

SSIIチュートリアル佐藤
SSIIチュートリアル佐藤
SSIIチュートリアル佐藤
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
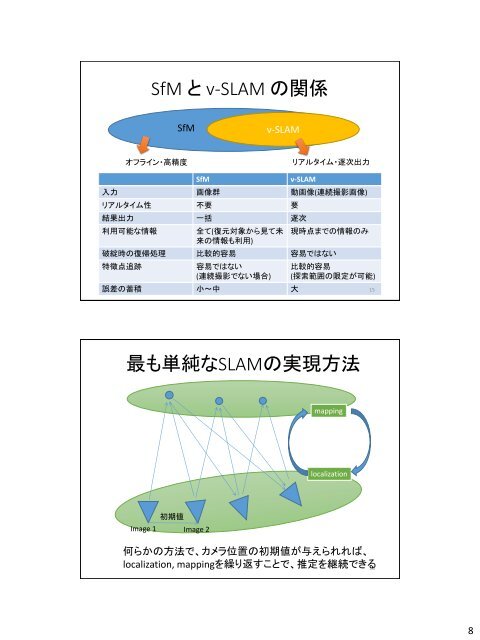
SfM と v-SLAM の 関 係SfMv-SLAMオフライン・ 高 精 度リアルタイム・ 逐 次 出 力SfMv-SLAM入 力 画 像 群 動 画 像 ( 連 続 撮 影 画 像 )リアルタイム 性 不 要 要結 果 出 力 一 括 逐 次利 用 可 能 な 情 報全 て( 復 元 対 象 から 見 て 未来 の 情 報 も 利 用 )現 時 点 までの 情 報 のみ破 綻 時 の 復 帰 処 理 比 較 的 容 易 容 易 ではない特 徴 点 追 跡容 易 ではない( 連 続 撮 影 でない 場 合 )誤 差 の 蓄 積 小 ~ 中 大比 較 的 容 易( 探 索 範 囲 の 限 定 が 可 能 )15最 も 単 純 なSLAMの 実 現 方 法mappinglocalization初 期 値Image 1 Image 2何 らかの 方 法 で、カメラ 位 置 の 初 期 値 が 与 えられれば、localization, mappingを 繰 り 返 すことで、 推 定 を 継 続 できる168