- Page 1: el: Energieffektiv hi-fi-forstærke
- Page 5 and 6: Title: Control of Draganfly X-pro
- Page 7 and 8: Projektet er udarbejdet af: Alex Aa
- Page 9 and 10: III Systemdesign 46 9 Overordnet de
- Page 13 and 14: KAPITEL 1 Indledning Det er faldet
- Page 16 and 17: DEL I Systembeskrivelse Use cases g
- Page 18 and 19: KAPITEL 2 - Use-case analyse af sys
- Page 20 and 21: KAPITEL 2 - Use-case analyse af sys
- Page 22 and 23: KAPITEL 3 Afgrænsning Det vælges
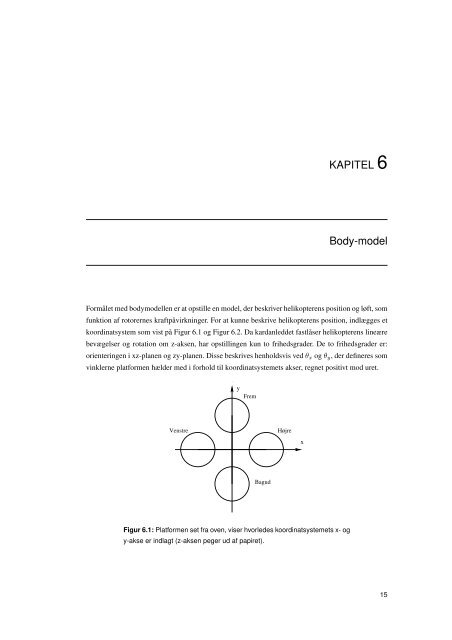
- Page 24 and 25: DEL II Modellering Gennem opstillel
- Page 28 and 29: KAPITEL 6 - Body-model Venstre MC z
- Page 30 and 31: KAPITEL 6 - Body-model Da alle mome
- Page 32 and 33: KAPITEL 6 - Body-model 6.4 Verifika
- Page 34 and 35: KAPITEL 7 - Rotormodel På Figur 7.
- Page 36 and 37: KAPITEL 7 - Rotormodel Figur 7.4: A
- Page 38 and 39: KAPITEL 7 - Rotormodel 7.2.1 Løfte
- Page 40 and 41: KAPITEL 7 - Rotormodel Omskrivninge
- Page 42 and 43: KAPITEL 7 - Rotormodel Det første
- Page 44 and 45: KAPITEL 7 - Rotormodel Kraft fra ro
- Page 46 and 47: KAPITEL 8 Motormodel Følgende kapi
- Page 48 and 49: KAPITEL 8 - Motormodel kædereglen,
- Page 50 and 51: KAPITEL 8 - Motormodel Den interne
- Page 52 and 53: KAPITEL 8 - Motormodel 8.3 Samlet M
- Page 54 and 55: KAPITEL 8 - Motormodel M(s) = ωg(s
- Page 56 and 57: KAPITEL 8 - Motormodel Current [A]
- Page 58 and 59: DEL III Systemdesign Der skal udtæ
- Page 60 and 61: KAPITEL 9 - Overordnet design Som d
- Page 62 and 63: KAPITEL 9 - Overordnet design PC. D
- Page 64 and 65: KAPITEL 10 - Blokbeskrivelse fra de
- Page 66: KAPITEL 10 - Blokbeskrivelse 10.5.2
- Page 69 and 70: KAPITEL 11 Motorregulering For at s
- Page 71 and 72: Ts,min = 2π 2ωr,min = KAPITEL 11
- Page 73 and 74: forstærkningen for kontrolløkken
- Page 75 and 76: KAPITEL 11 - Motorregulering design
- Page 77 and 78:
12.1.1 Antal pulser per sample KAPI
- Page 79 and 80:
KAPITEL 13 Vinkelregulator Som besk
- Page 81 and 82:
13.2 Regulatordesign KAPITEL 13 - V
- Page 83 and 84:
KAPITEL 13 - Vinkelregulator Da det
- Page 85 and 86:
Im 6 4 2 0 -2 -4 -6 n 1 KAPITEL 13
- Page 88 and 89:
DEL V Implementering De enkelte blo
- Page 90 and 91:
KAPITEL 15 - Motorregulering højer
- Page 92 and 93:
KAPITEL 15 - Motorregulering max mi
- Page 94 and 95:
KAPITEL 16 - Rotationssensor 82 n+1
- Page 96 and 97:
KAPITEL 16 - Rotationssensor tick_t
- Page 98 and 99:
KAPITEL 17 - Vinkelregulator Da det
- Page 100 and 101:
DEL VI Evaluering Et system, der ov
- Page 102 and 103:
KAPITEL 18 - Accepttest en motorreg
- Page 104 and 105:
KAPITEL 18 - Accepttest 18.3 Opreth
- Page 106 and 107:
KAPITEL 19 - Konklusion ventet, eft
- Page 108:
[Pedersen, 2007] Pedersen, T. S. (2
- Page 112 and 113:
APPENDIKS A Motordriver Fra process
- Page 114 and 115:
A.1.2 MOSFET driver Selv om der, i
- Page 116 and 117:
undersøgt. Den vil typisk beskrive
- Page 118 and 119:
APPENDIKS C Accepttest specifikatio
- Page 120 and 121:
Hver af de 11 datasæt fra målinge
- Page 122 and 123:
Operatører: Andreas Corneliussen S
- Page 124 and 125:
D.4 Målemetode Målingerne er lave
- Page 126 and 127:
A16 Vinkel [°] Vinkel [°] −5
- Page 128 and 129:
Operatører: Erik Poulsen og Jesper
- Page 130 and 131:
De optagede dataserier fra oscillos
- Page 132 and 133:
afstand på D fra denne givet ved F
- Page 134 and 135:
Ved at isolere for mcarm og indsæt
- Page 136 and 137:
F.3.5 Forsøgsresultater De opsamle
- Page 138 and 139:
Herefter benyttes MatLAB’s indbyg
- Page 140 and 141:
G.3 Måleopstilling Til at måle vi
- Page 142 and 143:
H.2 Apparaturliste H.3 Måleopstill
- Page 144 and 145:
Operatør: Alex B og Brian M Adress
- Page 146 and 147:
Vs + − Fluke 189 V_fluke V R_fluk
- Page 148 and 149:
APPENDIKS J AvrX I det følgende vi
- Page 150 and 151:
eksekvere kode. Til sidst skal time
- Page 152 and 153:
void AvrXResetSemaphore(pMutex fjer
- Page 154 and 155:
23 } 24 25 26 / ∗ ∗∗∗∗∗
- Page 156 and 157:
60 61 62 / ∗ ∗∗∗∗∗∗
- Page 158 and 159:
61 E p i l o g ( ) ; / / S k i f t
- Page 160 and 161:
5 # d e f i n e START_DELAY 30 6 7
- Page 162 and 163:
10 # d e f i n e VINKELSENSOR_VOLT_
- Page 164:
K.6 rs232.c 1 # i n c l u d e " Mai