13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
30 KINEMATIK EINES MASSENPUNKTES<br />
nannte Trägheitsgesetz) <strong>und</strong> insbeson<strong>der</strong>e durch Newton (1643–1727) entwickelt.<br />
Newton fasste alle Erfahrungen <strong>der</strong> damaligen Zeit in drei axiomatischen<br />
Gesetzen zusammen, die heute noch in unverän<strong>der</strong>ter Form als Newtonsche<br />
Gr<strong>und</strong>gesetze Ausgangspunkt <strong>der</strong> Kinetik sind.<br />
In den nachfolgenden Kapiteln wird zunächst die Kinematik <strong>und</strong> <strong>Dynamik</strong> eines Massenpunktes<br />
untersucht. Insbeson<strong>der</strong>e werden hier auch Lösungshilfen wie <strong>der</strong> Arbeitssatz<br />
o<strong>der</strong> Energiesatz exemplarisch erläutert.<br />
Danach werden Massenpunktsysteme betrachtet <strong>und</strong> anschließend starre Körper. Damit<br />
lässt sich die <strong>Dynamik</strong> sogenannter allgemeiner Mehrkörpersysteme vollständig<br />
beschreiben.<br />
Spezielle dynamische Vorgänge wie Stoß o<strong>der</strong> Schwingungen mit einem o<strong>der</strong> mehreren<br />
Freiheitsgraden werden am Ende des Semesters untersucht.<br />
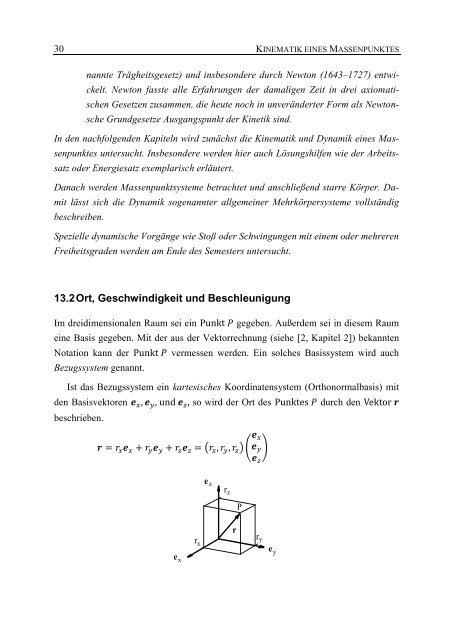
13.2 Ort, Geschwindigkeit <strong>und</strong> Beschleunigung<br />
Im dreidimensionalen Raum sei ein gegeben. Außerdem sei in diesem Raum<br />
eine Basis gegeben. Mit <strong>der</strong> aus <strong>der</strong> Vektorrechnung (siehe [2, Kapitel 2]) bekannten<br />
Notation kann <strong>der</strong> vermessen werden. Ein solches Basissystem wird auch<br />
Bezugssystem genannt.<br />
Ist das Bezugssystem ein kartesisches Koordinatensystem (Orthonormalbasis) mit<br />
den Basisvektoren so wird <strong>der</strong> Ort des durch den<br />
beschrieben.<br />
e<br />
z<br />
r<br />
z<br />
P<br />
e<br />
x<br />
r<br />
x<br />
r<br />
r<br />
y<br />
e<br />
y