

Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
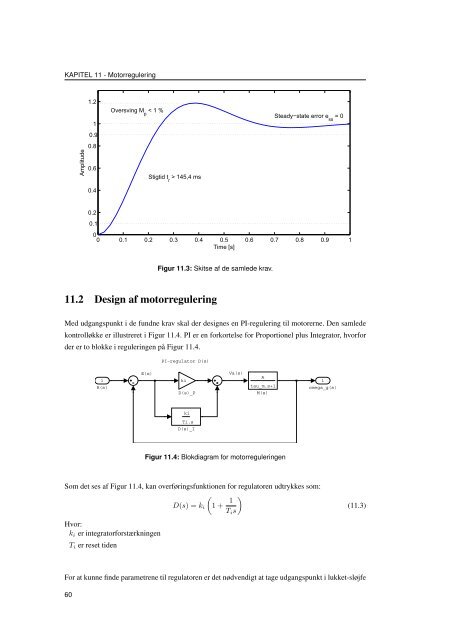
KAPITEL 11 - Motorregulering<br />
Amplitude<br />
1.2<br />
1<br />
0.9<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0.1<br />
Oversving M p < 1 %<br />
Stigtid t r > 145,4 ms<br />
Steady−state error e ss = 0<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5<br />
Time [s]<br />
0.6 0.7 0.8 0.9 1<br />
Figur 11.3: Skitse <strong>af</strong> de samlede krav.<br />
11.2 Design <strong>af</strong> motorregulering<br />
Med udgangspunkt i de fundne krav skal der designes en PI-regulering til motorerne. Den samlede<br />
kontrolløkke er illustreret i Figur 11.4. PI er en forkortelse for Proportionel plus Integrator, hvorfor<br />
der er to blokke i reguleringen på Figur 11.4.<br />
1<br />
R(s)<br />
E(s)<br />
PI−regulator D(s)<br />
ki<br />
D(s)_P<br />
ki<br />
Ti.s<br />
D(s)_I<br />
Va(s)<br />
A<br />
tau_m.s+1<br />
M(s)<br />
Figur 11.4: Blokdiagram for motorreguleringen<br />
Som det ses <strong>af</strong> Figur 11.4, kan overføringsfunktionen for regulatoren udtrykkes som:<br />
<br />
D(s) = ki 1 + 1<br />
<br />
Tis<br />
Hvor:<br />
ki er integratorforstærkningen<br />
Ti er reset tiden<br />
1<br />
omega_g(s)<br />
(11.3)<br />
For at kunne finde parametrene til regulatoren er det nødvendigt at tage udgangspunkt i lukket-sløjfe<br />
60














