13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...
13.1 Zur Einteilung der Mechanik - Institut für Dynamik und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
58 KINEMATIK EINES MASSENPUNKTES<br />
denn die Zeitableitung <strong>der</strong> Inertialbasisvektoren ist immer identisch Null.<br />
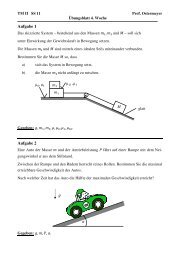
Lassen Sie uns annehmen, dass wir noch ein bewegtes Basissystem im Raum haben.<br />
Denken Sie etwa an ein Koordinatensystem, das an einem starren Körper festgemacht<br />
ist, <strong>der</strong> sich im Raum bewegt.<br />
e<br />
3<br />
P<br />
r P<br />
e<br />
O<br />
1 2<br />
e<br />
r OO'<br />
r' P<br />
O'<br />
e<br />
z<br />
Das zweite Basissystem habe den Ursprungspunkt <strong>und</strong> die Basisvektoren<br />
. Diese Basis soll genau so wie die Inertialbasis ein orthonormales, in<br />
diesem Fall ein kartesisches System sein. Das Tupel dieser Basisvektoren sei mit<br />
gekennzeichnet:<br />
e x<br />
e<br />
y<br />
Der Ort des Punktes<br />
kann nun ausgedrückt werden als Vektorsumme<br />
Je<strong>der</strong> dieser Vektoren kann in einem <strong>der</strong> beiden Basissysteme dargestellt werden. Üblicherweise<br />
wird man die Vektoren in dem jeweils bequemsten Basissystem darstellen.<br />
Um eine Beziehung zwischen den Koeffizienten in den unterschiedlichen Basissystemen<br />
zu bekommen, muss man die Basistransformation von nach kennen.<br />
Diese Basistransformation ist eine Matrix<br />
, die die Verdrehung <strong>der</strong> Basisvektoren<br />
von <strong>und</strong> kennzeichnet (siehe [2, Kapitel 2]). Diese Matrix ist eine orthogonale<br />
Matrix mit <strong>der</strong> Eigenschaft: