

Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Im<br />
6<br />
4<br />
2<br />
0<br />
-2<br />
-4<br />
-6<br />
n 1<br />
KAPITEL 13 - Vinkelregulator<br />
Root locus<br />
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 1<br />
Re<br />
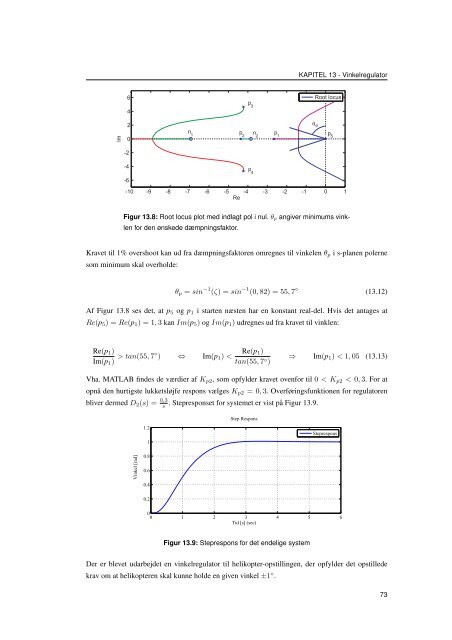
Figur 13.8: Root locus plot med indlagt pol i nul. θp angiver minimums vink-<br />
len for den ønskede dæmpningsfaktor.<br />
Kravet til 1% overshoot kan ud fra dæmpningsfaktoren omregnes til vinkelen θp i s-planen polerne<br />
som minimum skal overholde:<br />
θp = sin −1 (ζ) = sin −1 (0, 82) = 55, 7 ◦<br />
p 2<br />
p 3<br />
p 4<br />
n 2<br />
p 1<br />
p<br />
p 5<br />
(13.12)<br />
Af Figur 13.8 ses det, at p5 og p1 i starten næsten har en konstant real-del. Hvis det antages at<br />
Re(p5) = Re(p1) = 1, 3 kan Im(p5) og Im(p1) udregnes ud fra kravet til vinklen:<br />
Re(p1)<br />
Im(p1) > tan(55, 7◦ ) ⇔ Im(p1) < Re(p1)<br />
tan(55, 7 ◦ )<br />
⇒ Im(p1) < 1, 05 (13.13)<br />
Vha. MATLAB findes de værdier <strong>af</strong> Kp2, som opfylder kravet ovenfor til 0 < Kp2 < 0, 3. For at<br />
opnå den hurtigste lukketsløjfe respons vælges Kp2 = 0, 3. Overføringsfunktionen for regulatoren<br />
bliver dermed D2(s) = 0,3<br />
s . Stepresponset for systemet er vist på Figur 13.9.<br />
Vinkel [rad]<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
Step Respons<br />
Steprespons<br />
0<br />
0 1 2 3<br />
Tid [s] (sec)<br />
4 5 6<br />
Figur 13.9: Steprespons for det endelige system<br />
Der er blevet udarbejdet en vinkelregulator til <strong>helikopter</strong>-opstillingen, der opfylder det opstillede<br />
krav om at <strong>helikopter</strong>en skal kunne holde en given vinkel ±1 ◦ .<br />
73














