13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
32 KINEMATIK EINES MASSENPUNKTES<br />
e<br />
z<br />
e<br />
z<br />
r(t)<br />
r<br />
r(t+ t)<br />
P<br />
r(t)<br />
P<br />
v(t)<br />
e<br />
x<br />
e<br />
y<br />
e<br />
x<br />
e<br />
y<br />
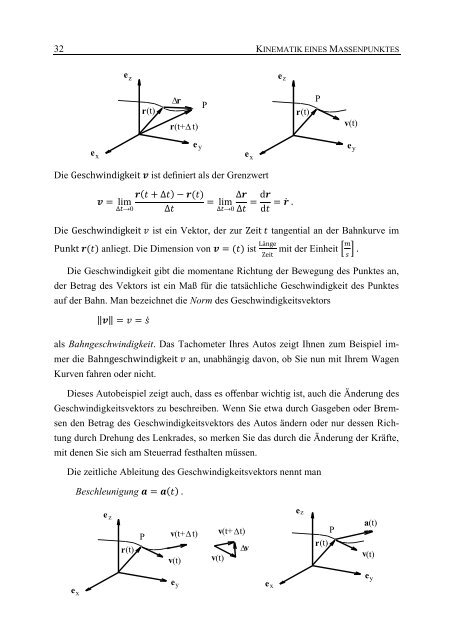
Die<br />
ist definiert als <strong>der</strong> Grenzwert<br />
Die ist ein Vektor, <strong>der</strong> zur tangential an <strong>der</strong> Bahnkurve im<br />
anliegt. Die Dimension von ist mit <strong>der</strong> Einheit<br />
Die Geschwindigkeit gibt die momentane Richtung <strong>der</strong> Bewegung des Punktes an,<br />
<strong>der</strong> Betrag des Vektors ist ein Maß für die tatsächliche Geschwindigkeit des Punktes<br />
auf <strong>der</strong> Bahn. Man bezeichnet die Norm des Geschwindigkeitsvektors<br />
als Bahngeschwindigkeit. Das Tachometer Ihres Autos zeigt Ihnen zum Beispiel immer<br />
die<br />
an, unabhängig davon, ob Sie nun mit Ihrem Wagen<br />
Kurven fahren o<strong>der</strong> nicht.<br />
Dieses Autobeispiel zeigt auch, dass es offenbar wichtig ist, auch die Än<strong>der</strong>ung des<br />
Geschwindigkeitsvektors zu beschreiben. Wenn Sie etwa durch Gasgeben o<strong>der</strong> Bremsen<br />
den Betrag des Geschwindigkeitsvektors des Autos än<strong>der</strong>n o<strong>der</strong> nur dessen Richtung<br />
durch Drehung des Lenkrades, so merken Sie das durch die Än<strong>der</strong>ung <strong>der</strong> Kräfte,<br />
mit denen Sie sich am Steuerrad festhalten müssen.<br />
Die zeitliche Ableitung des Geschwindigkeitsvektors nennt man<br />
Beschleunigung<br />
e<br />
z<br />
r(t)<br />
P<br />
v(t+ t) v(t+ t)<br />
v<br />
v(t) v(t)<br />
e<br />
z<br />
r(t)<br />
P<br />
a(t)<br />
v(t)<br />
e<br />
x<br />
e<br />
y<br />
e<br />
x<br />
e<br />
y