

SSIIチュートリアル佐藤
SSIIチュートリアル佐藤
SSIIチュートリアル佐藤

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
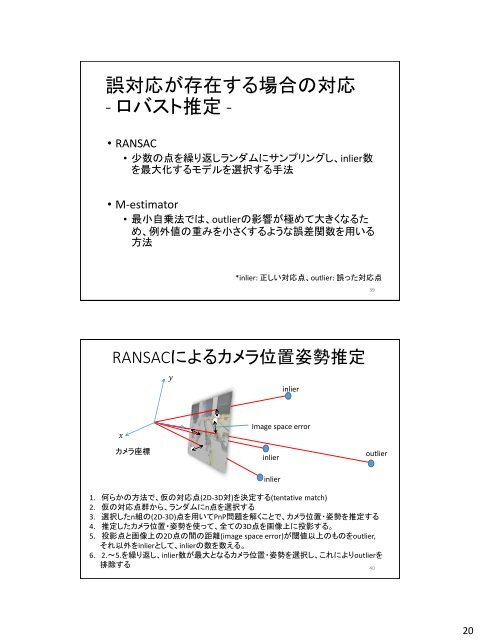
誤 対 応 が 存 在 する 場 合 の 対 応- ロバスト 推 定 -• RANSAC• 少 数 の 点 を 繰 り 返 しランダムにサンプリングし、inlier 数を 最 大 化 するモデルを 選 択 する 手 法• M-estimator• 最 小 自 乗 法 では、outlierの 影 響 が 極 めて 大 きくなるため、 例 外 値 の 重 みを 小 さくするような 誤 差 関 数 を 用 いる方 法*inlier: 正 しい 対 応 点 、outlier: 誤 った 対 応 点39RANSACによるカメラ 位 置 姿 勢 推 定yinlierxカメラ 座 標Image space errorinlieroutlierinlier1. 何 らかの 方 法 で、 仮 の 対 応 点 (2D-3D 対 )を 決 定 する(tentative match)2. 仮 の 対 応 点 群 から、ランダムにn 点 を 選 択 する3. 選 択 したn 組 の(2D-3D) 点 を 用 いてPnP 問 題 を 解 くことで、カメラ 位 置 ・ 姿 勢 を 推 定 する4. 推 定 したカメラ 位 置 ・ 姿 勢 を 使 って、 全 ての3D 点 を 画 像 上 に 投 影 する。5. 投 影 点 と 画 像 上 の2D 点 の 間 の 距 離 (image space error)が 閾 値 以 上 のものをoutlier,それ 以 外 をinlierとして、inlierの 数 を 数 える。6. 2.~5.を 繰 り 返 し、inlier 数 が 最 大 となるカメラ 位 置 ・ 姿 勢 を 選 択 し、これによりoutlierを排 除 する4020