

Analiza stanu odkształcenia - Instytut Konstrukcji Budowlanych
Analiza stanu odkształcenia - Instytut Konstrukcji Budowlanych
Analiza stanu odkształcenia - Instytut Konstrukcji Budowlanych

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
12. ANALIZA STANU ODKSZTAŁCENIA 1<br />
12. <br />
12. <strong>Analiza</strong> <strong>stanu</strong> odkształcenia<br />
12.1. Składowe <strong>stanu</strong> odkształcenia<br />
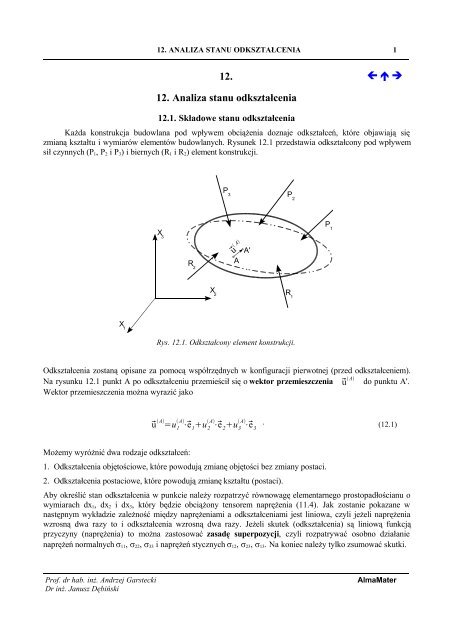
Każda konstrukcja budowlana pod wpływem obciążenia doznaje odkształceń, które objawiają się<br />
zmianą kształtu i wymiarów elementów budowlanych. Rysunek 12.1 przedstawia odkształcony pod wpływem<br />
sił czynnych (P 1 , P 2 i P 3 ) i biernych (R 1 i R 2 ) element konstrukcji.<br />
P 2<br />
P 3<br />
P 1<br />
X 3<br />
A'<br />
R A<br />
2<br />
R 1<br />
u A<br />
X 1<br />
X 2<br />
Rys. 12.1. Odkształcony element konstrukcji.<br />
Odkształcenia zostaną opisane za pomocą współrzędnych w konfiguracji pierwotnej (przed odkształceniem).<br />
Na rysunku 12.1 punkt A po odkształceniu przemieścił się o wektor przemieszczenia u A do punktu A'.<br />
Wektor przemieszczenia można wyrazić jako<br />
u A =u 1<br />
A ⋅e 1<br />
u 2 A ⋅e 2<br />
u 3 A ⋅e 3<br />
. (12.1)<br />
Możemy wyróżnić dwa rodzaje odkształceń:<br />
1. Odkształcenia objętościowe, które powodują zmianę objętości bez zmiany postaci.<br />
2. Odkształcenia postaciowe, które powodują zmianę kształtu (postaci).<br />
Aby określić stan odkształcenia w punkcie należy rozpatrzyć równowagę elementarnego prostopadłościanu o<br />
wymiarach dx 1 , dx 2 i dx 3 , który będzie obciążony tensorem naprężenia (11.4). Jak zostanie pokazane w<br />
następnym wykładzie zależność między naprężeniami a odkształceniami jest liniowa, czyli jeżeli naprężenia<br />
wzrosną dwa razy to i odkształcenia wzrosną dwa razy. Jeżeli skutek (odkształcenia) są liniową funkcją<br />
przyczyny (naprężenia) to można zastosować zasadę superpozycji, czyli rozpatrywać osobno działanie<br />
naprężeń normalnych s 11 , s 22 , s 33 i naprężeń stycznych s 12 , s 23 , s 13 . Na koniec należy tylko zsumować skutki.<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 2<br />
Zakładając, że naprężenia normalne są dodatnie (rozciągające) będą one powodowały zwiększenie długości<br />
krawędzi prostopadłościanu. Na rysunku 12.2 przedstawiono elementarny prostopadłościan pod wpływem<br />
działania naprężeń normalnych. Zmiany długości krawędzi zostały pokazane na rzutach prostopadłościanu na<br />
trzy płaszczyzny.<br />
dx 2<br />
Ddx 2<br />
dx 1<br />
dx 3<br />
Ddx 3<br />
X 3<br />
22<br />
P<br />
33<br />
11<br />
11<br />
22<br />
dx 3<br />
Ddx 3<br />
Ddx 1<br />
X 2<br />
dx 2<br />
Ddx 2<br />
X 1<br />
33<br />
Ddx 1<br />
dx 1<br />
Rys. 12.2. Odkształcenia objętościowe.<br />
Jak widać na rysunku 12.2 zmiany długości krawędzi wynoszą Ddx 1 , Ddx 2 , Ddx 3 . Taki stan odkształcenia<br />
można jednoznacznie opisać za pomocą trzech wielkości<br />
11<br />
= dx 1<br />
dx 1<br />
, (12.2)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 3<br />
22<br />
= dx 2<br />
dx 2<br />
, (12.3)<br />
33<br />
= dx 3<br />
dx 3<br />
. (12.4)<br />
Wielkości (12.2), (12.3) i (12.4) nazywamy odkształceniami liniowymi. Odkształcenia liniowe mogą<br />
przyjmować wartości dodatnie, ujemne oraz zero.<br />
Zmianie długości krawędzi towarzyszy zmiana objętości. Zmianę tą nazywa się odkształceniem<br />
objętościowym. Objętość prostopadłościanu przed odkształceniem wynosiła<br />
dV =dx 1<br />
⋅dx 2<br />
⋅dx 3<br />
. (12.5)<br />
Po odkształceniu objętość prostopadłościanu wynosi<br />
dV dV =dx 1<br />
dx 1 ⋅dx 2<br />
dx 2 ⋅dx 3<br />
dx 3 <br />
. (12.6)<br />
Wzór (12.6) będzie miał postać<br />
⋅<br />
dV dV =dx 1 dx <br />
1<br />
1<br />
dx 1<br />
⋅dx 2 ⋅ 1 dx 2<br />
dx 2<br />
<br />
⋅dx ⋅ 1 dx <br />
3<br />
3<br />
dx . (12.7)<br />
3<br />
Uwzględniając wzory (12.2), (12.3), (12.4) i (12.5) wzór (12.7) będzie miał postać<br />
dV dV =dV⋅1 11 ⋅1 22 ⋅1 33 <br />
. (12.8)<br />
Wzór (12.8) można przekształcić do postaci<br />
dV dV<br />
dV<br />
=1 11<br />
22<br />
33<br />
11<br />
⋅ 22<br />
11<br />
⋅ 33<br />
22<br />
⋅ 33<br />
11<br />
⋅ 22<br />
⋅ 33<br />
. (12.9)<br />
Odkształcenia są wielkością małą natomiast ich iloczyny są wielkościami małymi wyższego rzędu. W związku<br />
z tym możemy pominąć człony zawierające iloczyny odkształceń. Wzór (12.9) będzie miał postać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 4<br />
dV<br />
dV = 11 22 33<br />
. (12.10)<br />
Wielkość po lewej stronie równania nazywa się względnym odkształceniem objętościowym lub dylatacją.<br />
Jak widać jest ona sumą wszystkich liniowych odkształceń.<br />
Odkształcenie prostopadłościanu wynikające z działania naprężeń stycznych wiąże się ze zmianą kształtu lub<br />
inaczej zmianą postaci. Zmianie ulegają kąty nachylenia krawędzi prostopadłościanu bez zmiany ich długości.<br />
X 3<br />
23<br />
32<br />
13<br />
23<br />
31<br />
23<br />
13<br />
P<br />
13<br />
12<br />
21<br />
X 2<br />
12<br />
12<br />
X 1<br />
Rys. 12.3. Odkształcenia postaciowe.<br />
Miarą zmiany postaci prostopadłościanu są trzy kąty. Pierwszy z nich w płaszczyźnie X 1 X 2<br />
12<br />
= 12<br />
12<br />
. (12.11)<br />
Drugi z nich w płaszczyźnie X 2 X 3<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 5<br />
23<br />
= 23<br />
23<br />
. (12.12)<br />
Trzeci z nich w płaszczyźnie X 1 X 3<br />
13<br />
= 13<br />
13<br />
. (12.13)<br />
Interpretacją tych kątów jest różnica między kątem prostym w konfiguracji początkowej a kątem ostrym w<br />
konfiguracji aktualnej (odkształconej).<br />
Stan odkształcenia w punkcie opisują trzy składowe odkształcenia liniowego e 11 , e 22 , e 33 oraz trzy składowe<br />
odkształcenia postaciowego g 12 , g 13 , g 23 .<br />
12.2 Równania geometryczne Cauchy'ego<br />
W rozdziale tym zostaną podane zależności pomiędzy współrzędnymi wektora przemieszczenia a<br />
składowymi <strong>stanu</strong> odkształcenia.<br />
Rysunek 12.4 przedstawia rzut elementarnego prostopadłościanu na płaszczyznę X 1 X 2 .<br />
Odkształcenie liniowe e 11 wynosi<br />
∣P ' A' '∣−∣P A∣<br />
11<br />
=<br />
∣P A∣<br />
, (12.14)<br />
w którym<br />
∣P A∣=dx 1 (12.15)<br />
oraz<br />
∣P ' A' '∣=dx 1<br />
u 1<br />
∂ u 1<br />
∂ x 1<br />
⋅dx 1<br />
−u 1<br />
=dx 1<br />
∂ u 1<br />
∂ x 1<br />
⋅dx 1<br />
. (12.16)<br />
Ostatecznie odkształcenie liniowe e 11 wynosi<br />
11<br />
=<br />
dx 1<br />
∂ u 1<br />
∂ x 1<br />
⋅dx 1<br />
−dx 1<br />
dx 1<br />
= ∂ u 1<br />
∂ x 1<br />
. (12.17)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 6<br />
u 1<br />
∂ u 1<br />
∂ x 2<br />
⋅dx 2<br />
B<br />
X 2<br />
P A<br />
B''<br />
B'<br />
D'<br />
u 2<br />
∂ u 2<br />
⋅dx<br />
∂ x 2<br />
2<br />
u B <br />
D<br />
A'<br />
∂u 2<br />
⋅dx<br />
∂ x 1<br />
1<br />
12<br />
u 1<br />
∂ u 1<br />
x 2<br />
dx 2<br />
u P<br />
P'<br />
u A<br />
12<br />
A''<br />
u 2<br />
x 1<br />
dx 1<br />
∂ x 1<br />
⋅dx 1<br />
X 1<br />
Rys. 12.4. Rzut odkształconego elementarnego prostopadłościanu na płaszczyznę X 1X 2.<br />
W podobny sposób można wyznaczyć odkształcenie liniowe e 22 .<br />
∣P ' B ' '∣−∣P B∣<br />
22<br />
=<br />
∣P B∣<br />
, (12.18)<br />
w którym<br />
∣P B∣=dx 2 (12.19)<br />
oraz<br />
∣P ' B ' '∣=dx 2<br />
u 2<br />
∂ u 2<br />
∂ x 2<br />
⋅dx 2<br />
−u 2<br />
=dx 2<br />
∂ u 2<br />
∂ x 2<br />
⋅dx 2<br />
. (12.20)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 7<br />
Ostatecznie odkształcenie liniowe e 22 wynosi<br />
22<br />
=<br />
dx 2<br />
∂ u 2<br />
∂ x 2<br />
⋅dx 2<br />
−dx 2<br />
dx 2<br />
= ∂ u 2<br />
∂ x 2<br />
. (12.21)<br />
Z równań (12.17) i (12.21) wynika zależność<br />
33<br />
= ∂ u 3<br />
∂ x 3<br />
. (12.22)<br />
Z rysunku 12.4 wynika, że<br />
∣A' ' A'∣<br />
tg 12<br />
=<br />
∣P ' A' '∣ , (12.23)<br />
w którym<br />
∣A' ' A'∣= ∂ u 2<br />
∂ x 1<br />
⋅dx 1<br />
. (12.24)<br />
Uwzględniając (12.16) wzór (12.24) będzie miał postać<br />
∂ u 2<br />
∂ x 1<br />
⋅dx 1<br />
tg 12<br />
=<br />
dx 1<br />
∂ u =<br />
1<br />
⋅dx<br />
∂ x 1<br />
1<br />
∂ u 2<br />
∂ x 1<br />
1 ∂ u 1<br />
∂ x 1<br />
. (12.25)<br />
W przypadku małych odkształceń tangens kąta równa się w przybliżeniu kątowi wyrażonemu w radianach.<br />
Ponadto wartość<br />
zapisać jako<br />
∂ u 1<br />
∂ x 1<br />
jest wielkością małą w porównaniu z jednością. Wzór (12.25) można ostatecznie<br />
12<br />
= ∂ u 2<br />
∂ x 1<br />
. (12.26)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 8<br />
Tangens kąta b 12 wymosi<br />
∣B ' ' B '∣<br />
tg 12<br />
=<br />
∣P ' B ' '∣ , (12.27)<br />
w którym<br />
∣B ' ' B '∣= ∂ u 1<br />
∂ x 2<br />
⋅dx 2<br />
. (12.28)<br />
Uwzględniając (12.20) wzór (12.28) będzie miał postać<br />
∂ u 1<br />
∂ x 2<br />
⋅dx 2<br />
tg 12<br />
=<br />
dx 2<br />
∂ u =<br />
2<br />
⋅dx<br />
∂ x 2<br />
2<br />
∂ u 1<br />
∂ x 2<br />
1 ∂ u 2<br />
∂ x 2<br />
. (12.29)<br />
W przypadku małych odkształceń tangens kąta równa się w przybliżeniu kątowi wyrażonemu w radianach.<br />
Ponadto wartość<br />
zapisać jako<br />
∂ u 2<br />
∂ x 2<br />
jest wielkością małą w porównaniu z jednością. Wzór (12.29) można ostatecznie<br />
12<br />
= ∂ u 1<br />
∂ x 2<br />
. (12.30)<br />
Ostatecznie kąt odkształcenia postaciowego będzie miał postać<br />
12<br />
= ∂ u 1<br />
∂ x 2<br />
∂ u 2<br />
∂ x 1<br />
. (12.31)<br />
Analogicznie można wyznaczyć pozostałe odkształcenia postaciowe.<br />
23<br />
= ∂ u 2<br />
∂ x 3<br />
∂ u 3<br />
∂ x 2<br />
. (12.32)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 9<br />
13<br />
= ∂ u 1<br />
∂ x 3<br />
∂ u 3<br />
∂ x 1<br />
. (12.33)<br />
Równania (12.17), (12.21), (12.22), (12.31), (12.32) oraz (12.33) noszą nazwę równań geometrycznych<br />
Cauchy'ego. Wprowadzając oznaczenia odkształceń postaciowych<br />
{ 12<br />
=2⋅ 12<br />
23<br />
=2⋅ ,<br />
23<br />
(12.34)<br />
13<br />
=2⋅ 13<br />
równania geometryczne można przedstawić w zapisie wskaźnikowym jako<br />
ij<br />
= 1 2 ⋅ u i , j<br />
u j ,i <br />
. (12.35)<br />
Wielkości u i,j oraz u j,i nazywa się gradientem przemieszczenia. Korzystając z wzoru (12.35) można zapisać<br />
ji<br />
= 1 2 ⋅ u j ,i<br />
u i , j <br />
. (12.36)<br />
Porównując wzory (12.35) i (12.36) można stwierdzić, że<br />
ij<br />
= ji<br />
. (12.37)<br />
Rozpisując równanie (12.35) można otrzymać wzory na odkształcenia liniowe<br />
{ 11<br />
=u 1,1<br />
=<br />
∂ u 1<br />
∂ x 1<br />
22<br />
=u 2,2<br />
= ∂ u 2<br />
(12.38)<br />
∂ x 2<br />
33<br />
=u 3,3<br />
= ∂ u 3<br />
∂ x 3<br />
oraz wzory na odkształcenia postaciowe<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 10<br />
{ 12<br />
= 1 2 ⋅ u 1,2<br />
u 2,1 = 1 2 ⋅ <br />
∂ u 1<br />
∂ u 2<br />
1 ∂ x 2<br />
∂ x<br />
23<br />
= 1 2 ⋅ u 2,3<br />
u 3,2 = 1 2 ⋅ ∂ u 2<br />
∂ u 3<br />
2 ∂ x 3<br />
∂ x<br />
13<br />
= 1 2 ⋅ u 1,3<br />
u 3,1 = 1 2 ⋅ ∂ u 1<br />
∂ u 3<br />
1 ∂ x 3<br />
∂ x<br />
. (12.39)<br />
Dodatkową informację o deformacji daje kąt obrotu dwusiecznej zawartej między krawędziami elementarnego<br />
prostopadłościanu. Rysunek 12.5 przedstawia obrót dwusiecznej kąta zawartego między krawędziami w<br />
konfiguracji pierwotnej i aktualnej. Dodatni kąt obrotu dwusiecznej w 12 następuje od osi X 2 do osi X 1 .<br />
X 2<br />
P A<br />
B'<br />
D'<br />
12<br />
12<br />
B<br />
P'<br />
D<br />
<br />
12<br />
45 o<br />
A'<br />
45 o<br />
X 1<br />
Rys. 12.5. Obrót dwusiecznej kąta między krawędziami.<br />
Zaznaczony na rysunku kąt d wynosi<br />
= 90o − 12<br />
12 <br />
=45 o 12<br />
12 <br />
−<br />
2<br />
2<br />
. (12.40)<br />
Kąt obrotu dwusiecznej można wyznaczyć z zależności<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 11<br />
<br />
45 o = 12<br />
45 o 12<br />
12 .<br />
− (12.41)<br />
2<br />
12<br />
Kąt obrotu dwusiecznej ostatecznie wynosi<br />
12<br />
= 12<br />
− 12 <br />
2<br />
. (12.42)<br />
Korzystając z równań (12.26) i (12.30) kąt obrotu dwusiecznej wynosi<br />
12<br />
= 1 2 ⋅ ∂ u 1<br />
∂ x 2<br />
− ∂ u 2<br />
∂ x 1 . (12.43)<br />
Z wzoru (12.43) można wyliczyć wartość kąta w 21 , która wynosi<br />
21<br />
= 1 2 ⋅ ∂ u 2<br />
∂ x 1<br />
− ∂ u 1<br />
∂ x 2 . (12.44)<br />
Korzystając z równań (12.26) i (12.30) wzór (12.44) będzie miał postać<br />
21<br />
= − 12 12<br />
=− .<br />
2<br />
12<br />
(12.45)<br />
Analogicznie można zapisać dla pozostałych kątów obrotu<br />
23<br />
=− 32<br />
= 1 2 ⋅ ∂ u 2<br />
∂ x 3<br />
− ∂ u 3<br />
∂ x 2 , (12.46)<br />
13<br />
=− 31<br />
= 1 2 ⋅ ∂ u 1<br />
∂ x 3<br />
− ∂ u 3<br />
∂ x 1 . (12.47)<br />
Kąt obrotu dwusiecznej można zapisać ogólnie<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 12<br />
ij<br />
=− ji<br />
= 1 2 ⋅ ∂ u i<br />
− ∂ u <br />
j<br />
∂ x j<br />
∂ x . (12.48)<br />
i<br />
12.3 Tensor odkształcenia<br />
Sześć składowych <strong>stanu</strong> odkształcenia wyrażonych równaniami (12.38) i (12.39) można zapisać w<br />
postaci tablicy<br />
ij<br />
=[ 11<br />
12<br />
13<br />
21<br />
22<br />
23<br />
31<br />
32<br />
33]<br />
. (12.49)<br />
Tablica ta jest podobna do tensora naprężenia (11.4). Aby tablica (12.49) była tensorem musi ona spełniać<br />
prawo transformacji tensora (10.74), które w przypadku <strong>stanu</strong> odkształcenia będzie miało postać<br />
k ' p'<br />
=a k ' i<br />
⋅a p' j<br />
⋅ ij<br />
. (12.50)<br />
Korzystając z wzoru (12.35) lewą stronę (12.50) można wyrazić jako<br />
k ' p'<br />
= 1 2 ⋅ u k ' , p'<br />
u p' , k ' <br />
. (12.51)<br />
Gradient przemieszczenia można wyrazić jako<br />
u k ' p'<br />
= ∂ u k '<br />
∂ x p'<br />
= ∂ u k '<br />
∂ x j<br />
⋅ ∂ x j<br />
∂ x p'<br />
. (12.52)<br />
Korzystając z (10.52) można wzór (12.52) zapisać jako<br />
u k ' p'<br />
= ∂ u k '<br />
∂ x p'<br />
= ∂ u k '<br />
∂ x j<br />
⋅a jp'<br />
. (12.53)<br />
Ze względu na to, że funkcja cosinus jest funkcją parzystą można zapisać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 13<br />
a jp'<br />
=a p' j (12.54)<br />
czyli kosinus kąta między osią j a osią p' równa się kosinusowi między osią p' a osią j. Wzór (12.53) można<br />
więc zapisać<br />
u k ' p'<br />
= ∂ u k '<br />
∂ x p'<br />
= ∂ u k '<br />
∂ x j<br />
⋅a p' j<br />
. (12.55)<br />
Z prawa transformacji wektora (10.50)<br />
u k '<br />
=a k ' i<br />
⋅u i<br />
. (12.56)<br />
Podstawiając (12.56) do (12.55) otrzymano<br />
u k ' p'<br />
= a k ' i<br />
⋅u i <br />
∂ x j<br />
⋅a p' j<br />
=a k ' i<br />
⋅a p' j<br />
⋅u i , j<br />
. (12.57)<br />
Z równania (12.57) widać, że gradienty przemieszczeń tworzą tensor drugiego rzędu.<br />
u p' k '<br />
= ∂ u p'<br />
∂ x k '<br />
= ∂ u p'<br />
∂ x i<br />
⋅ ∂ x i<br />
∂ x k '<br />
. (12.58)<br />
Korzystając z (10.52) można wzór (12.58) zapisać jako<br />
u p' k '<br />
= ∂ u p'<br />
∂ x k '<br />
= ∂ u p'<br />
∂ x i<br />
⋅a ik '<br />
. (12.59)<br />
Wzór (12.59) można zapisać<br />
u p' k '<br />
= ∂ u p'<br />
∂ x k '<br />
= ∂ u p'<br />
∂ x i<br />
⋅a k ' i<br />
. (12.60)<br />
Z prawa transformacji wektora (10.50)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 14<br />
u p'<br />
=a p' j<br />
⋅u j<br />
. (12.61)<br />
Podstawiając (12.61) do (12.60) otrzymano<br />
u p' k '<br />
= a p' j<br />
⋅u j <br />
∂ x i<br />
⋅a k ' i<br />
=a k ' i<br />
⋅a p' j<br />
⋅u j , i<br />
. (12.62)<br />
Podstawiając (12.57) i (12.62) do (12.51) otrzymano<br />
k ' p'<br />
= 1 2 ⋅ a k ' i<br />
⋅a p' j<br />
⋅u i , j<br />
a k ' i<br />
⋅a p' j<br />
⋅u j ,i <br />
, (12.63)<br />
który będzie miał postać<br />
k ' p'<br />
=a k ' i<br />
⋅a p' j<br />
⋅ 1 2 ⋅ u i , j<br />
u j ,i =a k ' i<br />
⋅a p' j<br />
⋅ ij<br />
. (12.64)<br />
Ze wzoru (12.64) widać, że (12.49) stanowi tensor drugiego rzędu nazywany tensorem odkształcenia. Tensor<br />
ten jest tensorem symetrycznym.<br />
W podobny sposób można udowodnić, że współrzędne w ij tworzą także tensor drugiego rzędu. Jednakże w<br />
przeciwieństwie do tensora odkształcenia tensor ten jest tensorem skośnie symetrycznym (10.103). Tensor ten<br />
nazywa się tensorem obrotu i ma postać<br />
11<br />
12<br />
13<br />
0 12<br />
13<br />
ij<br />
=[ 21<br />
22<br />
23<br />
31<br />
32<br />
33]=[ ]<br />
− 12<br />
0 .<br />
23<br />
− 13<br />
− 23<br />
0<br />
(12.65)<br />
We wzorze (12.65) wykorzystano właściwość tensora skośnie symetrycznego (10.104).<br />
12.4 Odkształcenia główne<br />
Podobnie jak dla tensora naprężenia istnieje pewien układ współrzędnych, w którym odkształcenia<br />
liniowe będą ekstremalne natomiast odkształcenia postaciowe będą wynosiły zero. Odkształcenia główne<br />
oblicza się z równania charakterystycznego<br />
3 −I 1<br />
⋅ 2 I 2<br />
⋅−I 3<br />
=0 , (12.66)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 15<br />
w którym I 1 , I 2 i I 3 są niezmiennikami <strong>stanu</strong> odkształcenia. Pierwszy niezmiennik ma postać<br />
I 1<br />
= kk<br />
= 11<br />
22<br />
33<br />
. (12.67)<br />
Porównując wzór (12.67) i (12.10) można stwierdzić, że pierwszy niezmiennik <strong>stanu</strong> odkształcenia równa się<br />
względnemu odkształceniu objętościowemu.<br />
Drugi niezmiennik <strong>stanu</strong> odkształcenia ma postać<br />
I 2<br />
= ∂∣ ij ∣<br />
∂ kk<br />
= ∂∣ ij ∣<br />
∂ 11<br />
∂∣ ij ∣<br />
∂ 22<br />
∂∣ ij ∣<br />
∂ 33<br />
, (12.68)<br />
który można przedstawić w postaci<br />
=∣<br />
I 11<br />
12<br />
2<br />
21<br />
22∣ ∣ 11<br />
13<br />
31<br />
33∣ ∣ 22<br />
23<br />
32<br />
33∣ . (12.69)<br />
Trzeci niezmiennik <strong>stanu</strong> odkształcenia ma postać<br />
I 3<br />
=∣ ij<br />
∣=∣ 11<br />
12<br />
13<br />
21<br />
22<br />
23<br />
31<br />
32<br />
33∣<br />
. (12.70)<br />
Rozwiązaniem równania (12.66) są trzy odkształcenia główne, które można uporządkować w sposób<br />
I<br />
=max 1<br />
, 2<br />
, 3<br />
<br />
III<br />
=min 1<br />
, 2<br />
, 3<br />
<br />
(12.71)<br />
natomiast<br />
III<br />
II<br />
I<br />
. (12.72)<br />
Odkształcenia e I , e II , e III nazywa się odkształceniami głównymi uporządkowanymi.<br />
Chcąc wyznaczyć kierunki główne odpowiadające poszczególnym odkształceniom głównym należy wartości<br />
odkształceń uporządkowanych wstawić do układu równań podobnego do (11.72). Układ równań będzie miał w<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 16<br />
przypadku <strong>stanu</strong> odkształcenia postać<br />
{ 11<br />
− I ⋅n 1 1<br />
21<br />
⋅n 1 2<br />
31<br />
⋅n 1 3<br />
=0<br />
12<br />
⋅n 1 1<br />
22<br />
− I ⋅n 1 2<br />
32<br />
⋅n 1 3<br />
=0<br />
13<br />
⋅n 1 1<br />
23<br />
⋅n 1 2<br />
33<br />
− I ⋅n 1 3<br />
=0<br />
. (12.73)<br />
Układ równań (12.73) jest układem równań jednorodnym, z którego można obliczyć jedynie stosunki<br />
pomiędzy kosinusami kierunkowymi n 1<br />
(1)<br />
, n 2<br />
(1)<br />
, n 3<br />
(1)<br />
. Chcąc wyznaczyć kierunki główne związane z<br />
odkształceniem e I należy wstawić warunek, który muszą spełniać kosinusy kierunkowe n 1<br />
(1)<br />
, n 2<br />
(1)<br />
, n 3<br />
(1)<br />
(na<br />
podstawie (10.61))<br />
1<br />
[n 1 ] 2 1<br />
[n 2 ] 2 [n<br />
1] 2 3<br />
=1 . (12.74)<br />
Podstawiając pozostałe naprężenia główne można wyznaczyć pozostałe kosinusy kierunkowe. Zamiast jednego<br />
z równań układu jednorodnego należy podstawić zależności<br />
2<br />
[n 1 ] 2 2<br />
[n 2 ] 2 [n<br />
2] 2 3<br />
=1 , (12.75)<br />
3<br />
[n 1 ] 2 3<br />
[n 2 ] 2 [n<br />
3] 2 3<br />
=1 . (12.76)<br />
Kosinusy te będą tworzyły macierz transformacji w postaci<br />
[n<br />
1<br />
1<br />
2<br />
n 1<br />
3<br />
n 1<br />
n 2<br />
1<br />
n 2<br />
2<br />
n 2<br />
3<br />
n 3<br />
1<br />
n 3<br />
2<br />
n 3<br />
3]<br />
. (12.77)<br />
Aby układ współrzędnych był układem prawoskrętnym musi być spełniony warunek<br />
∣n<br />
1<br />
1<br />
2<br />
n 1<br />
3<br />
n 1<br />
n 2<br />
1<br />
n 2<br />
2<br />
n 2<br />
3<br />
n 3<br />
1<br />
n 3<br />
2<br />
n 3<br />
3∣=1 . (12.78)<br />
Jeżeli wyznacznik równa się minus jeden należy w jednym wierszu zmienić wszystkie znaki na przeciwne.<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 17<br />
12.5 Ekstremalne odkształcenia postaciowe<br />
Położenie układu współrzędnych, w którym odkształcenia postaciowe przyjmują wartości ekstremalne<br />
najwygodniej jest określić w układzie osi głównych ( e 1 > e 2 > e 3 ). Wzory transformacyjne mają postać<br />
1' 1'<br />
=a 2 1' 1<br />
⋅ 1<br />
a 2 1' 2<br />
⋅ 2<br />
a 2 1' 3<br />
⋅ ,<br />
3<br />
2' 2'<br />
=a 2 2' 1<br />
⋅ 1<br />
a 2 2' 2<br />
⋅ 2<br />
a 2 2' 3<br />
⋅ ,<br />
3<br />
3' 3'<br />
=a 2 3' 1<br />
⋅ 1<br />
a 2 3' 2<br />
⋅ 2<br />
a 2 3' 3<br />
⋅ ,<br />
3<br />
1' 2'<br />
=a 1' 1<br />
⋅a 2' 1<br />
⋅ 1<br />
a 1' 2<br />
⋅a 2' 2<br />
⋅ 2<br />
a 1' 3<br />
⋅a 2' 3<br />
⋅ 3<br />
,<br />
1' 3'<br />
=a 1' 1<br />
⋅a 3' 1<br />
⋅ 1<br />
a 1' 2<br />
⋅a 3' 2<br />
⋅ 2<br />
a 1' 3<br />
⋅a 3' 3<br />
⋅ 3<br />
,<br />
(12.79)<br />
(12.80)<br />
(12.81)<br />
(12.82)<br />
(12.83)<br />
2' 3'<br />
=a 2' 1<br />
⋅a 3' 1<br />
⋅ 1<br />
a 2' 2<br />
⋅a 3' 2<br />
⋅ 2<br />
a 2' 3<br />
⋅a 3' 3<br />
⋅ 3<br />
. (12.84)<br />
Ekstremalne odkształcenia postaciowe będą się znajdowały na płaszczyznach nachylonych pod kątem 45<br />
stopni w stosunku do układu osi głównych.<br />
Dla układu współrzędnych obróconemu o 45 stopni wokół osi X 3 macierz transformacji ma postać (kąt<br />
dodatni kręci od osi X 1 do X 2 )<br />
a i ' j<br />
=[a 1' 1<br />
a 1' 2<br />
a 1' 3<br />
a 2' 1<br />
a 2' 2<br />
a 2' 3<br />
a 3' 1<br />
a 3' 2<br />
a 3' 3]=[<br />
2 2<br />
0]<br />
2 2<br />
− 2 2<br />
2 2<br />
0 0<br />
0<br />
.<br />
0<br />
(12.85)<br />
Odkształcenia w układzie transponowanym opisuje tensor odkształcenia<br />
=[<br />
<br />
i ' j'<br />
1<br />
2<br />
2<br />
− − 0]<br />
1 2<br />
2<br />
− − 1 2<br />
1<br />
2<br />
2 2<br />
0 0<br />
0<br />
.<br />
0<br />
(12.86)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 18<br />
Dla układu współrzędnych obróconemu o 45 stopni wokół osi X 1 (kąt dodatni kręci od osi X 2 do osi X 3 )<br />
macierz transformacji ma postać<br />
0 0<br />
1' 1<br />
a 1' 2<br />
a 1' 3 2 2<br />
0<br />
a i ' j<br />
=[a a 2' 1<br />
a 2' 2<br />
a 2' 3<br />
2 2<br />
a 3' 1<br />
a 3' 2<br />
a 3' 3]=[0<br />
0 − 2<br />
2<br />
2<br />
2<br />
]<br />
.<br />
(12.87)<br />
Odkształcenia w układzie transponowanym opisuje tensor odkształcenia<br />
0 0<br />
<br />
0<br />
2<br />
3<br />
i ' j'<br />
=[0 ]<br />
− − 2 3<br />
2 2 .<br />
0 − − 2 3<br />
2<br />
3<br />
2 2<br />
(12.88)<br />
Dla układu współrzędnych obróconemu o 45 stopni wokół osi X 2 (kąt dodatni kręci od osi X 3 do osi X 1 )<br />
macierz transformacji ma postać<br />
0 −<br />
1' 1<br />
a 1' 2<br />
a 1' 3 2<br />
a i ' j<br />
=[a a 2' 1<br />
a 2' 2<br />
a 2' 3<br />
a 3' 1<br />
a 3' 2<br />
a 3' 3]=[2 2<br />
]<br />
2<br />
0 0 0 . 2<br />
0<br />
2 2<br />
(12.89)<br />
Odkształcenia w układzie transponowanym opisuje tensor odkształcenia<br />
=[<br />
<br />
i ' j'<br />
3<br />
1<br />
0 − 3 − 1<br />
2<br />
2<br />
0 0 0<br />
− 3 − 1<br />
2<br />
0<br />
3<br />
1<br />
2<br />
]<br />
.<br />
(12.90)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 19<br />
Ogólnie można powiedzieć, że pierwsze z ekstremalnych odkształceń postaciowych wyznacza się ze wzoru<br />
maxI /minI<br />
=± 1 − 2<br />
2<br />
, (12.91)<br />
a odpowiadające mu odkształcenia liniowe wyznacza się ze wzoru<br />
I<br />
= 1 2<br />
2<br />
. (12.92)<br />
Drugie z ekstremalnych odkształceń postaciowych wyznacza się ze wzoru<br />
maxII /minII<br />
=± 2 − 3<br />
2<br />
, (12.93)<br />
a odpowiadające mu odkształcenia liniowe wyznacza się ze wzoru<br />
II<br />
= 2 3<br />
2<br />
. (12.94)<br />
Trzecie z ekstremalnych odkształceń postaciowych wyznacza się ze wzoru<br />
maxIII /minIII<br />
=± 3 − 1<br />
2<br />
, (12.95)<br />
a odpowiadające mu odkształcenia liniowe wyznacza się ze wzoru<br />
III<br />
= 3 1<br />
2<br />
. (12.96)<br />
12.6 Rozkład tensora odkształcenia na aksjator i dewiator<br />
Tensor odkształcenia, tak samo jak i każdy inny symetryczny tensor rzędu drugiego można rozłożyć na<br />
część aksjatorową (część kulistą) oraz część dewiatorową. Zgodnie ze wzorem (10.107) aksjator będzie<br />
wynosił<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 20<br />
O ij<br />
= 1 3 ⋅ ⋅ pp ij<br />
. (12.97)<br />
Aksjator można przedstawić w formie tablicy<br />
O ij<br />
=[1<br />
3 ⋅ pp<br />
0 0<br />
0<br />
0 0<br />
1<br />
3 ⋅ pp<br />
0<br />
. (12.98)<br />
1<br />
3<br />
pp] ⋅<br />
We wzorach (12.97) i (12.98) e pp równa się pierwszemu niezmiennikowi tensora naprężenia. Zgodnie ze<br />
wzorem (10.109) dewiator tensora naprężenia będzie wynosił<br />
=[ 11<br />
− 1 3 ⋅ pp<br />
12<br />
13<br />
D ij<br />
= ij<br />
− 1 3 ⋅ ⋅ pp ij 21<br />
22<br />
− 1 3 ⋅ pp<br />
.<br />
23<br />
(12.99)<br />
31<br />
32<br />
33<br />
− 1 3<br />
pp] ⋅<br />
Dla tensora odkształcenia w osiach głównych rozkład na aksjator i dewiator będzie miał postać<br />
3<br />
gl<br />
=[1<br />
⋅ pp<br />
0 0<br />
I<br />
−<br />
1<br />
0<br />
3 ⋅ pp<br />
0<br />
1<br />
0 0<br />
3<br />
pp][ 1 3 ⋅ pp<br />
0 0<br />
0 II<br />
− 1 3 ⋅ pp<br />
0 , (12.100)<br />
⋅ 0 0 III<br />
− 1 3<br />
pp] ⋅<br />
w którym<br />
pp<br />
= I<br />
II<br />
III<br />
. (12.101)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 21<br />
Jak łatwo sprawdzić pierwszy niezmiennik dewiatora (suma odkształceń na głównej przekątnej) równa się<br />
zero.<br />
Dewiator tensora odkształcenia w osiach głównych można zapisać jako<br />
D<br />
I<br />
D ij<br />
=[<br />
0 0<br />
D<br />
0 II<br />
0 . (12.102)<br />
0 0 <br />
D]<br />
III<br />
Korzystając z zależności<br />
D III<br />
=− D D<br />
I<br />
− II<br />
(12.103)<br />
wzór (12.102) będzie miał postać<br />
D<br />
I<br />
D ij<br />
=[<br />
0 0<br />
D<br />
0 II<br />
0 , (12.104)<br />
0 0 − D I<br />
−<br />
D]<br />
II<br />
który można przedstawić jako sumę dwóch tensorów<br />
D<br />
I<br />
D ij<br />
=[<br />
0 0 0 0<br />
D<br />
0 0 0 0 II<br />
0 . (12.105)<br />
0 0 −<br />
D][0 I 0 0 −<br />
D]<br />
II<br />
Każdy z tych tensorów reprezentuje stan odkształcenia nazywany czystym odkształceniem postaciowym. Dla<br />
pierwszego z tensorów zgodnie ze wzorem (12.90) ekstremalne odkształcenia postaciowe wynoszą<br />
=[<br />
−<br />
i ' j'<br />
D D<br />
I<br />
I<br />
0 − − D D<br />
I<br />
− I<br />
D<br />
2<br />
2 0 0 I<br />
]<br />
0 0 0<br />
.<br />
0 0 0<br />
− − D D<br />
I<br />
− I<br />
− D D D<br />
0<br />
I<br />
I I<br />
0 0<br />
2<br />
2<br />
]=[<br />
(12.106)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 22<br />
Dla drugiego z tensorów zgodnie ze wzorem (12.88) ekstremalne odkształcenia postaciowe wynoszą<br />
0 0<br />
II<br />
0<br />
i ' j'<br />
=[0 D D<br />
− II <br />
− D D<br />
II<br />
−− II ]=[0 0 0<br />
]<br />
D<br />
2<br />
2 0 0 − .<br />
II<br />
0 − D II<br />
−−<br />
D II<br />
D D<br />
II<br />
−<br />
D II<br />
0 − II<br />
0<br />
2<br />
2<br />
(12.107)<br />
Rysunek 12.6 przedstawia dwa czyste ścinania reprezentowane przez tensory (12.105).<br />
X I<br />
I<br />
D<br />
2<br />
I<br />
D<br />
2<br />
X III<br />
D<br />
II<br />
2<br />
D<br />
II<br />
2<br />
D<br />
I<br />
I<br />
D<br />
2<br />
D<br />
II<br />
2<br />
I<br />
D<br />
2<br />
D<br />
<br />
II<br />
D<br />
II<br />
2<br />
X III<br />
X II<br />
Rys. 12.6. Dwa czyste ścinania.<br />
Korzystając z zależności<br />
D II<br />
=− D D<br />
I<br />
− III<br />
(12.108)<br />
wzór (12.102) będzie miał postać<br />
D<br />
I<br />
D ij<br />
=[<br />
0 0<br />
0 − D D<br />
I<br />
− III<br />
0 . (12.109)<br />
0 0 <br />
D]<br />
III<br />
który można przedstawić jako sumę dwóch tensorów<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 23<br />
D<br />
I<br />
D ij<br />
=[<br />
0 0 0 0<br />
D<br />
D<br />
0 − I<br />
0 0 − III<br />
0 . (12.110)<br />
0 0 0][0 0 0 <br />
D]<br />
III<br />
Dla pierwszego tensora zgodnie z (12.86) ekstremalne odkształcenia postaciowe wynoszą<br />
=[<br />
<br />
i ' j'<br />
D D<br />
I<br />
− I <br />
2<br />
− I<br />
D −− I<br />
D<br />
2<br />
− D D<br />
I<br />
−− I <br />
2<br />
D I<br />
−<br />
D I<br />
0 0 0]=[<br />
2<br />
0<br />
0<br />
D<br />
0 − I<br />
0<br />
0]<br />
.<br />
0 0<br />
0 0<br />
− I<br />
D<br />
(12.111)<br />
Dla drugiego tensora zgodnie z (12.88) ekstremalne odkształcenia postaciowe wynoszą<br />
0 0<br />
−<br />
0<br />
III<br />
i ' j'<br />
=[0 D D<br />
III<br />
− − D D<br />
III<br />
−<br />
]=[0 III<br />
0 0<br />
]<br />
D<br />
2<br />
2 0 0 .<br />
III<br />
0 − − D D<br />
III<br />
− III<br />
− D D<br />
D<br />
III<br />
III 0 III<br />
0<br />
2<br />
2<br />
(12.112)<br />
Rysunek 12.7 przedstawia dwa czyste ścinania reprezentowane przez tensory (12.110).<br />
X II<br />
I<br />
D<br />
2<br />
I<br />
D<br />
2<br />
X III<br />
D<br />
III<br />
2<br />
D<br />
III<br />
2<br />
D<br />
I<br />
I<br />
D<br />
2<br />
D<br />
III<br />
2<br />
I<br />
D<br />
2<br />
D<br />
III<br />
D<br />
III<br />
2<br />
X I<br />
X II<br />
Rys. 12.7. Dwa czyste ścinania.<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 24<br />
Korzystając z zależności<br />
D I<br />
=− D D<br />
II<br />
− III<br />
(12.113)<br />
wzór (12.102) będzie miał postać<br />
II<br />
D ij<br />
=[− D D<br />
− III<br />
0 0<br />
D<br />
0 II<br />
0 . (12.114)<br />
0 0 <br />
D]<br />
III<br />
który można przedstawić jako sumę dwóch tensorów<br />
D<br />
II<br />
D ij<br />
=[−<br />
D<br />
0 0 III<br />
0 0<br />
D<br />
0 II<br />
0 0 0 0<br />
. (12.115)<br />
0 0 0][−<br />
0 0 <br />
D]<br />
III<br />
Dla pierwszego tensora zgodnie z (12.86) ekstremalne odkształcenia postaciowe wynoszą<br />
=[<br />
−<br />
i ' j'<br />
D D<br />
II<br />
II<br />
2<br />
− − D II<br />
− II<br />
2<br />
D<br />
− − D D<br />
II<br />
− II<br />
2<br />
− D D<br />
II<br />
II<br />
2<br />
0 0 0]=[<br />
0<br />
0<br />
0<br />
D<br />
II<br />
0<br />
0]<br />
.<br />
0 0<br />
0 0<br />
D<br />
II<br />
(12.116)<br />
Dla drugiego tensora zgodnie z (12.90) ekstremalne odkształcenia postaciowe wynoszą<br />
=[<br />
<br />
i ' j'<br />
D D<br />
III<br />
− III <br />
2<br />
− III<br />
0 − D D<br />
III<br />
−− III <br />
2<br />
0 0 0<br />
D<br />
−−<br />
D III<br />
2<br />
0<br />
D<br />
D III<br />
− III<br />
2<br />
]=[ − III<br />
D<br />
0 0 − III<br />
0 0 0<br />
D<br />
0 0 ]<br />
.<br />
(12.117)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 25<br />
Rysunek 12.8 przedstawia dwa czyste ścinania reprezentowane przez tensory (12.115).<br />
X II<br />
D<br />
II<br />
2<br />
D<br />
II<br />
2<br />
X I<br />
D<br />
III<br />
2<br />
D<br />
III<br />
2<br />
D<br />
II<br />
D<br />
III<br />
D<br />
II<br />
2<br />
D<br />
III<br />
2<br />
D<br />
II<br />
2<br />
D<br />
III<br />
2<br />
X I<br />
X III<br />
Rys. 12.8. Dwa czyste ścinania.<br />
12.7 Płaski stan odkształcenia<br />
Płaski stan odkształcenia jest szczególnym przypadkiem <strong>stanu</strong> odkształcenia. Występuje on na przykład<br />
wtedy, gdy wszystkie odkształcenia z indeksem 3 są równe zero. Tensor odkształcenia będzie miał w układzie<br />
współrzędnych X 1 X 2 postać<br />
11<br />
12<br />
0<br />
ij<br />
=[ 0]<br />
21<br />
22<br />
0 .<br />
0 0<br />
(12.118)<br />
Płaski stan odkształcenia może występować w długiej ścianie oporowej, w której obciążenie w kierunku osi X 3<br />
nie zmienia się natomiast obciążeniem ściany oporowej w kierunku osi X 1 może być na przykład parcie wody<br />
lub parcie gruntu p(x 2 ). Ścianę taką przedstawia rysunek 12.9.<br />
Rozpatrując wycięty myślowo element ściany należy stwierdzić, że aby element ten był poddany płaskiemu<br />
stanowi odkształcenia muszą się pojawić naprężenia s 33 czyli tensor naprężenia stowarzyszony z płaskim<br />
stanem odkształcenia będzie miał postać<br />
ij<br />
=[ 11<br />
12<br />
0<br />
21<br />
22<br />
0<br />
0 0 33]<br />
. (12.119)<br />
Ogólnie można stwierdzić, że płaskiemu stanowi odkształcenia nie towarzyszy płaski stan naprężenia.<br />
Zostanie do dokładnie omówione w następnym wykładzie.<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 26<br />
X 2<br />
p(x 2<br />
)<br />
X 1<br />
33<br />
33<br />
X 3<br />
Rys. 12.9. Ściana oporowa.<br />
Ze względu na podobieństwa pomiędzy tensorem odkształcenia i tensorem naprężenia wzory w płaskim stanie<br />
odkształcenia będą podobne do wzorów dla płaskiego <strong>stanu</strong> naprężenia opisanych w punkcie 7.5. Zamiast<br />
naprężeń normalnych będą występowały odpowiednie odkształcenia liniowe natomiast zamiast naprężeń<br />
stycznych będą występowały odkształcenia postaciowe. Indeks X będzie się równał indeksowi 1 a indeks Y<br />
indeksowi 2. Przykładowe odkształcenia liniowe i postaciowe przedstawia rysunek 12.10.<br />
X 2<br />
X 1<br />
dx 2<br />
dx 2<br />
X 2<br />
2⋅ 12<br />
=2⋅ 21<br />
dx 1<br />
dx 1<br />
X 1<br />
Rys. 12.10. Odkształcenia liniowe i postaciowe w płaskim stanie odkształcenia.<br />
Wzory transformacyjne będą miały dla płaskiego <strong>stanu</strong> odkształcenia postać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 27<br />
1' 1'<br />
= 11 22<br />
2<br />
− 11 22<br />
⋅cos2⋅<br />
2<br />
12<br />
⋅sin2⋅ ,<br />
(12.120)<br />
2' 2'<br />
= 11 22<br />
2<br />
− − 11 22<br />
⋅cos2⋅−<br />
2<br />
12<br />
⋅sin2⋅ ,<br />
(12.121)<br />
1' 2'<br />
=− − 11 22<br />
⋅sin2⋅<br />
2<br />
12<br />
⋅cos2⋅ . (12.122)<br />
Kąt nachylenia osi głównych wynosi<br />
tg 2⋅ gl<br />
= 2⋅ 12<br />
11<br />
− 22<br />
. (12.123)<br />
Podstawiając wartość kąta głównego do wzorów (12.120) i (12.121) można uzyskać wartości odkształceń<br />
głównych. Wartości te można sprawdzić za pomocą wzoru<br />
1/2<br />
= 11 22<br />
2<br />
± − 2<br />
11 22 2 .<br />
2 <br />
(12.124)<br />
12<br />
Kąt nachylenia ekstremalnych odkształceń postaciowych można obliczyć ze wzoru<br />
tg 2⋅ post<br />
=− 11 − 22<br />
2⋅ 12<br />
. (12.125)<br />
Podstawiając wartość kąta a post do wzoru (12.122) można uzyskać wartość ekstremalnych odkształceń<br />
postaciowych. Wartość tę można sprawdzić za pomocą wzoru<br />
12 ext<br />
=± − 2<br />
11 22 2 .<br />
2 <br />
(12.126)<br />
12<br />
Podstawiając wartość kąta a post do wzorów (12.120) i (12.121) można uzyskać wartość odkształceń liniowych<br />
odpowiadających ekstremalnym odkształceniom postaciowym. Wartości te można sprawdzić za pomocą<br />
wzoru<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 28<br />
11 post<br />
= 22 post<br />
= 11 22<br />
2<br />
. (12.127)<br />
12.8 Tensor odkształcenia dla odkształceń skończonych<br />
Gdy ciało odkształcalne poddane jest działaniu obciążenia, to poszczególne punkty poruszają się, co dla<br />
obserwatora zewnętrznego widoczne jest jako przemieszczanie i obrót poszczególnych jego części.<br />
Najwygodniejszym sposobem rozróżnienia odkształcenia ciała i jego ruchu jako bryły sztywnej jest zbadanie<br />
zmian odległości pomiędzy dwoma punktami położonymi bardzo blisko siebie. Ciało, które zostało<br />
odkształcone i przemieszczone pod wpływem sił czynnych i biernych przedstawia rysunek 12.11.<br />
P 2<br />
R 1<br />
P 1<br />
u A<br />
A'(x i<br />
)<br />
ds<br />
B'(x i<br />
+dx i<br />
)<br />
X 3<br />
=x 3<br />
A(x i<br />
)<br />
R 2<br />
X 1<br />
=x 1<br />
ds 0<br />
u B<br />
B(x i<br />
+dx i<br />
)<br />
X 2<br />
=x 2<br />
Rys. 12.11. Ciało pod wpływem działania sił czynnych i biernych.<br />
Punkt A w konfiguracji pierwotnej ma współrzędne x i natomiast po odkształceniu w konfiguracji aktualnej<br />
punkt A przemieścił się do punktu A' o współrzędnych x i . Podobnie punkt B w konfiguracji pierwotnej znalazł<br />
się w konfiguracji aktualnej w punkcie B'. Pierwotną odległość ds 0 pomiędzy punktami A i B oblicza się z<br />
zależności<br />
ds 0 2 =dx 1 2 dx 2 2 dx 3 2 =dx i<br />
⋅dx i<br />
. (12.128)<br />
Odległość punktów A' i B' po odkształceniu oblicza się ze wzoru<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 29<br />
ds 2 =d 1 2 d 2 2 d 3 2 =d i<br />
⋅d i<br />
. (12.129)<br />
Poprzednio zakładano, że odkształcenia są bardzo małe. Obecnie nie będą nakładane na odkształcenia żadne<br />
ograniczenia. Odkształcenia takie nazywają się odkształceniami skończonymi.<br />
Opisując stan odkształcenia ciała można posłużyć się współrzędnymi punktów w konfiguracji pierwotnej x i .<br />
Opis taki nazywa się opisem materialnym lub opisem Lagrange'a. Można się także posłużyć współrzędnymi<br />
w konfiguracji aktualnej x i . Opis taki nazywa się opisem przestrzennym lub opisem Eulera.<br />
W opisie Lagrange'a współrzędne w konfiguracji aktualnej (po odkształceniu) wyraża się za pomocą<br />
współrzędnych w konfiguracji pierwotnej. Wektor przemieszczenia punktu A ma współrzędne<br />
u i A =u i<br />
= i<br />
−x i<br />
. (12.130)<br />
Wektor przemieszczenia punktu B ma współrzędne<br />
u i B = i<br />
d i − x i<br />
dx i <br />
. (12.131)<br />
Z równania (12.130) można otrzymać zależność<br />
i<br />
=u i<br />
x i<br />
=u i x 1<br />
, x 2<br />
, x 3 x i<br />
. (12.132)<br />
Po obliczeniu różniczek z lewej i prawej strony otrzymano<br />
d i<br />
= ∂ u i<br />
∂ x 1<br />
⋅dx 1<br />
∂ u i<br />
∂ x 2<br />
⋅dx 2<br />
∂ u i<br />
∂ x 3<br />
⋅dx 3<br />
dx i<br />
= ∂ u i<br />
∂ x j<br />
⋅dx j<br />
dx i<br />
. (12.133)<br />
Długość odcinak A'B' w konfiguracji aktualnej wynosi<br />
=<br />
ds 2 =d i<br />
⋅d ∂ u i<br />
i<br />
⋅dx<br />
∂ x j<br />
dx i ⋅ ∂ u i<br />
⋅dx<br />
j<br />
∂ x k<br />
dx i . (12.134)<br />
k<br />
Po wymnożeniu otrzymano<br />
ds 2 = ∂ u i<br />
∂ x j<br />
⋅dx j<br />
⋅ ∂ u i<br />
∂ x k<br />
⋅dx k<br />
∂ u i<br />
∂ x j<br />
⋅dx j<br />
⋅dx i<br />
∂ u i<br />
∂ x k<br />
⋅dx k<br />
⋅dx i<br />
dx i<br />
⋅dx i<br />
. (12.135)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 30<br />
W członie pierwszym należy zamienić wskaźniki i na k oraz k na i. W członie trzecim należy zmienić<br />
wskaźniki i na j oraz k na i. Wzór (12.135) będzie miało postać<br />
ds 2 = ∂ u k<br />
∂ x j<br />
⋅dx j<br />
⋅ ∂ u k<br />
∂ x i<br />
⋅dx i<br />
∂ u i<br />
∂ x j<br />
⋅dx j<br />
⋅dx i<br />
∂ u j<br />
∂ x i<br />
⋅dx i<br />
⋅dx j<br />
dx i<br />
⋅dx i<br />
. (12.136)<br />
Różnica odległości w konfiguracji aktualnej i konfiguracji pierwotnej wynosi<br />
ds 2 −ds 0 2 = ∂ u k<br />
∂ x j<br />
⋅dx j<br />
⋅ ∂ u k<br />
∂ x i<br />
⋅dx i<br />
∂ u i<br />
∂ x j<br />
⋅dx j<br />
⋅dx i<br />
∂ u j<br />
∂ x i<br />
⋅dx i<br />
⋅dx j<br />
dx i<br />
⋅dx i<br />
−dx i<br />
⋅dx i<br />
, (12.137)<br />
który można przedstawić w formie<br />
⋅<br />
ds 2 −ds 0 2 =dx i<br />
⋅dx ∂ u i<br />
j<br />
∂ u j<br />
∂ u k<br />
⋅ ∂ u k<br />
j ∂ x j<br />
∂ x i<br />
∂ x i<br />
∂ x . (12.138)<br />
Wzór (12.138) można przekształcić<br />
ds 2 −ds 0 2<br />
2⋅dx i<br />
⋅dx j<br />
= ij L = 1 2 ⋅ ∂ u i<br />
∂ x j<br />
∂ u j<br />
∂ x i<br />
∂ u k<br />
∂ x i<br />
⋅ ∂ u k<br />
∂ x j . (12.139)<br />
Wzór (12.139) określa tensor dla odkształceń skończonych Lagrange'a (Greena). Jest to zbiór dziewięciu<br />
bezwymiarowych wartości skalarnych, z których tylko sześć jest niezależnych ze względu na<br />
L L<br />
ij<br />
= .<br />
ji<br />
(12.140)<br />
Dla i=1 i j=1 wzór (12.139) będzie miał postać<br />
L 11<br />
= ∂ u 1<br />
1 ∂ x 1<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
1 ∂ x 1<br />
∂ x 1<br />
∂ x 1<br />
∂ x 1<br />
∂ x 1<br />
∂ x . (12.141)<br />
Dla i=2 i j=2 wzór (12.139) będzie miał postać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 31<br />
L 22<br />
= ∂ u 2<br />
1 ∂ x 2<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
2 ∂ x 2<br />
∂ x 2<br />
∂ x 2<br />
∂ x 2<br />
∂ x 2<br />
∂ x . (12.142)<br />
Dla i=3 i j=3 wzór (12.139) będzie miał postać<br />
L 33<br />
= ∂ u 3<br />
1 ∂ x 3<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
3 ∂ x 3<br />
∂ x 3<br />
∂ x 3<br />
∂ x 3<br />
∂ x 3<br />
∂ x . (12.143)<br />
Dla i=1 i j=2 wzór (12.139) będzie miał postać<br />
L 12<br />
= L 21<br />
= 1 2 ⋅ ∂ u 1<br />
∂ u 2<br />
∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
2 ∂ x 2<br />
∂ x 1<br />
∂ x 1<br />
∂ x 2<br />
∂ x 1<br />
∂ x 2<br />
∂ x 1<br />
∂ x . (12.144)<br />
Dla i=2 i j=3 wzór (12.139) będzie miał postać<br />
L 23<br />
= L 32<br />
= 1 2 ⋅ ∂ u 2<br />
∂ u 3<br />
∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
3 ∂ x 3<br />
∂ x 2<br />
∂ x 2<br />
∂ x 3<br />
∂ x 2<br />
∂ x 3<br />
∂ x 2<br />
∂ x . (12.145)<br />
Dla i=1 i j=3 wzór (12.139) będzie miał postać<br />
L 13<br />
= L 31<br />
= 1 2 ⋅ ∂ u 1<br />
∂ u 3<br />
∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
3 ∂ x 3<br />
∂ x 1<br />
∂ x 1<br />
∂ x 3<br />
∂ x 1<br />
∂ x 3<br />
∂ x 1<br />
∂ x . (12.146)<br />
W opisie Eulera współrzędne w konfiguracji pierwotnej wyraża się za pomocą współrzędnych w konfiguracji<br />
aktualnej. Z równania (12.130) można otrzymać zależność<br />
x i<br />
= i<br />
−u i<br />
= i<br />
−u i 1<br />
, 2<br />
, 3 <br />
. (12.147)<br />
Po obliczeniu różniczek z lewej i prawej strony otrzymano<br />
−<br />
d x i<br />
=d ∂ u i<br />
i<br />
⋅d <br />
∂ 1<br />
∂ u i<br />
⋅d <br />
1<br />
∂ 2<br />
∂ u i<br />
⋅d 3 2<br />
∂ =d − ∂ u i<br />
i<br />
⋅d .<br />
3<br />
∂ j<br />
(12.148)<br />
j<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 32<br />
Długość odcinak AB w konfiguracji pierwotnej wynosi<br />
=<br />
ds 0 2 =dx i<br />
⋅dx d − ∂ u i<br />
i i<br />
⋅d j ∂ ⋅ d − ∂ u i<br />
i<br />
⋅d k j<br />
∂ . (12.149)<br />
k<br />
Po wymnożeniu otrzymano<br />
ds 0 2 =d i<br />
⋅d i<br />
−d i<br />
⋅ ∂ u i<br />
∂ k<br />
⋅d k<br />
−d i<br />
⋅ ∂ u i<br />
∂ j<br />
⋅d j<br />
∂ u i<br />
∂ j<br />
⋅d j<br />
⋅ ∂ u i<br />
∂ k<br />
⋅d k<br />
(12.150)<br />
W drugim członie należy zmienić wskaźnik i na j oraz k na i. W czwartym członie należy zmienić wskaźnik i<br />
na k oraz k na i. W wyniku otrzymano<br />
ds 0 2 =d i<br />
⋅d i<br />
−d j<br />
⋅ ∂ u j<br />
∂ i<br />
⋅d i<br />
−d i<br />
⋅ ∂ u i<br />
∂ j<br />
⋅d j<br />
∂ u k<br />
∂ j<br />
⋅d j<br />
⋅ ∂ u k<br />
∂ i<br />
⋅d i<br />
(12.151)<br />
Różnica odległości w konfiguracji aktualnej i konfiguracji pierwotnej wynosi<br />
ds 2 −ds 0 2 =d i<br />
⋅d i<br />
−d i<br />
⋅d i<br />
d j<br />
⋅ ∂ u j<br />
∂ i<br />
⋅d i<br />
d i<br />
⋅ ∂ u i<br />
∂ j<br />
⋅d j<br />
− ∂ u k<br />
∂ j<br />
⋅d j<br />
⋅ ∂ u k<br />
∂ i<br />
⋅d i<br />
, (12.152)<br />
który można przedstawić w formie<br />
⋅<br />
ds 2 −ds 0 2 =d i<br />
⋅d ∂ u i<br />
j<br />
∂ u j<br />
− ∂ u k<br />
⋅ ∂ u k<br />
j ∂ j<br />
∂ i<br />
∂ i<br />
∂ . (12.153)<br />
Wzór (12.153) można przedstawić w formie<br />
ds 2 −ds 0 2<br />
2⋅d i<br />
⋅d j<br />
= ij E = 1 2 ⋅ ∂ u i<br />
∂ j<br />
∂ u j<br />
∂ i<br />
− ∂ u k<br />
∂ i<br />
⋅ ∂ u k<br />
∂ j . (12.154)<br />
Wzór (12.154) określa tensor dla odkształceń skończonych Eulera (Almansiego). Jest to zbiór dziewięciu<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 33<br />
bezwymiarowych wartości skalarnych, z których tylko sześć jest niezależnych ze względu na<br />
E E<br />
ij<br />
= .<br />
ji<br />
(12.155)<br />
Dla i=1 i j=1 wzór (12.154) będzie miał postać<br />
E 11<br />
= ∂ u 1<br />
− 1 ∂ 1<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 1<br />
3<br />
∂ 1<br />
∂ 1<br />
∂ 1<br />
∂ 1<br />
∂ 1<br />
∂ . (12.156)<br />
Dla i=2 i j=2 wzór (12.154) będzie miał postać<br />
E 22<br />
= ∂ u 2<br />
− 1 ∂ 2<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
2 ∂ 2<br />
∂ 2<br />
∂ 2<br />
∂ 2<br />
∂ 2<br />
∂ . (12.157)<br />
Dla i=3 i j=3 wzór (12.154) będzie miał postać<br />
E 33<br />
= ∂ u 3<br />
− 1 ∂ 3<br />
2 ⋅ ∂ u 1<br />
⋅ ∂ u 1<br />
∂ u 2<br />
⋅ ∂ u 2<br />
∂ u 3<br />
⋅ ∂ u 3<br />
3<br />
∂ 3<br />
∂ 3<br />
∂ 3<br />
∂ 3<br />
∂ 3<br />
∂ . (12.158)<br />
Dla i=1 i j=2 wzór (12.154) będzie miał postać<br />
E 12<br />
= E 21<br />
= 1 2 ⋅ ∂ u 1<br />
∂ u 2<br />
− ∂ u 1<br />
⋅ ∂ u 1<br />
− ∂ u 2<br />
⋅ ∂ u 2<br />
− ∂ u 3<br />
⋅ ∂ u 2<br />
3<br />
∂ 2<br />
∂ 1<br />
∂ 1<br />
∂ 2<br />
∂ 1<br />
∂ 2<br />
∂ 1<br />
∂ . (12.159)<br />
Dla i=2 i j=3 wzór (12.154) będzie miał postać<br />
E 23<br />
= E 32<br />
= 1 2 ⋅ ∂ u 2<br />
∂ u 3<br />
− ∂ u 1<br />
⋅ ∂ u 1<br />
− ∂ u 2<br />
⋅ ∂ u 2<br />
− ∂ u 3<br />
⋅ ∂ u 3<br />
3<br />
∂ 3<br />
∂ 2<br />
∂ 2<br />
∂ 3<br />
∂ 2<br />
∂ 3<br />
∂ 2<br />
∂ . (12.160)<br />
Dla i=1 i j=3 wzór (12.154) będzie miał postać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 34<br />
E 13<br />
= E 31<br />
= 1 2 ⋅ ∂ u 1<br />
∂ u 3<br />
− ∂ u 1<br />
⋅ ∂ u 1<br />
− ∂ u 2<br />
⋅ ∂ u 2<br />
− ∂ u 3<br />
⋅ ∂ u 3<br />
3<br />
∂ 3<br />
∂ 1<br />
∂ 1<br />
∂ 3<br />
∂ 1<br />
∂ 3<br />
∂ 1<br />
∂ . (12.161)<br />
Opis materialny jest stosowany w teorii konstrukcji, ponieważ warunki podparcia znane są w konfiguracji<br />
pierwotnej. W opisie tym kostka elementarna jest prostopadłościanem przed odkształceniem.<br />
Opis przestrzenny jest stosowany przede wszystkim w mechanice płynów. W opisie tym elementarna kostka<br />
jest prostopadłościanem w konfiguracji aktualnej. Porównanie obu opisów przedstawia rysunek 12.12.<br />
X 2<br />
A<br />
D'<br />
C'<br />
x 2<br />
D'<br />
C'<br />
D<br />
A'<br />
u A<br />
C<br />
B<br />
B'<br />
X 1<br />
A<br />
D<br />
A'<br />
u A<br />
B<br />
C<br />
B'<br />
x 1<br />
Opis materialny – Lagrange'a<br />
Opis przestrzenny - Eulera<br />
A, B, C, D – konfiguracja pierwotna<br />
A', B', C', D' – konfiguracja aktualna<br />
Rys. 12.12. Opis materialny i opis przestrzenny.<br />
Jeżeli przemieszczenia u i będą małe to pochodne przemieszczeń także będą małe a iloczyny pochodnych<br />
przemieszczeń będą wielkością małą wyższego rzędu i mogą zostać pominięte. Tensor Lagrange'a będzie miał<br />
postać<br />
L ij<br />
= 1 2 ⋅ ∂ u i<br />
∂ u <br />
j<br />
∂ x j<br />
∂ x . (12.162)<br />
i<br />
Tensor Eulera będzie miał postać<br />
E ij<br />
= 1 2 ⋅ ∂ u i<br />
∂ u <br />
j<br />
∂ j<br />
∂ . (12.163)<br />
i<br />
Ponadto, gdy przemieszczenia są małe to różnica pomiędzy współrzędnymi x i i x i będzie pomijalnie mała.<br />
Można przyjąć więc, że<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 35<br />
x i<br />
≃ i<br />
, (12.164)<br />
co daje w rezultacie tylko jeden tensor małych odkształceń, który ma postać<br />
L ij<br />
= E ij<br />
= ij<br />
= 1 2 ⋅ ∂ u i<br />
∂ u <br />
j<br />
∂ x j<br />
∂ x . (12.165)<br />
i<br />
Równanie (12.165) jest identyczne z równaniem geometrycznym Cauchy'ego (12.35).<br />
12.9 Równania nierozdzielności odkształceń<br />
W równaniach geometrycznych (12.35) lub (12.165) trzy funkcje przemieszczeń u i x 1<br />
, x 2<br />
, x 3 <br />
opisujące pole przemieszczeń służą do obliczenia sześciu funkcji ij x 1<br />
, x 2<br />
, x 3 <br />
odkształceń. Wynika stąd wniosek, że funkcje ij x 1<br />
, x 2<br />
, x 3 <br />
spełniać jeszcze trzy dodatkowe warunki.<br />
opisujących pole<br />
nie mogą być zupełnie dowolne. Powinny one<br />
Chcąc wyznaczyć te trzy dodatkowe równania należy równanie (12.35) zróżniczkować dwa razy i zamienić<br />
kolejne wskaźniki. W efekcie można otrzymać<br />
ij , kl<br />
= 1 2 ⋅ u i , jkl<br />
u j ,ikl <br />
kl ,ij<br />
= 1 2 ⋅ u k ,lij<br />
u l , kij <br />
ik , jl<br />
= 1 2 ⋅ u i , kjl<br />
u k ,ijl <br />
. (12.166)<br />
jl ,ik<br />
= 1 2 ⋅ u j , lik<br />
u l , jik <br />
Następnie dwa pierwsze równania dodajemy stronami, a pozostałe równania odejmujemy. W wyniku tego<br />
można otrzymać<br />
ij.kl<br />
kl ,ij<br />
− ik , jl<br />
− jl ,ik<br />
= 1 2 ⋅ u i , jkl<br />
u j ,ikl 1 2 ⋅ u k , lij<br />
u l , kij <br />
− 1 2 ⋅ u i , kjl<br />
u k ,ijl − 1 2 ⋅ u j , lik<br />
u l , jik <br />
, (12.167)<br />
które będzie miało postać<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 36<br />
ij.kl<br />
kl ,ij<br />
− ik , jl<br />
− jl ,ik<br />
= 1 2 ⋅ u i , jkl<br />
u j ,ikl<br />
u k ,lij<br />
u l , kij<br />
−u i , kjl<br />
−u k ,ijl<br />
−u j , lik<br />
−u l , jik <br />
. (12.168)<br />
Grupując składniki podobne równanie (12.168) będzie miało postać<br />
ij.kl<br />
kl ,ij<br />
− ik , jl<br />
− jl ,ik<br />
= 1 2 ⋅ u i , jkl<br />
−u i , kjl<br />
u j ,ikl<br />
−u j ,lik<br />
u k , lij<br />
−u k ,ijl<br />
u l , kij<br />
−u l , jik <br />
. (12.169)<br />
W przypadku funkcji ciągłych jakimi są funkcje przemieszczeń różniczkowanie cząstkowe nie zależy od<br />
kolejności różniczkowania czyli można napisać<br />
u i , jkl<br />
=u i , kjl<br />
u j ,ikl<br />
=u j , lik<br />
u k , lij<br />
=u k , ijl<br />
u l , kij<br />
=u l , jik<br />
. (12.170)<br />
Podstawiając wzór (12.170) do (12.169) otrzymano<br />
ij.kl<br />
kl ,ij<br />
− ik , jl<br />
− jl ,ik<br />
=0 . (12.171)<br />
Równanie to nazywa się równaniem nierozdzielności odkształceń. Wzór (12.171) oznacza 3 4 czyli 81<br />
równań. Z analizy permutacji wskaźników wynika, że tylko sześć z nich będzie niezależnych.<br />
Dla i=k=1, j=l=2 równanie (12.171) będzie miało postać<br />
2⋅ 12,12<br />
− 11,22<br />
− 22,11<br />
=0 . (12.172)<br />
Dla i=k=2, j=l=3 równanie (12.171) będzie miało postać<br />
2⋅ 23,23<br />
− 22,33<br />
− 33,22<br />
=0 . (12.173)<br />
Dla i=k=3, j=l=1 równanie (12.171) będzie miało postać<br />
2⋅ 31,31<br />
− 33,11<br />
− 11,33<br />
=0 . (12.174)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 37<br />
Dla i=j=1, k=2, l=3 równanie (12.171) będzie miało postać<br />
11,23<br />
23,11<br />
− 12,13<br />
− 13,12<br />
=0 . (12.175)<br />
Dla i=j=2, k=3, l=1 równanie (12.171) będzie miało postać<br />
22,31<br />
31,22<br />
− 23,21<br />
− 21,23<br />
=0 . (12.176)<br />
Dla i=j=3, k=1, l=2 równanie (12.171) będzie miało postać<br />
33,12<br />
12,33<br />
− 31,32<br />
− 32,31<br />
=0 . (12.177)<br />
Wprowadzając symbol permutacyjny (10.35) wzór (12.171) można inaczej zapisać jako<br />
ij<br />
= ji<br />
=e ikm<br />
⋅e jln<br />
⋅ kl , mn<br />
=0 . (12.178)<br />
Tensor h ij nazywa się tensorem niespójności. Równania nierozdzielności można także przedstawić w formie<br />
macierzowej<br />
ij<br />
=[ 11<br />
12<br />
13<br />
21<br />
22<br />
23<br />
31<br />
32<br />
33]=0 . (12.179)<br />
Współrzędne równowskaźnikowe oznaczają równania (12.172), (12.173) i (12.174). Współrzędne<br />
różnowskaźnikowe oznaczają równania (12.175), (12.176) i (12.177).<br />
Spełnienie równań (12.171) oznacza, że ośrodek, który był ciągły przed odkształceniem jest także ciągły po<br />
odkształceniu. Każdemu punktowi materialnemu w konfiguracji pierwotnej odpowiada dokładnie jeden punkt<br />
w konfiguracji aktualnej (po odkształceniu). W materiale nie powstaną więc dziury ani elementarne<br />
prostopadłościany nie będą na siebie nachodzić.<br />
Na początku tego punktu stwierdzono, że potrzeba tylko trzech dodatkowych równań, a tymczasem z<br />
równania (12.171) wynika, że jest ich sześć. Okazuje się, że współrzędne tensora niespójności h ij nie są<br />
niezależne. Wewnątrz ciała spełnione mogą być tylko równania odpowiadające tylko równowskaźnikowym lub<br />
różnowskaźnikowym współrzędnym tensora niespójności. Na powierzchni ciała muszą być już spełnione<br />
wszystkie równania czyli wszystkie współrzędne tensora niespójności muszą się równać zero.<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 38<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater
12. ANALIZA STANU ODKSZTAŁCENIA 39<br />
(12.1)<br />
Prof. dr hab. inż. Andrzej Garstecki<br />
Dr inż. Janusz Dębiński<br />
AlmaMater














