

Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet
Regulering af Quad-rotor helikopter - VBN - Aalborg Universitet

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
KAPITEL 13 - Vinkelregulator<br />
V<br />
a,h<br />
M (s)<br />
h<br />
Va,v<br />
M (s)<br />
v<br />
R (s)<br />
h<br />
R (s)<br />
v<br />
+ −<br />
B(s) θ out<br />
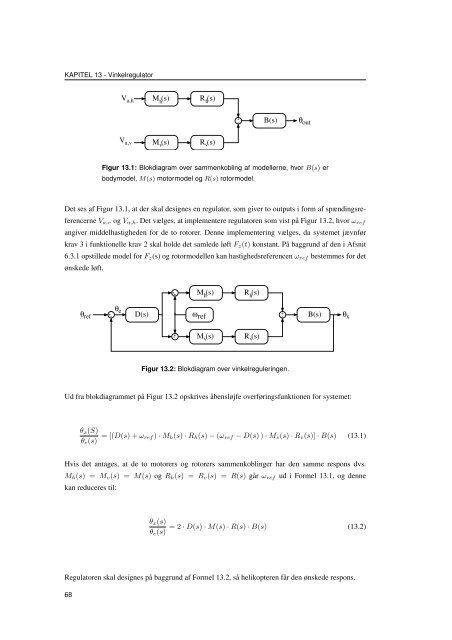
Figur 13.1: Blokdiagram over sammenkobling <strong>af</strong> modellerne, hvor B(s) er<br />
bodymodel, M(s) motormodel og R(s) <strong>rotor</strong>model.<br />
Det ses <strong>af</strong> Figur 13.1, at der skal designes en regulator, som giver to outputs i form <strong>af</strong> spændingsre-<br />
ferencerne Va,v og Va,h. Det vælges, at implementere regulatoren som vist på Figur 13.2, hvor ωref<br />
angiver middelhastigheden for de to <strong>rotor</strong>er. Denne implementering vælges, da systemet jævnfør<br />
krav 3 i funktionelle krav 2 skal holde det samlede løft Fz(t) konstant. På baggrund <strong>af</strong> den i Afsnit<br />
6.3.1 opstillede model for Fz(s) og <strong>rotor</strong>modellen kan hastighedsreferencen ωref bestemmes for det<br />
ønskede løft.<br />
θ ref<br />
+ −<br />
θ e<br />
D(s)<br />
+ +<br />
−<br />
+<br />
M (s)<br />
h<br />
ωref<br />
M (s)<br />
v<br />
R (s)<br />
h<br />
R (s)<br />
v<br />
Figur 13.2: Blokdiagram over vinkelreguleringen.<br />
+<br />
− B(s) θx<br />
Ud fra blokdiagrammet på Figur 13.2 opskrives åbensløjfe overføringsfunktionen for systemet:<br />
θx(S)<br />
θe(s) = [(D(s) + ωref ) · Mh(s) · Rh(s) − (ωref − D(s) ) · Mv(s) · Rv(s)] · B(s) (13.1)<br />
Hvis det antages, at de to motorers og <strong>rotor</strong>ers sammenkoblinger har den samme respons dvs.<br />
Mh(s) = Mv(s) = M(s) og Rh(s) = Rv(s) = R(s) går ωref ud i Formel 13.1, og denne<br />
kan reduceres til:<br />
θx(s)<br />
= 2 · D(s) · M(s) · R(s) · B(s) (13.2)<br />
θe(s)<br />
Regulatoren skal designes på baggrund <strong>af</strong> Formel 13.2, så <strong>helikopter</strong>en får den ønskede respons.<br />
68














