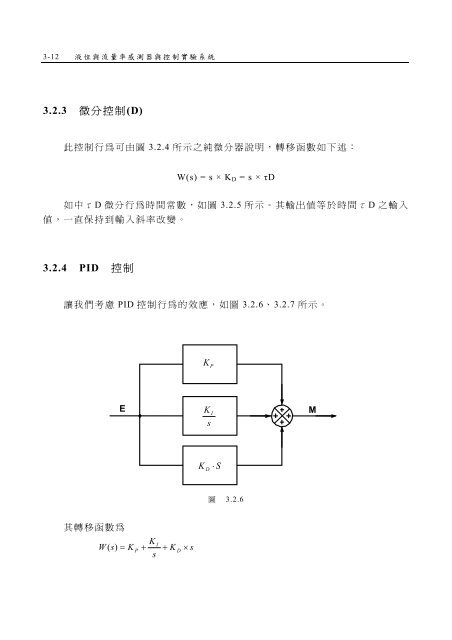
讓 我 們 考 慮 PID 控 制 行 為 的 效 應 , 如 圖 3.2.6、 3.2.7 所 示 。<br />
K P<br />
E<br />
K I<br />
s<br />
M<br />
K D<br />
⋅ S<br />
圖 3.2.6<br />
其 轉 移 函 數 為<br />
K<br />
I<br />
W ( s)<br />
= K<br />
P<br />
+ + K<br />
D<br />
× s<br />
s


