

Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
KAPITEL 11 - Motorregulering<br />
11.1 Fastsættelse <strong>af</strong> krav<br />
Dynamik<br />
Kr<strong>af</strong>ten er proportional med <strong>rotor</strong>hastigheden, så en forøgelse i hastigheden på én motor medfører<br />
en tilsvarende nedgang i hastighed på den modsatte motor. I designet <strong>af</strong> reguleringen skal det derfor<br />
sikres, at stigtiden er den samme som faldtiden for motor, gear og <strong>rotor</strong>systemet. For at sætte krav til<br />
dynamikken på systemet vælges det, at sætte krav til stigtiden tr.<br />
Ses der på faldtiden for motoren, <strong>af</strong>hænger den udelukkende <strong>af</strong> friktionen og inertien i systemet.<br />
Da bl.a. Coulomb friktionen og belastningen fra <strong>rotor</strong>eren er ulineære, kan disse ikke udtrykkes vha.<br />
en overføringsfunktion. Som følge her<strong>af</strong>, er der opstillet en motormodel i Simulink, der kan findes på<br />
bilags-CD’en under /matlab/MotorGearRotorRiseTime/MotorGearRotorModel.mdl.<br />
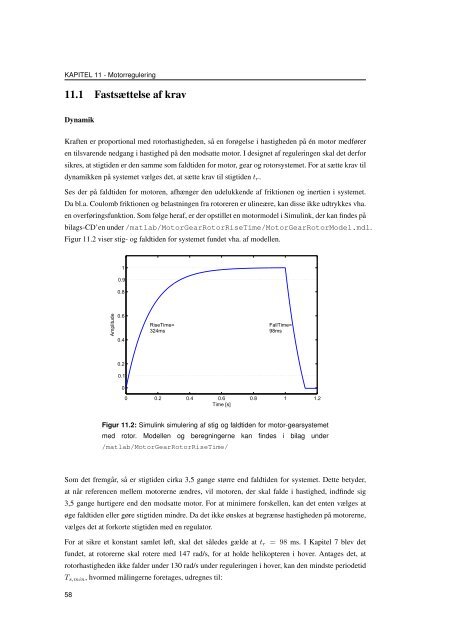
Figur 11.2 viser stig- og faldtiden for systemet fundet vha. <strong>af</strong> modellen.<br />
Amplitude<br />
1<br />
0.9<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0.1<br />
0<br />
RiseTime=<br />
324ms<br />
FallTime=<br />
98ms<br />
0 0.2 0.4 0.6<br />
Time [s]<br />
0.8 1 1.2<br />
Figur 11.2: Simulink simulering <strong>af</strong> stig og faldtiden for motor-gearsystemet<br />
med <strong>rotor</strong>. Modellen og beregningerne kan findes i bilag under<br />
/matlab/MotorGearRotorRiseTime/<br />
Som det fremgår, så er stigtiden cirka 3,5 gange større end faldtiden for systemet. Dette betyder,<br />
at når referencen mellem motorerne ændres, vil motoren, der skal falde i hastighed, indfinde sig<br />
3,5 gange hurtigere end den modsatte motor. For at minimere forskellen, kan det enten vælges at<br />
øge faldtiden eller gøre stigtiden mindre. Da det ikke ønskes at begrænse hastigheden på motorerne,<br />
vælges det at forkorte stigtiden med en regulator.<br />
For at sikre et konstant samlet løft, skal det således gælde at tr = 98 ms. I Kapitel 7 blev det<br />
fundet, at <strong>rotor</strong>erne skal rotere med 147 rad/s, for at holde <strong>helikopter</strong>en i hover. Antages det, at<br />
<strong>rotor</strong>hastigheden ikke falder under 130 rad/s under reguleringen i hover, kan den mindste periodetid<br />
Ts,min, hvormed målingerne foretages, udregnes til:<br />
58














