

Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
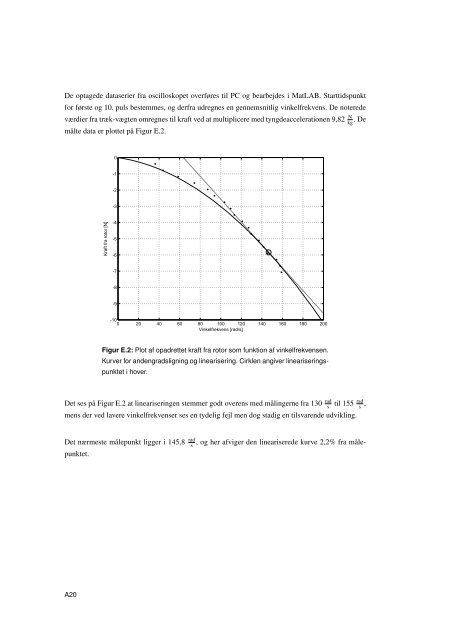
De optagede dataserier fra oscilloskopet overføres til PC og bearbejdes i MatLAB. Starttidspunkt<br />
for første og 10. puls bestemmes, og derfra udregnes en gennemsnitlig vinkelfrekvens. De noterede<br />
værdier fra træk-vægten omregnes til kr<strong>af</strong>t ved at multiplicere med tyngdeaccelerationen 9,82 N<br />
kg . De<br />
målte data er plottet på Figur E.2.<br />
Kr<strong>af</strong>t fra <strong>rotor</strong> [N]<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
-5<br />
-6<br />
-7<br />
-8<br />
-9<br />
-10<br />
0 20 40 60 80 100 120 140 160 180 200<br />
Vinkelfrekvens [rad/s]<br />
Figur E.2: Plot <strong>af</strong> opadrettet kr<strong>af</strong>t fra <strong>rotor</strong> som funktion <strong>af</strong> vinkelfrekvensen.<br />
Kurver for andengradsligning og linearisering. Cirklen angiver lineariserings-<br />
punktet i hover.<br />
Det ses på Figur E.2 at lineariseringen stemmer godt overens med målingerne fra 130 rad<br />
s til 155 rad<br />
s ,<br />
mens der ved lavere vinkelfrekvenser ses en tydelig fejl men dog stadig en tilsvarende udvikling.<br />
Det nærmeste målepunkt ligger i 145,8 rad<br />
s , og her <strong>af</strong>viger den lineariserede kurve 2,2% fra målepunktet.<br />
A20














