Stoffzusammenfassung: Analysis 1 & 2 - jkrieger.de
Stoffzusammenfassung: Analysis 1 & 2 - jkrieger.de
Stoffzusammenfassung: Analysis 1 & 2 - jkrieger.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Stoffzusammenfassung</strong>:<br />
<strong>Analysis</strong> 1 & 2<br />
Jan Krieger<br />
28. September 2004<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 1 –
INHALTSVERZEICHNIS<br />
1 Grundlagen 4<br />
1.1 Mathematische Symbole und grundlegen<strong>de</strong> Definitionen . . . . . . . . . . . . . . . 4<br />
1.2 Äquivalenzrelationen und -klassen . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
1.3 Normen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
1.4 Matritzen und Matrixnormen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
1.5 Intervallschachtelungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
1.6 Eigenschaften von Teilmengen <strong>de</strong>s K und <strong>de</strong>s K n . . . . . . . . . . . . . . . . . . . 9<br />
I <strong>Analysis</strong> 1: <strong>Analysis</strong> <strong>de</strong>s K 13<br />
2 Folgen 14<br />
2.1 Definition & Konvergenzbegriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.2 Beschränkung und Häufungspunkte . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
2.3 Monotonie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
3 Reihen 17<br />
3.1 Definitionen und Konvergenzbegriffe . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
3.2 Konvergenzkriterien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
3.3 Exponentialreihe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
3.4 Doppelreihen, Produktsätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21<br />
4 Funktionen 22<br />
4.1 Grundlegen<strong>de</strong> Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
4.2 Stetigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23<br />
4.3 Konvergenz von Funktionenfolgen . . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
4.4 Der Funktionenraum C[a, b] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
5 Differentiation 27<br />
5.1 Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
5.2 Mittelwertsätze und Extremalbedingungen . . . . . . . . . . . . . . . . . . . . . . . 28<br />
5.3 TAYLOR-Entwicklungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
5.4 NEWTON-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31<br />
5.5 Differentiation und Grenzprozesse . . . . . . . . . . . . . . . . . . . . . . . . . . . 32<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 1 –
INHALTSVERZEICHNIS<br />
INHALTSVERZEICHNIS<br />
6 Integration im R 34<br />
6.1 Das RIEMANN-Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
6.1.1 Herleitung und Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
6.1.2 Integrabilitätskriterien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35<br />
6.1.3 Eigenschaften <strong>de</strong>s RIEMANN-Integrals . . . . . . . . . . . . . . . . . . . . 37<br />
6.1.4 Das unbestimmte RIEMANN-Integral . . . . . . . . . . . . . . . . . . . . . 37<br />
6.1.5 Berechnung von Integralen . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
6.1.6 Kurvenlängen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39<br />
6.2 Mittelwertsätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
6.3 Uneigentliche Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41<br />
6.4 Integration und Grenzprozesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42<br />
7 FOURIER-<strong>Analysis</strong> 43<br />
7.1 Der Funktionenraum R[a, b] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43<br />
7.2 FOURIER-Entwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44<br />
II <strong>Analysis</strong> 2: <strong>Analysis</strong> <strong>de</strong>s K n 47<br />
8 Der n-dimensionale Zahlenraum K n 48<br />
8.1 Der euklidische Raum K n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48<br />
8.2 Lineare Abbildungen auf <strong>de</strong>m K n . . . . . . . . . . . . . . . . . . . . . . . . . . . 49<br />
9 Funktionen mehrerer Verän<strong>de</strong>rlicher 50<br />
9.1 Stetigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50<br />
9.2 Vektor- und Matrixwertige Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 51<br />
9.2.1 Vektorwertige Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . 51<br />
9.2.2 Matrixfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53<br />
10 Differenzierbare Funktionen im K n 54<br />
10.1 Partielle Ableitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54<br />
10.1.1 Begriffs<strong>de</strong>finition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54<br />
10.1.2 Begriffe <strong>de</strong>r Vektoranalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
10.1.3 Totale Differenzierbarkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . 56<br />
10.1.4 Mittelwertsätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58<br />
10.2 TAYLOR-Entwicklung im R n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59<br />
10.3 Satz über implizite Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60<br />
10.4 Reguläre/umkehrbare Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
10.5 Extremwertaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
10.5.1 Lokale Extrema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
10.5.2 Extremwertaufgaben mit Nebenbedingungen . . . . . . . . . . . . . . . . . 63<br />
11 Kurven- Flächen- und Volumenintegrale 66<br />
11.1 Inhaltsmessung von Mengen <strong>de</strong>s R n . . . . . . . . . . . . . . . . . . . . . . . . . . 66<br />
11.1.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66<br />
11.1.2 JORDAN-Inhalt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67<br />
11.1.3 Würfelsummen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69<br />
11.1.4 Abbildungen von Mengen . . . . . . . . . . . . . . . . . . . . . . . . . . . 69<br />
11.2 Das RIEMANN-Integral im R n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 2 –
INHALTSVERZEICHNIS<br />
INHALTSVERZEICHNIS<br />
11.2.1 Definition und Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . 71<br />
11.2.2 Schranken- und Mittelwertsätze . . . . . . . . . . . . . . . . . . . . . . . . 73<br />
11.2.3 Zusammenhang zwischen RIEMANN-Integral und JORDAN-Inhalt . . . . . . 73<br />
11.2.4 Vertauschung von Grenzprozessen . . . . . . . . . . . . . . . . . . . . . . . 74<br />
11.2.5 Satz von FUBINI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74<br />
11.2.6 Integraltransformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75<br />
11.2.7 Uneigentliches RIEMANN-Integral . . . . . . . . . . . . . . . . . . . . . . . 76<br />
11.3 Parameterabhängige Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 3 –
KAPITEL 1<br />
Grundlagen<br />
1.1 Mathematische Symbole und grundlegen<strong>de</strong> Definitionen<br />
• KRONECKER-Symbol δ kl :<br />
δ kl :=<br />
{<br />
1, k = l<br />
0, k ≠ l<br />
• LANDAU-Symbole O(·), o(·): Seien f, g komplexe Funktionen in einer Umgebung von a (a =<br />
∞ ist erlaubt!), so schreibt man:<br />
f(x)<br />
f(x) = O(g(x)) für x → a, falls: lim<br />
x→a g(x) = A ≠ 0,<br />
A = const.<br />
und:<br />
f(x)<br />
f(x) = o(g(x)) für x → a, falls: lim<br />
x→a g(x) = 0.<br />
Anschaulich be<strong>de</strong>utet o(g), dass die Funktion f für x → a schneller gegen 0, als die Funktion<br />
g.<br />
Die Schreibweise O(g) be<strong>de</strong>utet anschaulich, dass sich die Funktion f, wie die Funktion g v<br />
erhält.<br />
Als Beispiel I betrachte man etwa <strong>de</strong>n Grenzübergang x → ∞, also das asymptotische Verhalten<br />
einer Funktion. Dann ist f(x) := 1<br />
x 2 = o ( 1<br />
x)<br />
, da lim<br />
umgekehrt f(x) := 1 ≠ o ( )<br />
1<br />
x x , da lim<br />
2<br />
gegen 0, als 1.<br />
x<br />
x→∞<br />
f(x)<br />
g(x) = lim<br />
x→∞<br />
x→∞<br />
1<br />
x 2 1<br />
x<br />
1<br />
= lim<br />
x→∞ x<br />
= 0. Allerdings ist<br />
x = ∞. Die Funktion<br />
1<br />
x 2 fällt also schneller<br />
Beispiel II: Nun betrachte man die Funktion f(x) = sin x bei Annäherung an <strong>de</strong>n Nullpunkt<br />
x → 0. Afgrund <strong>de</strong>r folgen<strong>de</strong>n Beziehung gilt dort sin x = O(x), also verhält sich <strong>de</strong>r Sinus<br />
am Nullounkt, wie die Funktion g(x) = x.<br />
sin x<br />
lim<br />
x→0 x = 1 ≠ 0.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 4 –
1.2. Äquivalenzrelationen und -klassen<br />
• charakteristische Funktion: Sei D irgen<strong>de</strong>ine Menge. Zu je<strong>de</strong>r Menge kann man eine charakteristische<br />
Funktion χ D <strong>de</strong>finieren:<br />
{<br />
1, x ∈ D<br />
χ D :=<br />
0, x /∈ D .<br />
Die partielle charakteristische Funktion ist 1 für alle x ∈ D und un<strong>de</strong>finiert sonst.<br />
1.2 Äquivalenzrelationen und -klassen<br />
• Definition: Äquivalenzrelationen und -klassen:<br />
Eine Äquivalenzrelation auf einer Menge A ist eine Beziehung zwischen zwei Elementen<br />
a, b ∈ A mit <strong>de</strong>n Eigenschaften:<br />
1. a ∼ a (Reflexivität)<br />
2. a ∼ b ⇒ b ∼ a (Symmetrie)<br />
3. a ∼ b, b ∼ c ⇒ a ∼ c (Transitivität)<br />
Eine Äquivalenzklasse [a] ist <strong>de</strong>finiert als die Menge:<br />
[a] := {x ∈ A |x ∼ a}<br />
• Satz: Je<strong>de</strong> Menge zerfällt vollständig in disjunkte Äquivalenzklassen.<br />
1.3 Normen<br />
• Definition:<br />
Sei V ein Vektorraum. Eine Norm ‖·‖ : V → R ist eine Abbildung mit folgen<strong>de</strong>n Eigenschaften<br />
(x, y ∈ V; α ∈ R):<br />
1. ‖x‖ ≥ 0 und ‖x‖ = 0 ⇔ x = 0 (Definitheit)<br />
2. ‖αx‖ = |α| · ‖x‖ (Homogenität)<br />
3. ‖x + y‖ ≤ ‖x‖ + ‖y‖ (Dreiecksungleichung)<br />
Ein Paar (V, ‖ · ‖) wird normierter Raum genannt<br />
• Normäquivalenz: Auf einem endlich dimensionalen Vektorraum K n sind alle Normen äquivalent<br />
zur euklidischen Norm, d.h.:<br />
Zu je<strong>de</strong>r Norm ‖ · ‖ gibt es positive Konstanten m, M > 0, mit <strong>de</strong>nen gilt:<br />
m ‖x‖ 2<br />
≤ ‖x‖ ≤ M ‖x‖ 2<br />
Als Beispiel dafür, dass die Normäquivalenz auf unendlich dimensionalen Vektorräumen nicht<br />
mehr gilt kann dienen: Wären alle Normen auf C[a, b] äquivalent, so müsste dieser Raum sowohl<br />
bzgl. <strong>de</strong>r Maximumsnorm, als auch bzgl. <strong>de</strong>r L 2 -Norm vollständig sein. Somit wür<strong>de</strong>n<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 5 –
1.3. Normen<br />
alle konvergenten Folgen von Funktionen f n → f gegen stetige Funktionen f ∈ C[a, b] konvergieren.<br />
Man betrachte die Funktionenfolge g n (x) := x n , die bzgl. <strong>de</strong>r L 2 -Norm auf C[0, 1]<br />
gegen die folgen<strong>de</strong> Funktion konvergiert:<br />
{<br />
0 x < 1<br />
g(x) =<br />
1 x = 1 .<br />
Die obige Funktion f ist aber sicher nicht stetig, also g /∈ C[0, 1]. Damit ist die Folge zwar konvergent,<br />
ihr Limes liegt aber nicht im Raum und C[0, 1] ist bzgl. dieser Norm nicht vollständig.<br />
• Beispiele für Normen auf <strong>de</strong>m K n :<br />
√<br />
n∑<br />
– euklidische Norm: ‖x‖ 2<br />
:= |x i | 2<br />
i=1<br />
– Maximums-Norm: ‖x‖ ∞<br />
:= max<br />
i=1,...,n |x i|<br />
∑<br />
– l 1 -Norm: ‖x‖ 1<br />
:= n |x i | p<br />
i=1<br />
( n<br />
) 1<br />
∑<br />
– l p -Norm: ‖x‖ p<br />
:= |x i | p p<br />
i=1<br />
• wichtige Ungleichungen:<br />
– ∣ ∣ ‖x‖ − ‖y‖<br />
∣ ∣ ≤ ‖x − y‖<br />
– BERNOULLI’sche Ungleichung: Für a ∈ R und a ≥ −1 gilt für beliebiges n ∈ N:<br />
(1 + a) n ≥ 1 + na<br />
– YOUNG’sche Ungleichung: Für p, q ∈ R mit 1 < p, q < ∞ und 1/p + 1/q = 1 gilt:<br />
|xy| ≤ |x|p<br />
p + |y|q<br />
q ,<br />
x, y ∈ K<br />
– HÖLDER’sche Ungleichung: Für das euklidische Skalarprodukt gilt für beliebige p, q ∈<br />
R mit 1 < p, q < ∞ und 1/p + 1/q = 1:<br />
|(x, y) 2 | ≤ ‖x‖ p · ‖y‖ q<br />
,<br />
x, y ∈ K n<br />
Diese Ungleichung gilt auch im Grenzfall p = 1, q = ∞.<br />
– MINKOWSKI’sche Ungleichung: Für beliebiges p ∈ R mit 1 ≤ p < ∞ sowie für p = ∞<br />
gilt:<br />
‖x + y‖ p<br />
≤ ‖x‖ p<br />
+ ‖y‖ p<br />
, x, y ∈ K n<br />
• Abstand/Metrik: Sei X irgend eine Menge. Eine Abbildung d(·, ·) : X × X → R heißt Metrik/Abstand<br />
(auf X), wenn folgen<strong>de</strong> Bedingungen erfüllt sind:<br />
M1 Definitheit: d(x, y) ≥ 0, d(x, y) = 0 ⇔ x = y<br />
M2 Symmetrie: d(x, y) = d(y, x)<br />
M3 Dreiecksungleichung: d(x, y) ≤ d(x, z) + d(z, y)<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 6 –
1.4. Matritzen und Matrixnormen<br />
Das Paar (X, d) wird metrischer Raum genannt.<br />
• Abstand zu einer Menge: Sei M ⊂ R n eine Menge. Man <strong>de</strong>finiert dann <strong>de</strong>n Abstand eines<br />
Punkte x ∈ R n zu M mit Hilfe <strong>de</strong>r Metrik d(a, b) als:<br />
dist(x, M) := inf {d(x, m) ∈ R |m ∈ M} .<br />
dist(x, M) ist also <strong>de</strong>r kleinste Abstand, von x zu einem Punkt m ∈ M <strong>de</strong>r Menge.<br />
1.4 Matritzen und Matrixnormen<br />
• Matrixnormen: Da man <strong>de</strong>n Raum K n×n <strong>de</strong>r n×n-Matrizen mit <strong>de</strong>m K 2n i<strong>de</strong>ntifizieren kann,<br />
so kann man auch Normen für Matrizen <strong>de</strong>finieren, für die alle gewöhnlichen Normeigenschaften<br />
gelten; insbeson<strong>de</strong>re auch die Normäquivalenz auf K n×n . Der Begriff <strong>de</strong>r Konvergenz wird<br />
dann komponentenweise erklärt.<br />
Natürliche Matrixnorm: Für eine beliebige Vektornorm ‖·‖ auf K n wird durch folgen<strong>de</strong> Setzung<br />
eine Matrixnorm erklärt:<br />
‖A‖ :=<br />
Für solche natürlich erzeugte Matrixnormen gilt:<br />
1. ‖E n ‖ = 1.<br />
‖Ax‖<br />
sup<br />
x∈K n \{0} ‖x‖ = sup ‖Ax‖<br />
x∈K n ,‖x‖=1<br />
2. ‖Ax‖<br />
} {{ }<br />
≤ ‖A‖<br />
}{{}<br />
· ‖x‖<br />
}{{}<br />
, x ∈ K n , A ∈ K n×n .<br />
Matrixnorm Matrixnorm Vektornorm<br />
3. ‖AB‖ ≤ ‖A‖ · ‖B‖ , A, B ∈ K n×n<br />
Nicht je<strong>de</strong> Matrisnorm ist auch natürlich. Für die FROBENIUS-Norm gelten nur die obigen<br />
Eigenschaften 1 und 2. Zusätzlich gilt ‖E n ‖ F<br />
= √ n. Sie ist <strong>de</strong>finiert durch:<br />
‖A‖ F<br />
:= √<br />
n∑<br />
|a j k| 2 .<br />
j,k=1<br />
• Natürliche Matrizennormen: Die natürlichen Matrizennormen zur Maximumsorm ‖·‖ ∞<br />
und<br />
zur l 1 -Norm ‖·‖ 1<br />
sind die sog. Maximale-Zeilensummen-Norm und die Maximale-Spaltensummen-<br />
Norm:<br />
‖A‖ ∞<br />
:= max<br />
1≤j≤n<br />
‖A‖ ∞<br />
:= max<br />
1≤k≤n<br />
n∑<br />
|a jk |<br />
k=1<br />
n∑<br />
|a jk |<br />
• Spektralnorm: Für hermite’sche Matrizen (A = t A) gilt für die Spektralnorm ‖·‖ 2<br />
:<br />
j=1<br />
‖A‖ 2<br />
= max {|λ| , λ Eigenwert von A}<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 7 –
1.4. Matritzen und Matrixnormen<br />
Für allgemeine Matrizen B ∈ K n×n gilt:<br />
{√ }<br />
‖B‖ 2<br />
= max |λ|, λ Eigenwert von t AA<br />
Zur Motivation <strong>de</strong>r Spektralnorm: Sei w ≠ 0 eine normierter Eigenvektor zum Eigenwert λ <strong>de</strong>r<br />
Matrix A ∈ K n×n , also:<br />
‖w‖ = 1 und A · w = λw.<br />
Damit erhält man folgen<strong>de</strong> Abschätzung:<br />
|λ| = |λ| · ‖w‖ = ‖A · w‖ ≤ ‖A‖ · ‖w‖ = ‖A‖ .<br />
Das be<strong>de</strong>utet, dass alle Eigenwerte auf einer Kreisscheibe um <strong>de</strong>n Nullpunkt in C liegen. Der<br />
Radius ist gera<strong>de</strong> ‖A‖. Damit erhält man:<br />
max |λ| ≤ ‖A‖ ∞ .<br />
λ ist EW<br />
• spezielle Matritzen aus K n×n :<br />
1. HERMITE’sche Matritzen: Eine Matrix A ∈ K n×n heißt hermite’sch, wenn gilt:<br />
A = t A.<br />
– Für hermite’sche Matritzen hat die Spektralnorm die spezielle Gestalt:<br />
‖A‖ 2<br />
= max {|λ|, λ Eigenwert von A}<br />
– Alle Eigenwerte einer hermite’schen Matrix sind reell.<br />
– Zu je<strong>de</strong>r hermite’schen Matrix A ∈ K n×n gibt es eine Orthonormalbasis von K n , die<br />
aus Eigenvektoren von A besteht. Außer<strong>de</strong>m gibt es eine unitäre Matrix S ∈ K n×n<br />
mit <strong>de</strong>r gilt (λ 1 , ..., λ n ∈ R Eigenwerte von A):<br />
⎛<br />
S −1 AS = t SAS =<br />
⎜<br />
⎝<br />
⎞<br />
λ 1 0<br />
. ..<br />
⎟<br />
⎠<br />
0 λ n<br />
2. orthogonale Matritzen: Eine Matrix A ∈ K n×n heißt orthogonal, wenn ihre Spaltenvektoren<br />
ein Orthogonalensystem bil<strong>de</strong>n. Es gilt:<br />
A −1 = t A.<br />
– Für alle Eigenwerte λ i ∈ C gilt: |λ i | = 1.<br />
3. unitäre Matritzen: Eine Matrix Q ∈ K n×n heißt unitär, wenn gilt:<br />
Q −1 = t Q.<br />
– Für alle Eigenwerte λ i ∈ C gilt: |λ i | = 1.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 8 –
1.5. Intervallschachtelungen<br />
– Zu je<strong>de</strong>r unitären Matrix Q ∈ K n×n gibt es eine unitäre Matrix S ∈ K n×n , so dass<br />
(λ 1 , ..., λ n ∈ R Eigenwerte von A):<br />
⎛ ⎞<br />
λ 1 0<br />
S −1 QS = t ⎜<br />
SQS = ⎝<br />
. ..<br />
⎟<br />
⎠<br />
0 λ n<br />
Die Matrix S besteht aus einer Basis von Eigenvektoren.<br />
– unitäre Matritzen Q, Q 1 , Q 2 ∈ K n×n sind insbeson<strong>de</strong>re regulär (voller Rang) und es<br />
gilt:<br />
‖Qx‖ = ‖Q‖ ⇒ ‖Q‖ = 1<br />
(<br />
Qx, Qy<br />
)<br />
2 = ( x, y ) 2 , x, y ∈ Kn .<br />
• Positiv Definit für Matrizen: Eine Matrix A ∈ K n×n heißt positiv <strong>de</strong>finit, wenn gilt:<br />
(Ax, x) 2 ∈ R, (Ax, x) 2 > 0 ∀x ∈ K n \{0}<br />
Eine hermite’sche Matrix ist genau dann positiv <strong>de</strong>finit, wenn alle ihre (reellen) Eigenwerte<br />
positiv sind.<br />
• Störungssatz: Die Matrix B ∈ K n×n habe die Norm ‖B‖ < 1. Dann ist die Matrix E n + B<br />
regulär und es gilt:<br />
∥ (En + B) −1∥ ∥ ≤<br />
1<br />
1 − ‖B‖<br />
• Sei A ∈ K n×n regulär und B ∈ K n×n mit ∥ ∥ A −1 B ∥ ∥ < 1. Dann ist auch A + B regulär<br />
1.5 Intervallschachtelungen<br />
• Definition:<br />
Eine Intervallschatelung ist eine Folge von (abgeschlossenen) Intervallen I n := [a n , b n ] mit:<br />
1. I n+1 ⊂ I n<br />
2. Zu je<strong>de</strong>m ɛ > 0 gibt es ein Intervall I n mit Länge |b n − a n | < ɛ.<br />
• Intervallschachtelungseigenschaft:<br />
Zu je<strong>de</strong>r Intervallschachtelung I n in R gibt es ein a ∈ R mit: a ∈ I n<br />
∀n ∈ N<br />
• Trennungseigenschaft <strong>de</strong>s R:<br />
Zu zwei Teilmengen A, B ⊂ R mit. a ≤ b, ∀a ∈ A, b ∈ B gibt es ein s ∈ R, dass a und B<br />
trennt, d.h. a ≤ s ≤ b, ∀a ∈ A, b ∈ B.<br />
Die Trennungeigenschaft ist zur Vollständigkeit von R äquivalent<br />
1.6 Eigenschaften von Teilmengen <strong>de</strong>s K und <strong>de</strong>s K n<br />
• Durchmesser einer Menge: Für Eine Menge M ⊂ K n ist ihr Durchmesser <strong>de</strong>finiert als:<br />
diam(M) := sup {‖x − y‖ 2<br />
, x, y ∈ M} .<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 9 –
1.6. Eigenschaften von Teilmengen <strong>de</strong>s K und <strong>de</strong>s K n<br />
• ɛ-Umgebungen/Kugelumgebung eines Punktes: Eine Epsilonumgebung U ɛ (x 0 ) für ein x 0 ∈<br />
D ⊂ K n mit <strong>de</strong>m Radius ɛ > 0 ist <strong>de</strong>finiert, als die offene Kreisscheibe:<br />
U ɛ (x 0 ) = K ɛ (x 0 ) := { x ∈ D ∣ ∣ ‖x − x0 ‖ < ɛ }<br />
• ɛ-Umgebung einer Menge: Als offene ɛ-Umgebung einer Menge M ⊂ R n bezeichnet man<br />
die Menge:<br />
U ɛ (M) := { x ∈ R n∣ ∣ dist(x, M) < ɛ<br />
}<br />
.<br />
• Sätz zu Umgebungen: Es gilt:<br />
1. Je<strong>de</strong> Obermenge einer Umgebung von a ∈ K n ist eine Umgebung von a.<br />
2. Der Durchschnitt zweier Umgebungen von a ∈ K n ist ebenfalls eine Umgeung von a.<br />
3. HAUSDORFF’sche Trennungseigenschaft: Zu je zwei verschie<strong>de</strong>nen Punkten a, b ∈ K n<br />
existieren disjunkte Umgebungen.<br />
• beschränkte Mengen:<br />
Eine Menge M ⊂ K heißt beschränkt, wenn es eine Zahl R > 0 gibt, sodass |z| ≤ R für fast<br />
alle z ∈ M.<br />
Eine Menge M ⊂ K n heißt beschränkt, wenn es eine Kugelumgebung K r (0) <strong>de</strong>s Nullpunktes<br />
gibt, die alle Elemente <strong>de</strong>r Menge enthält.<br />
• offene Mengen:<br />
Eine Menge heißt offen, wenn es zu je<strong>de</strong>m a ∈ O eine Kugelumgebung K ɛ (a) gibt, die in O<br />
enthalten ist.<br />
Dies be<strong>de</strong>utet, dass es keine sog. Randpunkte gibt, <strong>de</strong>ren Kugelumgebungen zum Teil in O und<br />
zum Teil imKomplement von O liegen.<br />
Lemma: Der Durchschnitt endlich vieler und die Vereinigung beliebig vieler offener Mengen<br />
ist offen.<br />
• abgeschlossene Mengen:<br />
Eine Menge M ⊂ K n heißt abgeschlossen, wenn sie die Granzwerte aller konvergenten Folgen<br />
(a n ) n∈N mit a n ∈ M enthält. Auch die leere Menge ∅ heißt abgeschlossen.<br />
Eine weitere Definition ist: Eine Menge A ⊂ K n heißt abgeschlossen, wenn ihr Komplement<br />
A c := K n \A offen ist.<br />
Beispiele: Die folgen<strong>de</strong>n Mengen sind abgeschlossen:<br />
1. die beran<strong>de</strong>te Kreisscheibe mit <strong>de</strong>m Radius r um a: K r (a) := { z ∈ C n∣ ∣‖z − a‖ ≤ r }<br />
2. Das CANTOR’sche Diskontinuum ist abgeschlossen, und sogar kompakt.<br />
3. Gegenbeispiel: Q ist nicht abgeschlossen, da z.B. die Folge a n = ( 1 + 1 n) 2<br />
∈ Q gegen<br />
die Eueler’sche Zahl e konvergiert und e /∈ Q. Damit gibt es Folgen in Q <strong>de</strong>ren Grenzwert<br />
nicht in Q liegt.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 10 –
1.6. Eigenschaften von Teilmengen <strong>de</strong>s K und <strong>de</strong>s K n<br />
Die Mengen ∅ und K n sind zugleich offen und abgeschlossen.<br />
Die diskrete Menge { 1<br />
n , n ∈ N} ist we<strong>de</strong>r offen noch abgeschlossen.<br />
Lemma: Die Vereinigung endlich vieler und <strong>de</strong>r Durchschnitt beliebig vieler abgeschlossener<br />
Mengen ist abgeschlossen.<br />
• Rand einer Menge: Ein Punkt a ∈ K n heißt Randpunkt einer Menge M ⊂ K n , wenn je<strong>de</strong><br />
Umgebung von a Punkte sowohl aus M, als auch aus <strong>de</strong>m Komplement M c := K n \M enthält.<br />
Die Menge aller Randpunkte aus M wir mit ∂M bezeichnet. Aus Symmetriegrün<strong>de</strong>n gilt ∂M =<br />
∂(M c ). Je<strong>de</strong>r Randpunkt von M ist also zugleich Limes von Punktfolgen in M und M c .<br />
Der Rand einer je<strong>de</strong>n Menge M ⊂ K n ist abgeschlossen.<br />
• offener Kern von Mengen: Für eine Menge M ⊂ K n ist <strong>de</strong>r offene Kern, o<strong>de</strong>r das Innere<br />
<strong>de</strong>finiert als:<br />
M ◦ := M\∂M.<br />
Es gilt: Die Menge M ◦ ist offen. Je<strong>de</strong> offene Teilmenge O ⊂ M ist in M ◦ enthalten.<br />
Das Innere M ◦ einer Menge M ⊂ K n ist die größte offene Menge, die in M liegt.<br />
• Anschluss einer Menge:<br />
Der Abschluss einer Menge M ⊂ K wird mit M bezeichnet und ist folgen<strong>de</strong>rmaßen <strong>de</strong>finiert:<br />
{<br />
}<br />
∣<br />
M := x ∈ K ∣∃(a n ) n∈N , a n ∈ M : x = lim a n<br />
n→∞<br />
Für Mengen M ⊂ K n ist <strong>de</strong>r Abschluss, bzw. die abgeschlossene Hülle <strong>de</strong>finiert als:<br />
M := M ∪ ∂M<br />
Es gilt: M ist abgeschlossen. Je<strong>de</strong> abgeschlossene Menge A, mit M ⊂ A enthält M.<br />
Der Abschluss M ist die kleineste abgeschlossene Menge, die M enthält.<br />
Beispiele: Der Rand von Q n in K n ist <strong>de</strong>r ganze K n . Der Rand von K n ist leer. Der Rand <strong>de</strong>r<br />
Kugelumgebung K r (0) ist: ∂K r (0) := {x ∈ K n |‖x − 0‖ 2<br />
= r}.<br />
• Eine Menge O ⊂ K n ist genau dann offen, wenn sie keinen ihrer Randpunkte enthält.<br />
• Eine Menge A ⊂ K n ist genau dann abgeschlossen, wenn sie alle ihre Randpunkte enthält.<br />
• kompakte Mengen: Eine Menge M ⊂ K heißt kompakt, wenn sie abgeschlossen und beschränkt<br />
ist. Auch die leere Menge ∅ heißt kompakt.<br />
Eine Menge M ⊂ K n heißt kompakt (bzw. folgenkompakt), wenn je<strong>de</strong> Folge in M einen<br />
Häufungspunkt in M besitzt.<br />
zusätzlich gilt: Der Durchschnitt A ∩ K einer abgeschlossenen Menge A und einer kompakten<br />
Menge K ist kompakt.<br />
Beispiele: Eine abgeschlossene Kugel K r (a) und <strong>de</strong>r Rand einer beschränkten Menge ∂M sind<br />
kompakt. Eine endliche Menge ist kompakt<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 11 –
1.6. Eigenschaften von Teilmengen <strong>de</strong>s K und <strong>de</strong>s K n<br />
• HEINE-BOREL’sche Über<strong>de</strong>ckungseigenschaft: Sei I eine In<strong>de</strong>xmenge, X ein metrischer<br />
Raum und K ⊂ X. Aus je<strong>de</strong>r Familie {U i } i∈I offener Mengen in X mit K ⊂ ⋃ i∈I<br />
U i können<br />
endlich viele U i1 , ..., U ir ausgewählt wer<strong>de</strong>n, so dass gilt:<br />
K ⊂ U i1 ∪ ... ∪ U ir .<br />
• Satz von HEINE-BOREL: Für eine Teilmenge M ⊂ K n sind folgen<strong>de</strong> Aussagen äquivalent:<br />
1. M ist folgen-kompakt.<br />
2. M ist beschränkt und abgeschlossen.<br />
3. Je<strong>de</strong> offene Über<strong>de</strong>ckung von M enthält eine endliche Über<strong>de</strong>ckung.<br />
Diese Charakterisierung von kompakt ist nur für endlich-dimensionale Vektorräume möglich.<br />
In unendlich dimensionalen VRs, wie <strong>de</strong>m C[a, b] sind zusätzliche Eigenschaften nötig, um die<br />
Kompaktheit von beschränkten und abgeschlossenen Mengen nachzuweisen.<br />
• BOLZANO-WEIERSTRASS-Charakterisierung: Eine Teilmenge M ⊂ K ist genau dann kompakt,<br />
wenn je<strong>de</strong> Folge in M eine Teilfolge besitzt, die gegen einen Punkt in M konvergiert.<br />
• Das Bild f(M) einer kompakten Menge M ⊂ K unter einer stetigen Funktion f : M → K ist<br />
ebenfalls kompakt.<br />
• Je<strong>de</strong> abgeschlossene Teilmenge einer kompakten Menge in K n ist ebenfalls kompakt.<br />
• vollständige Räume: Ein Vektorraum heißt vollständig, wenn alle Cauchyfolgen ihren Grenzwert<br />
in diesem Raum haben.<br />
• BANACH-Raum: Ein normierter (mit einer Norm versehener), vollständiger Vektorraum heißt<br />
BANACH-Raum.<br />
• relativ offene Mengen: Eine Teilmenge M ⊂ G ⊂ K n heißt relativ offen bzgl. G, wenn zu<br />
je<strong>de</strong>m Punkt a ∈ M eine Kugelumgebung K r (a) existiert, mit K r (a) ∩ G ⊂ M.<br />
• zusammenhängen<strong>de</strong> Mengen: Eine offene Menge G ⊂ K n heißt zusammenhängend, wenn es<br />
keine relativ-offene Zerlegung G = U ∪ V gibt, mit U, V ≠ ∅ und U ∩ V = ∅. Eine offene<br />
und weg-zusammenhängen<strong>de</strong> Menge G ⊂ K n heißt Gebiet.<br />
• Lebesgue-Nullmenge: Eine Teilmenge M ⊂ R heißt Lebesgue-Nullmenge, wenn es zu je<strong>de</strong>m<br />
ɛ > 0 höchstens abzählbar unendlich viele abgeschlossene (o<strong>de</strong>r offene) Intervalle I 1 , I 2 , ...<br />
gibt, so dass gilt:<br />
M ⊂ ⋃ ∑<br />
I k , |I k | ≤ ɛ.<br />
k<br />
k<br />
Eine Eigenschaft gilt fast überall, wenn sie überall bis auf eine Nullmenge gilt.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 12 –
Teil I<br />
<strong>Analysis</strong> 1: <strong>Analysis</strong> <strong>de</strong>s K<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 13 –
KAPITEL 2<br />
Folgen<br />
2.1 Definition & Konvergenzbegriffe<br />
• ɛ-Konvergenz:<br />
Eine Folge (a n ) n∈N konvergiert gegen einen Limes a ( lim<br />
n→∞ a n = a) genau dann, wenn:<br />
∀ɛ > 0 ∃N ɛ ∈ N :<br />
|a n − a| < ɛ für n > N ɛ<br />
• Cauchy-Folge (CF):<br />
Eine Folge (a n ) n∈N heißt Cauchy-Folge, wenn:<br />
∀ɛ > 0 ∃N ɛ ∈ N :<br />
|a n − a m | < ɛ für n, m > N ɛ<br />
• Sätze über Folgen:<br />
1. Je<strong>de</strong> konvergente Folge ist auch Cauchy-Folge.<br />
2. Je<strong>de</strong> Cauchy-Folge ist beschränkt.<br />
3. Je<strong>de</strong> Cauchy-Folge über R hat einen Limes in R (R ist vollständig)<br />
Proof. 1. Es gelte lim a n<br />
n→∞<br />
n, m > N:<br />
= a. Dann gibt es zu je<strong>de</strong>m ɛ > 0 ein N ∈ N, sodass für<br />
|a n − a| < 1 2 ɛ, |a m − a| < 1 2 ɛ<br />
Daraus ergibt sich mit <strong>de</strong>r Dreiecksungleichung:<br />
|a n − a m | = |a n − a + a − a m | ≤ |a n − a| + |a m − a| < 1 2 ɛ + 1 2 ɛ = ɛ<br />
2. aus einer unbeschränkten Folge (a n ) n∈N kann man eine divergente Teilfolge auswählen,<br />
aus <strong>de</strong>r man eine weitere Teilfolge (a nk ) erhält mit a nk+1 > 2 · a nk . Damit gilt dann:<br />
|a nk+1 − a nk | ≥ |a nk+1 | − |a nk | > |a nk+1 − a nk | → ∞<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 14 –
2.2. Beschränkung und Häufungspunkte<br />
• Es gilt: Folge konvergiert auf K ⇔ Folge ist Cauchy-Folge.<br />
• Der Limes einer konvergenten Folge ist ein<strong>de</strong>utig bestimmt.<br />
• Wer<strong>de</strong>n bei einer konvergenten Folge nur endlich viele Glie<strong>de</strong>r geän<strong>de</strong>rt, so bleibt sie konvergent.<br />
• Je<strong>de</strong> konvergente Folge ist notwendigerweise beschränkt.<br />
• Gilt für eine Folge a n ≥ 0 für fast alle n ∈ N, so folgt lim a n ≥ 0 (Für > gilt dies nicht<br />
unbedingt!).<br />
• Für zwei konvergieren<strong>de</strong> Folgen mit lim a n = a und lim b n = b existieren auch folgen<strong>de</strong><br />
n→∞ n→∞<br />
Grenzwerte:<br />
lim (a n + b n ) = a + b<br />
n→∞<br />
lim (a n · b n ) = a · b<br />
n→∞<br />
a n<br />
lim = a<br />
n→∞ b n b<br />
Für <strong>de</strong>n letzten Grenzwert ist noch b n ≠ 0 für fast alle b n und b ≠ 0 notwendig.<br />
• Für konvergente Folgen (a n ) n∈N auf K mit lim<br />
n→∞ a n = a gilt:<br />
lim |a n| = |a|<br />
n→∞<br />
lim Re a n = Re a<br />
n→∞<br />
lim Im a n = Im a<br />
n→∞<br />
• Beispiel:Konvergenz einiger Folgen:<br />
1<br />
= 0 n<br />
lim<br />
n→∞<br />
lim<br />
n→∞<br />
lim<br />
n→∞ qn = 0 0 ≤ q < 1 lim<br />
n√ n = 1<br />
lim<br />
n→∞<br />
n→∞<br />
lim<br />
n→∞<br />
2.2 Beschränkung und Häufungspunkte<br />
n<br />
= 0<br />
2 n<br />
• beschränkte Folgen:<br />
Eine Folge (a n ) n∈N (o<strong>de</strong>r Teilmenge) heißt beschränkt, falls:<br />
∀n ∈ N∃K ∈ R + : |a n | < K<br />
Entsprechend <strong>de</strong>finiert man Beschränktheit nach oben bzw. unten:<br />
a n ≤ K bzw. a n ≥ K ∀n ∈ N<br />
n√ c = lim<br />
n→∞ c1/n = 1<br />
n√<br />
n! = ∞<br />
• Eine beschränkte Folge (a n ) n∈N in R besitzt eine obere, sowie eine untere Grenze:<br />
sup a n := min {K ∈ R |a n ≤ K ∀n ∈ N}<br />
n∈N<br />
sup a n := max {K ∈ R |a n ≥ K ∀n ∈ N}<br />
n∈N<br />
Mit diesen gilt dann: sup a n ≤ a n ≤ sup a n .<br />
n∈N<br />
n∈N<br />
• Häufungspunkte (HP):<br />
Ein a heißt Häufungspunkt einer Folge (a n ) n∈N , falls es in je<strong>de</strong>r ɛ-Umgebung U ɛ (a) unendlich<br />
viele Folgenelemente a n gibt<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 15 –
2.3. Monotonie<br />
• Für Folgen (a n ) n∈N mit HP a gilt:<br />
– Zu je<strong>de</strong>m Häufungspunkt a gibt es eine konvergente Teilfolge (a nk ) mit lim<br />
k→∞ a n k<br />
= a.<br />
– Ein HP a än<strong>de</strong>rt sich nicht, wenn man endlich viele Elemente a n än<strong>de</strong>rt.<br />
– Eine konvergente Folge mit Limes b hat genau einen HP, <strong>de</strong>r mit b i<strong>de</strong>ntisch ist.<br />
• Satz von Bolzano Weierstraß:<br />
1. Je<strong>de</strong> beschränkte Folge o<strong>de</strong>r unendliche Teilmenge in K besitzt einen HP.<br />
2. Je<strong>de</strong> beschränkte Folge o<strong>de</strong>r unendliche Teilmenge in R besitzt einen größten und einen<br />
kleinsten HP, die mit lim sup a n , bzw. lim inf a n bezeichnet wer<strong>de</strong>n.<br />
n→∞<br />
n→∞<br />
• Def: abgeschlossen und kompakt<br />
– Eine Menge M ⊂ K heißt abgeschlossen, falls alle ihre Häufungspunkte ebenfalls in M<br />
liegen.<br />
– Eine abgeschlossene Teilmenge M ⊂ K heißt kompakt wenn je<strong>de</strong> (unendliche) Folge in<br />
ihr einen HP hat.<br />
Damit besagt <strong>de</strong>r Satz von Bolzano-Weierstraß, dass in K je<strong>de</strong> beschränkte, abgeschlossene<br />
Teilmenge kompakt ist<br />
• Je<strong>de</strong> beschränkte Folge (a n ) n∈N über K, die nicht konvergiert besitzt min<strong>de</strong>stens zwei Häufungspunkte.<br />
Nicht-beschränkte Folgen können auch eine divergente Teilfolge besitzen.<br />
2.3 Monotonie<br />
• Definition <strong>de</strong>r Monotonie:<br />
Eine Folge (a n ) n∈N heißt monoton steigen (fallend), falls gilt:<br />
a n+1 ≥ a n bzw. a n+1 ≤ a n (n ∈ N)<br />
• Je<strong>de</strong> beschränkte, monoton steigen<strong>de</strong> o<strong>de</strong>r fallen<strong>de</strong> Folge in R besitzt einen Grenzwert.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 16 –
KAPITEL 3<br />
Reihen<br />
3.1 Definitionen und Konvergenzbegriffe<br />
∑<br />
• Eine Reihe ∞ a k heißt konvergent mit Limes s ∞ , wenn die Folge iherer Partialsummen gegen<br />
k=1<br />
s ∞ konvergiert:<br />
lim<br />
n→∞<br />
n∑<br />
a k = s ∞<br />
∑<br />
• Eine Reihe ∞ ∑<br />
a k heißt absolut konvergent, wenn die Reihe ∞ |a k | konvergiert.<br />
k=1<br />
k=1<br />
• Die Untersuchung von Folgen kann in die Untersuchung von Reihen eingebettet wer<strong>de</strong>n, in<strong>de</strong>m<br />
man setzt:<br />
∑n−1<br />
a n = a 1 + (a 2 − a 1 ) + ... + (a n − a n−1 ) = a 1 + (a k+1 − a k )<br />
• Reihenkonvergenz: Eine Reihe ∑ ∞<br />
k=1 a k kann nur dann konvergieren, wenn ihre Partialsummen<br />
beschränkt sind und ihre Glie<strong>de</strong>r a k eine Nullfolge bil<strong>de</strong>n ( lim<br />
k→∞ a k = 0).<br />
• Für zwei konvergente Reihen ∑ ∞<br />
k=1 a k und ∑ ∞<br />
k=1 b k sind auch alle Linearkombinationen<br />
konvergent:<br />
∞∑<br />
∞∑<br />
∞∑<br />
αa k + βb k = α a k + β<br />
k=1<br />
k=1<br />
• Eine absolut konvergente Reihe ist auch konvergent, da<br />
∣ ∞∑ ∣∣∣∣ ∞∑<br />
a k ≤ |a k |<br />
∣<br />
• Beispiele:<br />
k=1<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 17 –<br />
k=1<br />
k=1<br />
k=1<br />
k=1<br />
b k
3.2. Konvergenzkriterien<br />
1. Die geometrische Reihe ∑ ∞<br />
k=1 xk mit festem x ∈ K und x ≠ 1 konvergiert für |x| ≤ 1<br />
gegen 1<br />
1−x<br />
2. Die harmonische Reihe ∑ ∞ 1<br />
k=1<br />
ist streng divergent.<br />
k<br />
3. ∑ ∞<br />
k=1 k = ∞.<br />
4. ∑ ∞<br />
k=1 (−1)k =<br />
{<br />
−1<br />
3.2 Konvergenzkriterien<br />
n ungera<strong>de</strong><br />
ist divergent.<br />
0 n gera<strong>de</strong><br />
• CAUCHY-Konvergenzkriterium: Sei (a n ) n∈N eine Folge reeller Zahlen. Die Reihe ∞ ∑<br />
konvergiert genau dann, wenn gilt:<br />
∀ ɛ > 0 : ∃N ∈ N :<br />
∣<br />
∣<br />
n∑ ∣∣∣∣<br />
a k < ɛ<br />
k=m<br />
∀ n ≥ m ≥ N<br />
Dieser Konvergenzbegriff folgt direkt aus <strong>de</strong>r CAUCHY-Konvergenz von Folgen.<br />
∑<br />
• Reihen mit nichtnegativen Glie<strong>de</strong>rn: Eine Reihe ∞ a k in R mit a k<br />
k=1<br />
a n<br />
n=0<br />
≥ 0 ist genau dann<br />
konvergent, wenn ihre Partialsummen beschränkt sind. (Beweisi<strong>de</strong>e: Folge <strong>de</strong>r Partialsummen<br />
ist monoton wachsend und n.V. beschränkt ⇒ Konvergenz)<br />
∑<br />
• Leibniz-Kriterium: Eine Reihe ∞ a k heißt alternierend, falls die Vorzeichen ihrer Glie<strong>de</strong>r<br />
k=1<br />
alternieren. Eine solche Reihe ist konvergent, wenn die Absolutbeträge ihrer Glie<strong>de</strong>r eine monoton<br />
fallen<strong>de</strong> Nullfolge bil<strong>de</strong>n (|a n | ≥ |a n+1 → 0 (n → ∞)).<br />
• Beispiele:<br />
∞∑<br />
k=1<br />
(−1) k−1<br />
k<br />
= 1 − 1 2 + 1 3 − 1 4 + ... = ln(2) ∞∑<br />
k=0<br />
(−1) k<br />
2k+1 = π 4<br />
∑<br />
• Dirichelet-Kriterium: Die Reihe ∞ a k habe beschräkte Partialsummen und die Folge (b k )<br />
∑<br />
sei eine monoton fallen<strong>de</strong> Nullfolge. Dann konvergiert ∞ a k b k .<br />
k=1<br />
k=1<br />
Mit <strong>de</strong>r Setzung a k = (−1) k ergibt sich das Leibniz-Kriterium.<br />
• Vergleichs-Kriterium: Sei<br />
∞∑<br />
c n eine konvergente Reihe mit c n ≥ 0 für fast alle n ∈ N.<br />
n=0<br />
∑<br />
1. Die Reihe ∞ a n konvergiert absolut, genau dann wenn mit einer Konstante κ > 0 gilt:<br />
n=0<br />
|a n | ≤ κc n für fast alle n ∈ N<br />
∑<br />
Da die Folge (c n ) n∈N die Folge (a n ) n∈N beschränkt, folgt hier aus <strong>de</strong>r Konvergenz von<br />
c n die Konvergenz von ∑ a n . Die Divergenz von ∑ a n impliziert die Divergenz von<br />
∑n<br />
n<br />
n<br />
c n .<br />
n<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 18 –
3.2. Konvergenzkriterien<br />
∑<br />
2. Die Reihe ∞ a n konvergiert absolut, genau dann wenn:<br />
n=0<br />
∣ a k+1 ∣∣∣<br />
∣ ≤ c k+1<br />
a k c k<br />
für fast alle n ∈ N<br />
Aus <strong>de</strong>r Divergenz von ∑ n<br />
a n folgt ebenfalls die Divergenz von ∑ n<br />
c n .<br />
• Quotientenkriterium: Sei<br />
∞∑<br />
a n eine Reihe mit a n ≠ 0 für alle n ≥ N 0 . Es gebe eine reelle<br />
n=0<br />
Zahl θ mit 0 < q < 1, so dass<br />
∣ a n+1 ∣∣∣<br />
∣ ≤ q < 1 für alle n > N 0<br />
a n<br />
Dann konvergiert die Reihe ∑ n a n absolut.<br />
Beispiel: Die Konvergenz <strong>de</strong>r Reihe ∞ ∑<br />
n=0<br />
n 2<br />
2 n folgt aus <strong>de</strong>m Quotientenkriterium.<br />
∑<br />
• Wurzelkriterium: Eine Reihe ∞ a k konvergiert absolut, wenn es ein 0 < q < 1 und ein<br />
k=1<br />
N 0 ∈ N gibt, so dass für alle n ≥ N 0 gilt:<br />
√<br />
n<br />
|an | ≤ q < 1.<br />
Sie divergiert absolut, wenn für alle n ≥ N 0 gilt:<br />
√<br />
n<br />
|an | > 1<br />
• Beispiel: Wurzelkriterium ist stärker als das Quotientenkriterium:<br />
Man betrachte die folgen<strong>de</strong> Reihe (a n ) n∈N :<br />
{<br />
2 −1 n gera<strong>de</strong><br />
a n :=<br />
3 −n n ungera<strong>de</strong><br />
Für das Wurzelkriterium und Quotientenkriterium erhält man je zwei Fälle, nur das Wurzelkriterium<br />
impliziert mit diesen Fällen auch die Konvergenz:<br />
– Quotientenkriterium:<br />
⎧<br />
∣ ∣ a n+1 ∣∣∣ ⎨<br />
∣∣ 2−(n+1)<br />
3 =<br />
1<br />
∣ =<br />
· ∣∣ ∣<br />
3 n<br />
−n 2 2 =<br />
1 · ∣∣ ∣<br />
3 n<br />
n 2 2 =<br />
1 · ∣∣ 3∣ n → ∞ (n → ∞).<br />
∣ n 2 2<br />
a n ⎩<br />
∣∣<br />
∣ 3−(n+1)<br />
2 =<br />
1 · ∣∣ ∣<br />
2 n<br />
= 1 · ∣∣ ∣<br />
2 n<br />
= 1 · ∣∣ 2∣ n → 0 (n → ∞).<br />
−n 3 3 n 3 3 n 3 3<br />
– Wurzelkriterium:<br />
√<br />
n<br />
|an | =<br />
{<br />
n√<br />
2<br />
−n<br />
= 1 2 < 1<br />
n√<br />
3<br />
−n<br />
= 1 3 < 1 2 < 1<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 19 –
3.3. Exponentialreihe<br />
• Potenzreihe: Eine Potenzreihe<br />
∞∑<br />
c n (x − x 0 ) n<br />
n=0<br />
konvergiert absolut für alle Argumente x ∈ K mit <strong>de</strong>r Eigenschaft<br />
|x − x 0 | < R :=<br />
1<br />
√<br />
n<br />
lim sup |cn | ;<br />
n→∞<br />
Für |x − x 0 | > R ist sie divergent. Die Grenze R heißt Konvergenzradius <strong>de</strong>r Reihe.<br />
∑<br />
• Umordnungssatz: Für eine absolut konvergente Reihe s ∞ = ∞ a k konvergiert auch je<strong>de</strong><br />
Umordnung absolut gegen <strong>de</strong>n selben Limes.<br />
Als Beispiel dafür, dass <strong>de</strong>r Umordnungssatz nur bei absoluter Konvergenz gilt, betrachte man<br />
die alternieren<strong>de</strong> harmonische Reihe:<br />
s ∞ =<br />
∞∑ (−1) k−1<br />
.<br />
k<br />
k=1<br />
Ihr Limes än<strong>de</strong>rt sich, wenn man jeweils drei aufeinan<strong>de</strong>rfolgen<strong>de</strong> Glie<strong>de</strong>r zusammenfasst.<br />
k=1<br />
3.3 Exponentialreihe<br />
Die sog. Exponentialreihe<br />
exp(x) :=<br />
∞∑<br />
k=0<br />
ist eine Potenzreihe. Ihr Konvergenzradius ergibt sich zu:<br />
x k<br />
k!<br />
R =<br />
1<br />
√<br />
n<br />
√ = lim<br />
n<br />
|n!| = ∞.<br />
lim sup |1/n!| n→∞<br />
n→∞<br />
EULER’sche Zahl e: Es gilt:<br />
exp(1) =<br />
∞∑<br />
k=0<br />
(<br />
1<br />
k! = lim 1 + 1 n<br />
= e.<br />
n→∞ n)<br />
Eigenschaften: Die Exponentialreihe hat folgen<strong>de</strong> Eigenschaten:<br />
1. exp(x + y) = exp(x) · exp(y)<br />
2. exp(x) > 0 ∀x ∈ R<br />
3. exp(−x) = 1<br />
exp(x)<br />
∀x ∈ R<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 20 –
3.4. Doppelreihen, Produktsätze<br />
3.4 Doppelreihen, Produktsätze<br />
• CAUCHY’scher Doppelreihensatz: Ist die Doppelreihe<br />
s ∞ =<br />
∞∑<br />
j,k=1<br />
bzgl einer Reihenfolge <strong>de</strong>r Summation absolut konvergent, so ist je<strong>de</strong> ihrer Zeilen- und Spaltenreihen<br />
∞∑<br />
∞∑<br />
s (j)<br />
∞ = a jk , s (k)<br />
∞ = a jk<br />
k=1<br />
absolut konvergent und die Reihenfolge <strong>de</strong>r Summation ist für <strong>de</strong>n Limes irrelevant.<br />
• CAUCHY-Produkt: Für zwei absolut konvergente Reihen ∑ a K und ∑ b k ist die Produktreihe<br />
mit <strong>de</strong>n folgen<strong>de</strong>n Elementen ebenfalls absolut konvergent und es gilt:<br />
(<br />
∞∑<br />
∞<br />
) (<br />
∑<br />
∞<br />
)<br />
∑<br />
c n := a 1 b n−1 · ...ȧ n−1 b 1 ; c k = a k · b k<br />
k=1<br />
a jk<br />
j=1<br />
k=1<br />
k=1<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 21 –
KAPITEL 4<br />
Funktionen<br />
4.1 Grundlegen<strong>de</strong> Eigenschaften<br />
• Periodizität: Eine Funktion f : R → K heißt periodisch mit Perio<strong>de</strong> L, wenn gilt:<br />
f(x + n · L) = f(x), ∀x ∈ R, n ∈ Z.<br />
• Gera<strong>de</strong>/Ungera<strong>de</strong> Funktionen: Eine Funktion heißt gera<strong>de</strong>, wenn f(−x) = f(x). Sie heißt<br />
ungera<strong>de</strong>, wenn f(−x) = −f(x).<br />
• Monotonie: Eine reelle Funktion f : I → R heißt monoton steigend bzw. monoton fallend,<br />
wenn für Punkte x 1 , x 2 ∈ I gilt:<br />
x 1 ≤ x 2 ⇒ f(x 1 ) ≤ f(x 2 ) bzw. x 1 ≤ x 2 ⇒ f(x 1 ) ≥ f(x 2 ).<br />
• Satz über monotone Funktionen und ihre Umkehrfunktionen: Für eine strikt monoton steigen<strong>de</strong><br />
(fallen<strong>de</strong>) Funktion f : I → R existiert auf <strong>de</strong>m Bild B = {y ∈ R |y = f(x), x ∈ I} die<br />
Umkehrfunktion f −1 : B → I und ist ebenfalls strikt monoton steigend (fallend).<br />
• Limes einer Funktion: Eine Funktion f : D → K hat einen (regulären) Limes a ∈ K in einem<br />
Punkt x 0 ∈ D, wenn für alle Folgen (x n ) n∈N mit x n ∈ D ∀n ∈ N, gilt:<br />
x n → x 0 (n → ∞) ⇒ f(x n ) → a (n → ∞)<br />
• Supremum und Infimum einer Funktion: Für eien Funktion f : D → R sind Supremum und<br />
Infimum <strong>de</strong>finiert als kleinste obere, bzw. größte untere Grenze ihrer Bildmenge:<br />
sup f(x) := min { β ∈ R ∣ }<br />
f(x) ≤ β ∀x ∈ D<br />
x∈D<br />
inf x∈D := max{ α ∈ R ∣ }<br />
f(x) ≥ α ∀x ∈ D<br />
Auf einem beschränkten D garantiert die Trennungseigenschaft von R die Existenz von sup<br />
bzw. inf.<br />
Existieren Punkte x max , x min ∈ D mit:<br />
sup f(x)<br />
x∈D<br />
= f(x max ) =: max x∈D<br />
inf x∈D = f(x min) =: min x∈D<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 22 –
4.2. Stetigkeit<br />
so spricht man von einem Maximum <strong>de</strong>r Minimum von f.<br />
• Konvexität: Eine Funktion ist Konvex auf (a, b), wenn die Sekante durch ( a, f(a) ) und ( b, f(b) )<br />
oberhalb <strong>de</strong>s Funktionsgraphen liegt. Diese Gera<strong>de</strong> hat die Funktionsgleichung:<br />
L(x, a, b) := b − x<br />
b − a f(a) + x − a<br />
b − a f(b)<br />
Damit lässt sich die Konvexitätsbedingung auch formulieren als<br />
f(x) ≤ L(x, r l , r r ) ∀r l , x, r r ∈ (a, b) mit r l < x < r r<br />
Da die Punkte x ∈ (a, b) genau die Punkte b + λ · (a − b) = λa + (1 − λ)b ∀λ ∈ (0, 1)<br />
sind, gilt bei Konvexität:<br />
f(λx + (1 − λ)y) ≤ λf(x) + (1 − λ)f(y)<br />
4.2 Stetigkeit<br />
• Stetigkeit einer Funktion: Eine Funktion f : D → K heißt stetig in einem Punkt x 0 ∈ D,<br />
wenn für je<strong>de</strong> Folge (x n ) n∈N ⊂ D gilt:<br />
x n → x 0 (n → ∞) ⇒ f(x n ) → f(x 0 ) (n → ∞)<br />
Sie heißt stetig auf einer Menge M ⊆ D, wenn sie stetig in je<strong>de</strong>m Punkt x 0 ∈ D ist.<br />
• Stetigkeit per ɛ/δ-Argument: Eine Funktion f : D → K heißt stetig in einem Punkt x 0 ∈ D,<br />
wenn es zu je<strong>de</strong>m ɛ > 0 ein δ ɛ > 0 gibt, so dass für alle x ∈ D gilt:<br />
In Quantorenschreibweise:<br />
|x − x 0 | ≤ δ ɛ ⇒ |f(x) − f(x 0 )| < ɛ.<br />
∀ɛ > 0 : ∃δ ɛ > 0 : ∀x ∈ D :<br />
(<br />
|x − x0 | ≤ δ ɛ ⇒ |f(x) − f(x 0 )| < ɛ ) .<br />
• Eine Funktion f : D → K sei in einem Punkt x 0 ∈ D stetig und es gelt f(x 0 ) ≠ 0. Dann gibt es<br />
eine ɛ-Umgebung U ɛ (x 0 ) <strong>de</strong>rart, dass f(x) ≠ 0 für alle x ∈ U ɛ (x 0 ).<br />
• Eigenschaften stetiger Funktionen:<br />
1. Für eine stetige Funktion f : D → K ist auch je<strong>de</strong> Restriktion f ′ : D ′ → K auf ein<br />
D ′ ⊂ D stetig.<br />
2. Für eine in x 0 ∈ D stetige Funktion f : D → K sind auch Re f, Im f, |f|, n√ f stetig.<br />
3. Für in x 0 ∈ D stetige Funktionen f, g : D → K sind auch f · g und f + g stetig. Ist weiter<br />
g(x 0 ) ≠ 0, so ist auch f/g stetig.<br />
4. Für eine in x 0 ∈ D stetige Funktion f : D → B ⊂ K und eine in f(x 0 ) ∈ B stetige<br />
Funktion g : B → K ist auch ihre Komposition g ◦ f : D → K stetig in x 0 .<br />
Dieses Lemma zeigt, dass die auf einem beschränkten Intervall stetigen Funktionen einen Vektorraum<br />
bil<strong>de</strong>n. Dieser wird mit C[a, b] bezeichnet. Siehe hierzu <strong>de</strong>n Abschnitt 4.4.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 23 –
4.2. Stetigkeit<br />
• Satz über die Umkehrfunktion stetiger Funktionen: Sei D ⊂ K beschränkt und abgeschlossen,<br />
also kompakt. Weiter sei eine Funktion f : D → B ⊂ K injektiv und stetig. Dann ist auch<br />
ihre Umkehrfunktion f −1 : B → D stetig.<br />
• Zwischenwertsatz: Sei f : [a, b] → R eine reelle stetige Funktion. Dann gibt es zu je<strong>de</strong>r<br />
reellen Zahl f(a) ≤ y ≤ f(b) ein c ∈ [a, b] mit f(c) = y.<br />
• Satz von <strong>de</strong>r Beschränktheit: Eine auf einer beschränkten, abgeschlossenen (also kopakten)<br />
Teilmenge D ⊂ K stetige Funktion f : D → K ist dort beschränkt, d.h.:<br />
∣<br />
∃K > 0 : ∣ f(x) ≤ K<br />
sup<br />
x∈D<br />
• Satz vom Exremum: EIne auf einer kompakten Teilmenge D ⊂ K stetige reell-wertige Funktion<br />
f : D → R besitzt dort ein Maximum und ein Minimum, d.h.:<br />
∃x min , x max ∈ D :<br />
sup f(x) = max f(x) = f(x max),<br />
x∈D<br />
x∈D<br />
inf f(x) = min f(x) = f(x min)<br />
x∈D x∈D<br />
• gleichmäßige Stetigkeit: Eine auf einer kompakten Teilmenge D ⊂ K stetige Funktion ist dort<br />
gleichmäßig stetig, d.h.:<br />
∀ɛ > 0 ∃δ ɛ > 0 : ∀x, x ′ ∈ D : |x − x ′ | < δ ɛ ⇒ ∣ ∣ f(x) − f(x ′ ) ∣ ∣ < ɛ.<br />
• LIPSCHITZ-Stetigkeit: Eine Funktion f : D → C heißt Lipschitz-stetig auf D mit Lipschitz-<br />
Konstante L, wenn:<br />
∃L > 0 : ∀x, y ∈ D : |f(x) − f(y)| ≤ L · |x − y|.<br />
Gilt weiter L < 1, so nennt man f ein Kontraktion.<br />
Geometrisch be<strong>de</strong>utet Lipschitz-stetig, dass die Abstandsverzerrung durch die Abbildung f, die<br />
charakterisiert wird, durch ein festes K auf ganz D beschränkt ist.<br />
durch |f(x)−f(y)|<br />
|x−y|<br />
Lemma: Lipschitz-stetige Funktionen auf D sind auch stetig auf D.<br />
• Beispiel: eine gleichmäßig stetige Funktion, die nicht Lipschitz-stetig ist:<br />
Man betrachte die Funktion:<br />
f(x) := √ x, mit: x ∈ [0, 1].<br />
Diese Funktion ist auf (0, 1] stetig und damit auch auf [0, 1] mit <strong>de</strong>r Fortsetzung f(0) = 0<br />
gleichmäßig stetig. Aber sie ist nicht Lipschitz-stetig, mit folgen<strong>de</strong>n Argumenten:<br />
∣ √ 0 − √ x∣<br />
∣ √ x ∣ ∣<br />
⇒ L<br />
!<br />
≤ L · |0 − x|<br />
!<br />
≤<br />
≥<br />
L · |x|<br />
√ ∣ ∣ x<br />
∣∣∣ ∣ x ∣ = 1 ∣∣∣<br />
√x → ∞ (x → 0)<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 24 –
4.3. Konvergenz von Funktionenfolgen<br />
4.3 Konvergenz von Funktionenfolgen<br />
• Punktweise Konvergenz: Seien f n : D → R, n ∈ N eine Folge von Funktionen auf einem<br />
gemeinsamen Definitionsbereich D ⊂ R. Man nennt die Folge (f n ) punktweise konvergent<br />
gegen eine Funktion f : D → R, wenn für je<strong>de</strong>s x ∈ D gilt:<br />
f n (x) → f(x) (n → ∞)<br />
• Gleichmäßige Konvergenz: Eine Folge von Funktionen f n : D → R, n ∈ N heißt gleichmäßig<br />
konvergent gegen eine Funktion f : D → R, wenn:<br />
∀ɛ > 0 : ∃N ɛ ∈ N : |f n (x) − f(x)| < ɛ ∀x ∈ D ∀n > N ɛ<br />
• Satz über gleichmäßig konvergente Funktionenfolgen: Konvergiert eine Funktionenfolge<br />
f n : D → R, n ∈ N gleichmäßig gegen eine Funktion f : D → R, so ist auch die Grenzfunktion<br />
f stetig.<br />
4.4 Der Funktionenraum C[a, b]<br />
Nach einem oben erwähnten Lemma bil<strong>de</strong>n die stetigen Funktionen f : D → R auf einem kompakten<br />
Intervall D = [a, b] einen Vektorraum. Dieser wird mit<br />
C[a, b] := { f : [a, b] → R ∣ ∣ f stetig<br />
}<br />
bezeichnet und hat folgen<strong>de</strong> Eigenschaften:<br />
• Maximumsnorm: Auf C[a, b] wird durch<br />
‖f‖ ∞<br />
:= max |f(x)|<br />
x∈[a,b]<br />
eine Norm <strong>de</strong>finiert, die sog. Maximumsnorm. Das Maximum existiert auf Grund <strong>de</strong>r Abgeschlossenheit<br />
von [a, b] und <strong>de</strong>r Stetigkeit von f.<br />
• Gleichmäßig beschränkt: Man nennt eine Funktionenfolge (f n ) n∈N ⊂ C[a, b] gleichmäßig<br />
beschränkt, wenn:<br />
(<br />
sup ‖f n ‖ ∞<br />
= sup max |f n (x)| ) < ∞.<br />
n∈N<br />
n∈N x∈[a,b]<br />
• Gleichmäßige Konvergenz: Für eine Funktionenfolge f n : D → R, n ∈ N auf einem kompakten<br />
Intervall D = [a, b] ist die gleichmäßige Konvergenz gegen eien Grenzfunktion f : [a, b] →<br />
R gleichbe<strong>de</strong>utend mit:<br />
‖f n − f‖ ∞<br />
→ ∞ (n → ∞)<br />
• CAUCHY-Folge: Eine Folge (f n ) n∈N ⊂ C[a, b] heißt CAUCHY-Folge, wenn:<br />
∀ɛ > 0 ∃N ɛ ∈ N :<br />
‖f n − f m ‖ ∞<br />
< ɛ ∀n, m ≥ N ɛ<br />
Je<strong>de</strong> konvergente Funktionenfolge aus C[a, b] ist auch CAUCHY-Folge.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 25 –
4.4. Der Funktionenraum C[a, b]<br />
• Vollständigkeit: Der Raum C[a, b] ist vollständig bezüglich <strong>de</strong>r gleichmäßigen Konvergenz,<br />
d.h. Je<strong>de</strong> Cauchy-Folge von Funktionen aus C[a, b] besitzt einen Limes in C[a, b].<br />
Damit bil<strong>de</strong>t das Paar (C[a, b], ‖·‖ ∞<br />
), <strong>de</strong>s C[a, b]zusammen mit <strong>de</strong>r Maximumsnorm einen<br />
Banach-Raum.<br />
• Satz von ARZELÀ-ASCOLI: Sei (f n ) n∈N ⊂ C[a, b] eine Folge von Funktionen in C[a, b],<br />
welche gleichmäßig beschränkt und gleichgradig stetig sind:<br />
∀ɛ > 0 ∃δ ɛ > 0 : ∀n ∈ N :<br />
sup ‖f n ‖ ∞<br />
< ∞<br />
n∈N<br />
max |f n (x) − f n (x ′ )|<br />
x,x ′ ∈I; |x−x ′ |≤δ ɛ<br />
< ɛ<br />
Dann existiert eine Teilfolge (f nk ), welche gegen ein f ∈ C[a, b] konvergiert:<br />
‖f nk − f‖ ∞<br />
→ 0 (k → ∞)<br />
Gleichmäßig beschränkt be<strong>de</strong>utet, dass man eine Beschränkungskonstante für alle Folgenglie<strong>de</strong>r<br />
fin<strong>de</strong>t. Bei <strong>de</strong>r gleichgradigen Stetigkeit hat man die selbe Abschätzung auf <strong>de</strong>m gesamten<br />
Intervall unf für alle Elemente <strong>de</strong>r Folge. Praktisch kann man die L-Stetigkeit mit einer Konstante<br />
L, die für die gesamte Folge gilt nachweisen.<br />
Dieser Satz entspricht in etwa <strong>de</strong>m Satz von Bolzano-Weierstraß, da er die Existenz einer konvergenten<br />
Teilfolge auf <strong>de</strong>m Raum C[a, b]und damit von Häufungspunkten sichert. Der Satz<br />
von Bolzano-Weierstraß leistet dies für <strong>de</strong>n Zahlenraum R. Wichtig ist, dass für <strong>de</strong>n unendlichdimensionalen<br />
Funktionenraum zusätzliche Eigenschaften nötig sind, um die Existenz von<br />
Häufungspunkten zu zeigen. Hier wird zusätzlich zur Beschränkheit noch die gleichgradige<br />
Stetigkeit gefor<strong>de</strong>rt.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 26 –
KAPITEL 5<br />
Differentiation<br />
5.1 Grundbegriffe<br />
• Differenzierbarkeit: Eine Funktion f : D → R heißt differenzierbar im Punkt x 0 ∈ D mit <strong>de</strong>r<br />
Ableitung f ′ (x 0 ), wenn für je<strong>de</strong> Nullfolge (h n ) n∈N mit x 0 + h n ∈ D die Folge <strong>de</strong>r zugehörigen<br />
Differenzenquotienten (D hn f(x 0 )) konvergiert:<br />
D h f(x 0 ) := f(x 0 + h) − f(x 0 )<br />
h<br />
Ist eine Funktion f : D → R in einem Punkt x 0 ∈ D differenzierbar, so haben die Folgen von<br />
Differenzenquotienten alle <strong>de</strong>n selben Limes, d.h.:<br />
f ′ (x 0 ) :=<br />
lim<br />
x 0 +h∈D, h→0<br />
f(x 0 + h) − f(x 0 )<br />
.<br />
h<br />
Eine Funktion f : D → R heißt differenzierbar auf D, wenn sie in je<strong>de</strong>m Punkt x 0<br />
differenzierbar (bzw. im Falle eines Randpunktes einseitig differenzierbar) ist.<br />
Sie heißt stetig differenzierbar, wenn die Ableitung f ′ auf D stetig ist.<br />
∈ D<br />
• Eine Funktion f : D → R ist genau dann in einem Punkt x 0 ∈ D differenzierbar mit Ableitung<br />
f ′ (x 0 ), wenn:<br />
∀ɛ > 0 ∃δ ɛ > 0 : x 0 + h ∈ D, |h| < δ ɛ ⇒<br />
f(x 0 + h) − f(x 0 )<br />
∣<br />
− f ′ (x 0 )<br />
h<br />
∣ < ɛ<br />
• Eine Funktion f : D → R ist genau dann in einem Punkt x 0 ∈ D differenzierbar mit Ableitung<br />
f ′ (x 0 ), wenn:<br />
∃c ∈ R : f(x) = f(x 0 ) + c · (x − x 0 ) + ω(x), x ∈ D,<br />
mit einer Funktion ω : D → R, für die gilt:<br />
lim<br />
x∈D, x→x 0<br />
ω(x)<br />
x − x 0<br />
= 0.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 27 –
5.2. Mittelwertsätze und Extremalbedingungen<br />
In diesem Falle ist c = f ′ (x 0 ).<br />
Dieser Satz besagt, dass die differenzierbare Funktion f im Punkt x 0 durch eine Gera<strong>de</strong> g(x) =<br />
f(x 0 ) + f ′ (x 0 ) · (x − x 0 ) aproximiert wird. Der Graph von g ist eine Tangente an <strong>de</strong>n Graphen<br />
im Punkt x 0 .<br />
• Eine Funktion f : d → R, die in einem Punkt x 0 ∈ D differenzierbar ist, ist dort notwendig<br />
auch stetig.<br />
• Ableitungsregeln: Für Ableitungen gelten folgen<strong>de</strong> Regeln:<br />
1. Linearkombinationen: (αf + βg) ′ (x) = αf ′ (x) + βg ′ (x)<br />
2. Produktregel: d f(g(x)) = dx f′ (x)g(x) + f(x)g ′ (x)<br />
( )<br />
3. Quotientenregel: d f(x)<br />
= f ′ (x)g(x)−f(x)g ′ (x)<br />
dx g(x)<br />
g 2 (x)<br />
4. invertierbare Funktionen: Für eine invertierbare Funktion f : D → B ⊂ R mit abgeschlossenem<br />
Definitionsbereich ist auch die Umkehrfunktion f −1 : B → D ⊂ R differenzierbar<br />
und es gilt:<br />
(f −1 ) ′ (y) = 1<br />
f ′ (x) , y = f(x)<br />
Für <strong>de</strong>n Beweis wer<strong>de</strong>n die Folgen y n = f(x n ), y 0 = f(x 0 ) mit y n → y 0 (n → ∞)<br />
betrachtet, für die wegen <strong>de</strong>r Stetigkeit von f −1 auch x → x 0 gilt. Wäre nun D nicht<br />
abgeschlossen, so könnte man x 0 ∈ D nicht garantieren.<br />
5. Kettenregel: Seien g : D g → R und f : D f → D g ⊂ R stetig diff’bare Funktionen. Die<br />
FUnktion f sei im Punkt x 0 ∈ D f differenzierbar und g sei in y 0 = f(x 0 ) differenzierbar.<br />
Dann ist die zusammengesetzte Funktion g(f(x)) = (f ◦ g)(x) in x 0 differenzierbar und<br />
es gilt:<br />
d<br />
dx g(f(x 0)) = g ′ (f(x 0 ))f ′ (x 0 )<br />
5.2 Mittelwertsätze und Extremalbedingungen<br />
• Satz vom Extremum: Besitzt eine auf einem Intervall I = (a, b) differenzierbare Funktion f<br />
ein lokales Extremum (Maximum o<strong>de</strong>r Minimum) x 0 ∈ I, d.h. für ein festes δ > 0 gilt:<br />
so ist notwendig f ′ (x 0 ) = 0.<br />
f(x 0 ) ≥ f(x) o<strong>de</strong>r f(x 0 ) ≤ f(x) ∀x ∈ U δ (x 0 ),<br />
Auf einem Abgeschlossenen Intervall besitzt je<strong>de</strong> stetige Funktion ein Maximum und ein Minimum.<br />
Da diese auch auf <strong>de</strong>n Randpunkten liegen können, muss dort nicht unbedingt f ′ (x 0 ) = 0<br />
gelten.<br />
• Satz von ROLLE: Wenn eine im Intervall [a, b] stetige Funktion in (a, b) differenzierbar ist<br />
und f(a) = f(b) gilt, so gibt es ein ξ ∈ (a, b), in <strong>de</strong>m f ′ (ξ) = 0 ist.<br />
Insbeson<strong>de</strong>re liegt zwischen zwei Nullstellen einer Funktion stets auch eine Nullstelle ihrer<br />
Ableitung.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 28 –
5.3. TAYLOR-Entwicklungen<br />
• 1. Mittelwertsatz: Ist eine Funktion f im Intervall [a, b] stetig und in (a, b) diff’bar, so gibt es<br />
ein ξ ∈ (a, b), so dass:<br />
f ′ f(b) − f(a)<br />
(ξ) = .<br />
b − a<br />
Der Satz besagt also, dass unter <strong>de</strong>n obigen Bedingungen die Ableitung einer Funktion auf<br />
einem Intervall, irgendwo <strong>de</strong>ren Mittelwert annimmt.<br />
Folgerungen aus <strong>de</strong>m Mittelwertsatz:<br />
1. Monotoniebedingung: Sei f : (a, b) → R differenzierbar. Dann gilt mit x ∈ (a, b):<br />
– f ′ (x) ≥ 0 ⇒ f ist monoton steigend.<br />
– f ′ (x) ≤ 0 ⇒ f ist monoton fallend.<br />
2. Minimum/Maximum: Sei f : (a, b) → R zweimal differenzierbar mit f ′ (x 0 ) = 0, x 0 ∈<br />
(a, b). Dann gilt:<br />
– f ′′ (x) > 0 ⇒ f hat in x 0 ein striktes lokales Minimum.<br />
– f ′′ (x) < 0 ⇒ f hat in x 0 ein striktes lokales Maximum.<br />
3. Konvexitätsbedingung: Gilt für eine auf einem offenen, beschränkten o<strong>de</strong>r unbeschränkten<br />
Intervall I <strong>de</strong>finierte und zweimal diff’bare Funktion f : I → R, dass f ′′ (x) ≥ 0, x ∈ I,<br />
so ist f konvex, d.h.: Für beliebige x, y ∈ I und λ ∈ (0, 1) gilt:<br />
f(λx + (1 − λ)y) ≤ λf(x) + (1 − λ)f(y).<br />
4. LIPSCHITZ-Stetigkeit: Ist die Ableitung einer in [a, b] stetigen und in (a, b) diff’baren<br />
Funktion f beschränkt, |f ′ (x)| ≤ K, x ∈ (a, b), so ist f dort Lipschitz-stetig:<br />
|f(x) − f(x ′ )| ≤ K · |x − x ′ |;<br />
x, x ′ ∈ [a, b].<br />
• 2. Mittelwertsatz: Sind die Funktionwn f und g im Intervall [a, b] stetig und in (a, b) diff’bar<br />
und ist g ′ (x) ≠ 0 für x ∈ (a, b), so gibt es ein ξ ∈ (a, b), so dass gilt:<br />
f ′ (ξ)<br />
g ′ (ξ)<br />
=<br />
f(b) − f(a)<br />
g(b) − g(a)<br />
Für zwei Funktionen gibt es also einen Punkt ξ, an <strong>de</strong>m das Verhältnis <strong>de</strong>r Ableitungen, gleich<br />
<strong>de</strong>m Verhältnis <strong>de</strong>r Steigungen <strong>de</strong>r zwei Gera<strong>de</strong>n durch Anfangs- und Endpunkt <strong>de</strong>r Funktionen<br />
im Intervall [a, b] ist.<br />
5.3 TAYLOR-Entwicklungen<br />
• TAYLOR-Polynom: Für eine auf <strong>de</strong>m offenen Intervall (a, b) <strong>de</strong>finierte und n-mal stetig diff’bare<br />
Funktion f hat für ein x 0 ∈ (a, b) das n-te Taylor-Polynom von f in x 0 die Form:<br />
t n (x 0 , x) :=<br />
n∑<br />
k=0<br />
f (k) (x 0 )<br />
(x − x 0 ) k .<br />
k!<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 29 –
5.3. TAYLOR-Entwicklungen<br />
• Sei f eine auf einem offenen Intervall (a, b) <strong>de</strong>finierte und (n+1)-mal stetig diff’bare Funktion<br />
und t n (x 0 , ·) ihr n-tes Taylor-Polynom um ein x 0 ∈ (a, b). Dann gibt es zu je<strong>de</strong>m x ∈ (a, b)<br />
ein ξ zwischen x und x 0 , so dass gilt:<br />
f(x) = t n (x 0 , x) + f(n+1) (ξ)<br />
(n + 1)! (x − x 0) n+1<br />
} {{ }<br />
Restglied<br />
• Glattheit, bzw. C ∞ -Funktionen: Eine Funktion f auf einem Intervall (a, b) heißt glatt o<strong>de</strong>r<br />
C ∞ -Funktion, wenn sie beliebig oft diff’bar ist. Ihre Taylor-Reihe um ein x 0 ∈ (a, b) ist dann<br />
<strong>de</strong>finiert durch:<br />
∞∑ f (k) (x 0 )<br />
t ∞ (x 0 , x) :=<br />
(x − x 0 ) k .<br />
k!<br />
k=0<br />
• (Reell) analytische Funktionen: Konvergiert die Taylor-Reihe einer C ∞ -Funktion f für alle<br />
x ∈ (a, b) und gilt dort auch f(x) = t ∞ (x 0 , x), so heißt f reell analytisch.<br />
• TAYLOR-Entwicklung: Sei f auf einem Intervall (a, b) eine C ∞ -Funktion mit (gleichgradig)<br />
gleichmäßig beschränkten Ableitungen:<br />
∣ f (n) (x) ∣ ≤ M ≤ ∞, n ∈ N<br />
sup<br />
x∈(a,b)<br />
Dann ist f auf (a, b) analytisch, d.h.: Für alle x, x 0 ∈ (a, b) konvergiert die Taylor-Reihe von f<br />
und es gilt:<br />
∞∑ f (k) (x 0 )<br />
f(x) = t ∞ (x 0 , x) =<br />
(x − x 0 ) k .<br />
k!<br />
k=0<br />
Eine C ∞ -Funktion muß nicht analytisch sein. Ein Gegenbeispiel ist die auf R <strong>de</strong>finierte Funktion<br />
{<br />
exp(−x −2 ), x ≠ 0<br />
f(x) =<br />
0, x = 0<br />
Diese Funktion ist wegen lim exp(−x −2 ) = 0 in x 0 = 0 und damit auf ganz R stetig. Alle<br />
x→0<br />
Ableitung f (n) (x) existieren und lassen sich in x 0 = 0 durch f(0) := 0 stetig fortsetzen. Damit<br />
ist f ∈ C ∞ . Die Taylorreihe von f ist in x 0 = 0 die Nullfunktion und konvergiert dort also auch<br />
gegen f. Allerdings stellt die Taylorreihe f in R\ {0} nirgends dar. Damit ist sie nicht analytisch.<br />
• Restgliedarstellung: Das Restglied R n+1 (x 0 , x) bei <strong>de</strong>r Taylor-Entwicklung ist in <strong>de</strong>r Differentialbzw.<br />
Integraldarstellung:<br />
• Beispiele:<br />
R n+1 (x 0 , x) = f(n+1) (ξ)<br />
(n + 1)! (x − x 0) n+1 = 1 ∫ x<br />
(x − t) n f (n+1) (t)dt<br />
n! x 0<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 30 –
5.4. NEWTON-Verfahren<br />
Funktion Taylor-Reihe Konvergenzbereich<br />
∑<br />
Sinus sin(x) = ∞ (−1) k<br />
(2k+1)! x2k+1 = x − x3 + x5 − x7 ± . . . ∞<br />
3! 5! 7!<br />
k=0<br />
∑<br />
Cosinus cos(x) = ∞ (−1) k<br />
(2k)! x2k = 1 − x2 + x4 − x6 ± . . . ∞<br />
2! 4! 6!<br />
k=0<br />
∑<br />
Logarithmus ln(1 + x) = ∞ (−1) k−1<br />
x k = x − x2 + x3 − x4 ± . . . −1 < x ≤ 1<br />
k<br />
2 3 4<br />
k=1<br />
∑<br />
ln(1 − x) = − ∞ (<br />
)<br />
1<br />
k xk = − x + x2 + x3 + x4 ± . . . −1 < x ≤ 1<br />
2 3 4<br />
5.4 NEWTON-Verfahren<br />
k=1<br />
In diesem Abschnitt soll das sog. Newton-Verfahren untersucht wer<strong>de</strong>n. Es dient zur numerischen<br />
Approximation von Nullstellen differenzierbarer Funktionen f(x). Gesucht ist also ein x ∗ mit:<br />
f(x ∗ ) = 0<br />
Man berechnet jeweils im aktuellen Punkt x n die Tangente t n (x) an <strong>de</strong>n Graphen und nimmt <strong>de</strong>ren<br />
Schnittpunkt x n+1 mit <strong>de</strong>r x-Achse als neuen Schätzwert für die zu suchen<strong>de</strong> Nullstelle x ∗ . Die<br />
Tangente hat folgen<strong>de</strong> Form:<br />
t n (x) = F ′ (x n ) · (x − x n ) + f(x n ) ! = 0.<br />
Daraus erhält man folgen<strong>de</strong> Bedingung für <strong>de</strong>n neuen Punkt x n+1 mit t(x n+1 ) = 0:<br />
x n+1 = x n + f(x n)<br />
f ′ (x n )<br />
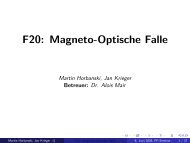
Die folgen<strong>de</strong> Abbildung veranschaulicht das Verfahren a am Beispiel <strong>de</strong>r Suche nach √ 4 = 2 mit<br />
<strong>de</strong>m Startpunkt x n = 4.<br />
14<br />
2<br />
f(x) = x - 4<br />
12<br />
10<br />
t 2(x)<br />
8<br />
6<br />
4<br />
2<br />
t 1(x)<br />
0<br />
x n+2<br />
x n+1<br />
x n<br />
1 2 3 4 5<br />
Folgen<strong>de</strong>r Satz beschreibt die Konvergenz <strong>de</strong>s Newton-Verfahrens:<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 31 –
5.5. Differentiation und Grenzprozesse<br />
NEWTON-Verfahren: Die zweimal stetig diff’bare Funktion f : I = [a, b] → R habe eine Nullstelle<br />
x ∗ ∈ (a, b) und es sei:<br />
Sei ρ > 0 so gewählt, dass:<br />
m := min<br />
a≤x≤b |f′ (x)| > 0,<br />
M := max<br />
a≤x≤b |f′′ (x)| .<br />
q := M 2m · ρ < 1 und K ρ(x ∗ ) ⊂ [a, b].<br />
Dann sind für je<strong>de</strong>n Startpunkt x 0 ∈ K ρ (x ∗ ) die Newton-Iterationen x n+1 = x n + f(xn)<br />
f ′ (x n)<br />
konvergieren gegen die Nullstelle x ∗ . Dabei gelten sie apriori-Abschätzung:<br />
<strong>de</strong>finiert und<br />
|x n − x ∗ | ≤ 2m M q(2n) , n ∈ N<br />
und die a posteriori-Abschätzung:<br />
|x n − x ∗ | ≤ 1 m |f(x n)| , n ∈ N.<br />
Bemerkungen: Das Problem ist, eine Umgebung <strong>de</strong>r Nullstelle zu fin<strong>de</strong>n, innerhalb <strong>de</strong>rer das Verfahren<br />
konvergiert. Ist eine solche Umgebung einmal gefun<strong>de</strong>n, konvergiert das Newton-Verfahren<br />
aufgrund <strong>de</strong>r ersten Fehlerabschätzung quadratisch gegen die Nullstelle.<br />
5.5 Differentiation und Grenzprozesse<br />
• Regeln von L’HOSPITAL: Es seien f, g zwei auf <strong>de</strong>m (beschränkten) Intervall I = (a, b)<br />
diff’bare Funktionen. Es gelte dort g ′ (x) ≠ 0 und es existiere <strong>de</strong>r Limes<br />
Dann gelten folgen<strong>de</strong> Regeln:<br />
f ′ (x)<br />
lim<br />
x↓a g ′ (x) =: c ∈ R<br />
1. Im Fall lim<br />
x↓a<br />
f(x) = lim<br />
x↓a<br />
g(x) = 0 ist g(x) ≠ 0 in I und es gilt:<br />
f(x)<br />
lim<br />
x↓a g(x) = c = lim f ′ (x)<br />
x↓a g ′ (x)<br />
2. Im Fall lim<br />
x↓a<br />
f(x) = lim<br />
x↓a<br />
g(x) = ±∞ ist g(x) ≠ 0 für a < x ≤ b und es gilt:<br />
f(x)<br />
lim<br />
x↓a g(x) = c = lim f ′ (x)<br />
x↓a g ′ (x)<br />
Analoge Aussagen gelten für x ↑ b und x → ±∞.<br />
Auch für bestimmte Produktausdrücke, <strong>de</strong>r Art:<br />
lim f(x) = 0, lim<br />
x→a<br />
kann mit <strong>de</strong>n L’Hospital’schen Regeln und <strong>de</strong>r Setzung<br />
eine Lösung fin<strong>de</strong>n.<br />
g(x) = ∞ ⇒ lim f(x) · g(x)<br />
x→a x→a<br />
f(x)<br />
lim f(x) · g(x) = lim ( )<br />
x→a x→a −1<br />
g(x)<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 32 –
5.5. Differentiation und Grenzprozesse<br />
• Stabilität <strong>de</strong>r Differenzierbarkeit: Sei (f n ) n∈N eine Folge stetig diff’barer Funktionen auf<br />
einem (beschränkten) Intervall I (offen o<strong>de</strong>r abgeschlossen), welche punktweise gegen eine<br />
Funktion f konvergiert. Ist die Folge <strong>de</strong>r Ableitungen (f ′ n) gleichmäßig konvergent gegen ein<br />
f ∗ , so ist auch f diff’bar und es gilt f ′ = f ∗ , d.h.:<br />
d<br />
( )<br />
lim<br />
dx<br />
f n = lim<br />
n→∞ n→∞ f′ n<br />
• Differentiation unendlicher Summen: Seien f k stetig diff’bare Funktionen auf <strong>de</strong>m beschränkten<br />
Intervall I (offen o<strong>de</strong>r abgeschlossen) mit Ableitungen f k ′ . Wenn die Partialsummen ∑ n<br />
k=1 f k<br />
punktweise konvergieren und die ∑ n<br />
k=1 f′ k auf I gleichmäßig konvergieren, so darf in <strong>de</strong>n zugehörigen<br />
Reihen gliedweise differenziert wer<strong>de</strong>n und es gilt:<br />
d<br />
dx<br />
∞∑<br />
f k =<br />
k=1<br />
∞∑<br />
f k.<br />
′<br />
k=1<br />
∑<br />
• Potenzreihe: Eine Potenzreihe ∞ c k (x − x 0 ) k mit Konvergenzradius ρ > 0 stellt ein in ihrem<br />
k=0<br />
Konvergenzintervall I = (x 0 − ρ, x 0 + ρ) diff’bare Funktion f dar; und zwar ist:<br />
f ′ (x) =<br />
∞∑<br />
kc k (x − x 0 ) k−1 .<br />
k=1<br />
Diese durch gliedweise Differentiation entstan<strong>de</strong>ne Potenzreihe hat ebenfalls <strong>de</strong>n Konvergenzradius<br />
ρ.<br />
• Raum C m [a, b]: Der normierte Raum C m [a, b] <strong>de</strong>r auf <strong>de</strong>m Intervall [a, b] m-mal stetig diff’baren<br />
Funktionen, versehen mit <strong>de</strong>r Norm ‖·‖ m;∞<br />
, ist vollständig.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 33 –
KAPITEL 6<br />
Integration im R<br />
6.1 Das RIEMANN-Integral<br />
6.1.1 Herleitung und Definition<br />
• Zerlegung, Feinheit und Verfeinerung: Eine Unterteilung o<strong>de</strong>r Zerlegung Z = {x 0 , ..., x n }<br />
eines (beschränkten Intervalles I = [a, b] zerlegt dieses in Teilintervalle I k := [x k−1 , x k ]. Es<br />
gilt:<br />
a =: x 0 < x 1 < ... < x n := b<br />
Eine solche Zerlegung I hat die Feinheit:<br />
h :=<br />
max |x k − x k−1 | .<br />
k=1,...,n<br />
Die Menge aller Zerlegungen eines Intervalles [a, b] wird mit Z(a, b) bezeichnet.<br />
Eine Verfeinerung Z ′ = {x 0 ′ , ..., x′ n} einer Zerlegung Z ∈ Z(a, b) enthält alle Zerlegungspunkte<br />
von Z und möglicherweise noch weitere. Für die Feinheit gilt mit <strong>de</strong>r Feinheit h von Z: h ′ :=<br />
max ∣ x<br />
′<br />
k − x k−1<br />
′ ∣ ≤ h<br />
k=1,...,n<br />
• Ober- und Untersumme: Für eine beschränkte Funktion f : I = [a, b] → R und eine Zerlegung<br />
Z ∈ Z(a, b) ist die Obersumme S Z (f) und Untersumme S Z (f) von f <strong>de</strong>finiert als:<br />
S Z (f) :=<br />
n∑<br />
sup f(x) · (x k − x k−1 ) , S Z (f) :=<br />
x∈I k<br />
k=1<br />
n∑<br />
inf f(x) · (x k − x k−1 )<br />
x∈I k<br />
k=1<br />
Daraus ergibt sich die Definition von Ober- und Unterintegral:<br />
∫ b<br />
a<br />
f(x)dx :=<br />
inf S Z (f), := sup S Z (f)<br />
Z∈Z(a,b)<br />
Z∈Z(a,b)<br />
Diese Definition entspricht <strong>de</strong>r Integration über eine Treppenfunktion zur Zerlegung Z, die f<br />
aproximiert. Die Definition von Ober- und Unterintegral macht Sinn, da <strong>de</strong>r Wert <strong>de</strong>r Obersumme<br />
mit steigen<strong>de</strong>r Feinheit abnimmt und <strong>de</strong>r Wert <strong>de</strong>r Untersumme entsprechend zunimmt, da<br />
die Funktion f immer besser aproximiert wird.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 34 –
6.1. Das RIEMANN-Integral<br />
• Größenabschätzung für Ober- und Untersumme: Für eine beschränkte Funktion f : [a, b] →<br />
R existieren das Ober-, sowie das Unterintegral und für je<strong>de</strong> Folge von Zerlegungen Z n ∈<br />
Z(a, b), n ∈ N mit Feinheit h n → 0 (n → ∞) gilt:<br />
∫ b<br />
lim S Z<br />
n→∞ n<br />
= f(x)dx<br />
a<br />
≤<br />
∫ b<br />
a<br />
f(x)dx = lim<br />
n→∞ S Z n<br />
• Eigenschaften von Ober- und Unterintegralen: Für Ober- und Unterintegrale gilt:<br />
∫ b ∫ b ∫ b<br />
(f(x) + g(x))dx ≥ f(x)dx + g(x)dx<br />
a<br />
a<br />
a<br />
α ≥ 0<br />
α ≥ 0<br />
α ≤ 0<br />
⇒<br />
⇒<br />
⇒<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
(f(x) + g(x))dx ≤<br />
αf(x)dx = α<br />
∫ b<br />
αf(x)dx = α<br />
a<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
f(x)dx<br />
f(x)dx<br />
∫ b<br />
αf(x)dx = α f(x)dx<br />
a<br />
f(x)dx +<br />
∫ b<br />
a<br />
g(x)dx<br />
• RIEMANN-Integral: Sind Ober- und Untersumme für eine beschränkte Funktion f : [a, b] →<br />
R gleich, so heißt <strong>de</strong>r gemeinsame Wert das (bestimmte) Riemann-Integral von f auf I := [a, b]<br />
und die Funktio wird Riemann-integrierbar genannt. Es gilt dann natürlich:<br />
∫ b<br />
6.1.2 Integrabilitätskriterien<br />
a<br />
f(x)dx =<br />
∫ b<br />
a<br />
f(x)dx =<br />
∫ b<br />
f(x)dx<br />
a<br />
• RIEMANN’sches Integrabilitätskriterium: Eine beschränkte Funktion f : [a, b] → R ist<br />
genau dann über I Riemann-integrierbar, wenn es zu beliebigem ɛ > 0 eine Zerlegung Z ∈<br />
Z(a, b) gibt, so dass für die zugehörigen Ober- und Untersummen gilt:<br />
∣<br />
∣S Z (f) − S Z (f) ∣ ∣ < ɛ<br />
• RIEMANN-Summe und Integrabilität: Für eine Funktion f : [a, b] → R und eine Zerlegung<br />
Z ∈ Z(a, b) wird die Riemann’sche Summe von f mit beliebigen ξ k ∈ [x k−1 , x k ] gebil<strong>de</strong>t<br />
durch:<br />
n∑<br />
RS Z (f) := f(ξ k ) · (x k − x k−1 )<br />
k=1<br />
Integrabilitätskriterium: Eine beschränkte Funktion f : [a, b] → R ist genau dann Riemannintegrierbar,<br />
wenn für je<strong>de</strong> Folge von Zerlegungen Z n ∈ Z(a, b) mit Feinheiten h n → 0 (n →<br />
N) alle zugehörigen Riemann’schen Summen konvergieren und <strong>de</strong>nselben Limes haben:<br />
RS Zn (f) →<br />
∫ b<br />
a<br />
f(x)dx<br />
(n → ∞).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 35 –
6.1. Das RIEMANN-Integral<br />
Die Riemann-Summen zu einer Zerlegung stellen gewissermaßen alle Zwischenschritte zwischen<br />
Ober- und Untersumme dar, Damit gibt es auch eine i<strong>de</strong>ale Folge von ξ k , mit <strong>de</strong>r RS Z (f)<br />
mit <strong>de</strong>m Integral übereinstimmt.<br />
• weitere Integrabilitätskriterien:<br />
1. Je<strong>de</strong> auf einem abgeschlossenen Intervall stetige Funktion ist Riemann-integrierbar.<br />
2. Je<strong>de</strong> auf einem abgeschlossenen Intervall (beschränkte) monotone Funktion ist Riemannintegrierbar.<br />
Nicht je<strong>de</strong> beschränkte Funktion ist R-integrierbar. Ein pathologisches Beispiel ist:<br />
{<br />
0, x ∈ Q<br />
f(x) :=<br />
1, sonst<br />
Hier gilt für je<strong>de</strong> Zerlegung (je<strong>de</strong>s Zerlegungsintervall enthält sicher a, b ∈ I k mit a ∈ Q und<br />
b ∈ R\Q):<br />
∫ b ∫ b<br />
f(x)dx ≤ S Z (f) = 0 < 1 = S Z (f) ≤ f(x)dx.<br />
a<br />
a<br />
• Zusammengesetzte Integrale: Eine (beschränkte) R-integrierbare Funktion f : [a, b] → R ist<br />
auch über je<strong>de</strong>m abgeschlossenen Teilintervall I ′ ⊂ [a, b] R-integrierbar. Insbeson<strong>de</strong>re lässt<br />
sich je<strong>de</strong>s Integral mithilfe eines beliebigen c ∈ (a, b) aufspalten zu:<br />
∫ b<br />
a<br />
∫ c<br />
a<br />
f(x)dx = f(x)dx +<br />
∫ b<br />
c<br />
f(x)dx<br />
Ist umgekehrt eine (beschränkte) Funktion f : [a, b] → R für ein c ∈ (a, b) R-integrierbare in<br />
<strong>de</strong>n Intervallen [a, c] und [c, b], so ist es auch auf [a, b] R-integrierbar.<br />
• Stückweise RIEMANN-Integrierbarkeit: Eine beschränkte Funktion f : I = [a, b] → R,<br />
welche bzgl. einer Zerlegung Z = {x 0 , ..., x n } ∈ Z(a, b) von I stückweise stetig und stückweise<br />
monoton (also monoton und stetig auf allen Teilintervallen I k ) ist über I R-integrierbar und es<br />
gilt:<br />
n∑<br />
∫ xk<br />
f(x)dx = f(x)dx.<br />
x k−1<br />
∫ b<br />
a<br />
k=1<br />
• Einige RIEMANN-Integrierbare Funktionen: Es seien f, g : [a, b] → R (beschränkte) R-<br />
integrierbare Funktionen. Dann gilt:<br />
1. Die Funktionen f + := max {f, 0} und f − := min {f, 0} sind R-integrierbar.<br />
2. Der Absolutbetrag ist R-integrierbar mit: ∣ ∫ ∣<br />
b ∣∣ f(x)dx ∫ b<br />
a ≤ |f(x)| dx<br />
a<br />
3. Für je<strong>de</strong>s p ≥ 1 ist |f| p R-integrierbar.<br />
4. Das Produkt fg ist R-integrierbar.<br />
Die Beweise funktionieren je über eine Abschätzung <strong>de</strong>r Ober- und Untersummen <strong>de</strong>r neuen<br />
Funktionen durch die alten. Das Produkt fg folgt aus <strong>de</strong>r Beziehung fg =<br />
((f 1 + g) 2 − (f − g) 2)<br />
4<br />
und 3. Bei 2 beachte man die Ähnlichkeit zur Dreiecksungleichung |a + b| ≤ |a| + |b|.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 36 –
6.1. Das RIEMANN-Integral<br />
• Satz von LEBESGUE: Die Funktion f : [a, b] → R ist genau dann Riemann-Integrierbar, wenn<br />
sie auf [a, b] beschränkt und fast überall stetig ist.<br />
• Integration komplexer Funktionen: Auch Funktionen f : [a, b] ⊂ R → C sind Riemannintegrierbar,<br />
durch die Setzung:<br />
∫ b<br />
a<br />
f(x)dx =<br />
∫ b<br />
a<br />
∫ b<br />
Re f(x)dx + i Im f(x)dx<br />
a<br />
6.1.3 Eigenschaften <strong>de</strong>s RIEMANN-Integrals<br />
• Linearität <strong>de</strong>s RIEMANN-Integrals: Sind f, g : [a, b] → R R-integrierbare Funktionen, so ist<br />
auch je<strong>de</strong> Linearkombination αf + βg mit α, β ∈ R R-integrierbar und es gilt:<br />
∫ b<br />
a<br />
∫ b ∫ b<br />
(αf(x) + βg(x)) dx = α f(x)dx + β g(x)dx<br />
a<br />
a<br />
• Monotonie <strong>de</strong>s RIEMAN-Integrals: Seien f, g : [a, b] → R (beschränkte) R-integrierbare<br />
Funktionen mit g(x) ≥ f(x), x ∈ [a, b]. Dann gilt auch:<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
g(x)dx ≥ f(x)dx.<br />
• Abschätzung durch Rechtecke: Für eine (beschränkte) R-integrierbare Funktion f : [a, b] →<br />
R mit m ≤ f(x) ≤ M, ∀x ∈ [a, b] gilt:<br />
m · (b − a) ≤<br />
∫ b<br />
a<br />
f(x)dx ≤ M · (a − b).<br />
• Definitheit <strong>de</strong>s RIEMANN-Integrals: Sei f : [a, b] → R eine stetige Funktion mit f(x) ≥<br />
0, x ∈ [a, b]. Dann gilt:<br />
∫ b<br />
f(x)dx = 0 ⇒ f ≡ 0<br />
a<br />
6.1.4 Das unbestimmte RIEMANN-Integral<br />
• Unbestimmtes Integral: Eine FUnktion F : [a, b] → R heißt unbestimmtes Integral (o<strong>de</strong>r<br />
Stammfunktion) einer Funktion f : [a, b] → R, wenn sie diff’bar ist und wenn gilt:<br />
F ′ (x) = f(x), ∀x ∈ [a, b]<br />
Man schreibt dann:<br />
∫<br />
F(x) = f(x)dx<br />
Die Stammfunktion ist immer nur bis auf eine additive Konstante C bestimmt, also eigentlich:<br />
∫<br />
f(x)dx = F(x) + C.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 37 –
6.1. Das RIEMANN-Integral<br />
• Fundamentalsatz:<br />
1. Für eine stetige Funktion f : [a, b] → R ist das bestimmte Riemann-Integral<br />
F(x) :=<br />
∫ x<br />
a<br />
f(y)dy, x ∈ [a, b]<br />
aufgefaßt als Funktion <strong>de</strong>r oberen Grenze x eine Stammfunktion von f. Je<strong>de</strong> weitere<br />
Stammfunktion von f unterschei<strong>de</strong>t sich von F nur durch eine additive Konstante.<br />
2. Ist umgekehrt die Funktion F : [a, b] → R Stammfunktion einer stetigen Funktion f, so<br />
gilt:<br />
∫ b<br />
a<br />
f(x)dx = F(x) ∣ b := F(b) − F(a).<br />
a<br />
Dieser Satz besagt, dass Integration und Differentiation zueinan<strong>de</strong>r inverse Prozesse sind:<br />
d<br />
dx<br />
∫ x<br />
a<br />
f(y)dy = f(x),<br />
∫ x<br />
a<br />
f ′ (y)dy = f(x) − f(a)<br />
}{{}<br />
= const<br />
6.1.5 Berechnung von Integralen<br />
• Partielle Integration: Seien f, g : I → R zwei stetig diff’bare Funktionen. Dann gilt:<br />
∫ b<br />
a<br />
f(x)g ′ (x)dx = (fg)(x) ∣ ∫ b b − f ′ (x)g(x)dx<br />
a<br />
a<br />
Die Formel folgt direkt aus <strong>de</strong>r Integration <strong>de</strong>r Produktregel für die Differentitaion: (fg) ′ (x) =<br />
f ′ (x)g(x) + f(x)g ′ (x).<br />
• Substitutionsregel: Seien f : I → R eine stetige und ϕ : [a, b] → I eine stetig diff’bare<br />
Funktion. Dann gilt die sog. Substitutionsregel:<br />
∫ b<br />
a<br />
Es gibt die instruktivere Schreibweise:<br />
f(ϕ(y))ϕ ′ (y)dy =<br />
∫ ϕ(b)<br />
ϕ(a)<br />
f(x)dx<br />
∫ b<br />
a<br />
f(ϕ(y))dϕ(y) =<br />
∫ ϕ(b)<br />
ϕ(a)<br />
f(x)dx;<br />
dϕ(y) = ϕ ′ (y)dy<br />
Oft<br />
∫<br />
wen<strong>de</strong>t man obige Regel so an, dass man zu einer gegebenen, zu integrieren<strong>de</strong>n Funktion<br />
b<br />
f(x)dx eine passen<strong>de</strong> Funktion ϕ(y) sucht, mit <strong>de</strong>r sich das Integral nach <strong>de</strong>r Substitutions-<br />
a<br />
regel leicht lösen lässt. Man setzt dann x := ϕ(y) und dx<br />
dy<br />
ϕ ′ (y) · dy. Damit erhält man dann:<br />
∫ b<br />
a<br />
f(x)dx =<br />
∫ ϕ(b)<br />
ϕ(a)<br />
f(ϕ(y))dϕ(y) =<br />
∫ ϕ(b)<br />
ϕ(a)<br />
= dϕ(y)<br />
dy<br />
= ϕ ′ (y) ⇒ dx =<br />
f(ϕ(y))ϕ ′ (y)dy<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 38 –
6.1. Das RIEMANN-Integral<br />
Beispiel I:<br />
π/2<br />
∫<br />
−π/2<br />
∫ π/2<br />
dx √<br />
1−x 2<br />
−π/2<br />
löst man mit x := ϕ(y) = sin(y) und damit dx = cos(y)dy auf, zu:<br />
∫<br />
dx 1 ∫<br />
√ = 1<br />
1<br />
√ cos(y)dy = cos y<br />
1 − x<br />
2<br />
−1 1 − sin(y)<br />
2<br />
−1 cos y dy = 2<br />
Beispiel II: An<strong>de</strong>rsherum sucht man z.B. die Lösung für<br />
∫<br />
(sin(x)) 3·cos(x)·dx. Hier <strong>de</strong>finiert<br />
man ϕ(x) = sin(x). Damit ergibt sich dϕ(x)<br />
dx<br />
= cos(x) ⇒ dϕ(x) = cos(x)dx. Mit diesen<br />
Vorgaben sieht man:<br />
∫<br />
π/4<br />
6.1.6 Kurvenlängen<br />
0<br />
(sin(x)) 3 · cos(x) · dx =<br />
} {{ } } {{ }<br />
=ϕ(x) =dϕ(x)<br />
ϕ(π/4)= 1 √<br />
∫ 2 2<br />
ϕ(0)=0<br />
π/4<br />
0<br />
ϕ(x) 3 · dϕ(x) =<br />
[ 1<br />
4 ϕ4 ] 1<br />
2<br />
√<br />
2<br />
0<br />
= 1 16<br />
• Parametrisierte Kurven: Es seien ϕ, ψ zwei stetige Funktionen eines Parameters t ∈ [a, b].<br />
Sind die Punkte <strong>de</strong>r Ebene (ϕ(t), ψ(t)) , t ∈ [a, b] alle verschie<strong>de</strong>n, so nennt man die Punktemenge<br />
Γ := {(ϕ(t), ψ(t)) |t ∈ [a, b]}<br />
ein ebenes Kurvenstück mit Parameterdarstellung {ϕ, φ}.<br />
• Polygonzugverfahren: Zur Längenberechnung wird ein Kurvenzug durch gera<strong>de</strong> Linien zwischen<br />
je zwei Stützstellen P k = (ϕ(t k ), ψ(t k )) und P k+1 = (ϕ(t k+1 ), ψ(t k+1 )) gezogen. Die<br />
Länge eines Teilstückes ist über <strong>de</strong>n euklidischen Abstand <strong>de</strong>finiert. Damit ergibt sich die Länge<br />
eines Polygonzuges |p Z (Γ)| zu einer gegebenen Zerlegung Z = {t 0 , ..., t n } zu:<br />
|p Z (Γ)| :=<br />
n∑<br />
k=1<br />
√<br />
(ϕ(t k ) − ϕ(t k−1 )) 2 + (ψ(t k ) − ψ(t k−1 )) 2<br />
• Rektifizierbarkeit und Länge einer Kurve Haben die Längen aller Polygonzüge p Z (Γ) zu<br />
einem Kurvenstück Γ eine (endliche) obere Grenze, so heißt Γ rektifizierbar mit <strong>de</strong>r Länge:<br />
|Γ| :=<br />
∑ |p Z (Γ)|<br />
Z∈Z(a,b)<br />
• Kurvenlänge: Ist die Parameterdarstellung <strong>de</strong>s Kurvenstückes Γ stetig diff’bar, so ist es rektifizierbar<br />
und seine Länge ist gegeben durch:<br />
|Γ| =<br />
∫ b<br />
a<br />
√<br />
ϕ′ (t) 2 + ψ ′ (t) 2 dt<br />
Die obige Formel folgt aus <strong>de</strong>r bereits angegebenen Summendarstellung unter Erweiterung mit<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 39 –
6.2. Mittelwertsätze<br />
t k −t k−1<br />
t k −t k−1<br />
= 1 und dann nach <strong>de</strong>m Mittelwertsatz und Grenzübergang:<br />
|p Z (Γ)| :=<br />
=<br />
=<br />
n∑<br />
k=1<br />
√<br />
(ϕ(t k ) − ϕ(t k−1 )) 2 + (ψ(t k ) − ψ(t k−1 )) 2 =<br />
n∑<br />
(t k − t k−1 ) ·<br />
k=1<br />
√ (ϕ(tk ) 2 ( ) 2<br />
) − ϕ(t k−1 ) ψ(tk ) − ψ(t k−1 )<br />
+<br />
=<br />
t k − t k−1 t k − t k−1<br />
n∑<br />
(t k − t k−1 ) · √ϕ ′ (τ k ) 2 + ψ ′ (τ k ) 2<br />
k=1<br />
6.2 Mittelwertsätze<br />
• 1. Mittelwertsatz: Es seien f : I = [a, b] → R stetig und g : I → R R-integrierbar und g habe<br />
in I keinen Vorzeichenwechsel. Dann gibt es eine Zwischenstelle ξ ∈ [a, b], so dass gilt:<br />
∫ b<br />
a<br />
∫ b<br />
f(x)g(x)dx = f(ξ) g(x)dx.<br />
a<br />
Korollar: Sei f : I = [a, b] → R stetig. Dann gilt als Spezialfall <strong>de</strong>s 1. Mittelwertsatzes mit<br />
g = 1, mit einem ξ ∈ I:<br />
∫ b<br />
f(x)dx = f(ξ) · (b − a)<br />
a<br />
Dies be<strong>de</strong>utet anschaulich, dass es ein ξ ∈ [a, b] gibt, sodass f(ξ) gera<strong>de</strong> <strong>de</strong>n Mittelwert <strong>de</strong>r<br />
Funktion über <strong>de</strong>m Intervall [a, b] darstellt:<br />
f(ξ) = 1 ∫ b<br />
b − a · f(x)dx<br />
a<br />
Den esten 1. Mittelwertsatz kann man auch als Verallgemeinerung dieses Korollars auffassen.<br />
Man bezeichnet dann die Funktion g(x) als Gewichtsfunktion.<br />
Korollar: Seien f : I = [a, b] → R mit m ≤ f(x) ≤ M,<br />
mit g ≥ 0. Dann gilt:<br />
x ∈ I und g : I → R R-integrierbar<br />
∫ b ∫ b ∫ b<br />
m g(x)dx ≤ f(x)g(x)dx ≤ M g(x)dx<br />
a<br />
a<br />
a<br />
Dies liefert eine Abschätzung für das Integral ∫ b<br />
f(x)·g(x)dx aufgrund <strong>de</strong>s Integrals über g(x)<br />
a<br />
und kann zu <strong>de</strong>ssen Berechnung herangezogen wer<strong>de</strong>n.<br />
• 2. Mittelwertsatz: Es seien f : I = [a, b] → R monoton und g : I → R R-integrierbar. Dann<br />
gibt es eine Zwischenstelle ξ ∈ [a, b], so dass gilt:<br />
∫ b<br />
a<br />
∫ ξ ∫ b<br />
f(x)g(x)dx = f(a) g(x)dx + f(b) g(x)dx.<br />
a<br />
ξ<br />
Dies liefert ebenfalls eine Abschätzung für das Integral ∫ b<br />
f(x) · g(x)dx aufgrund <strong>de</strong>s Integrals<br />
a<br />
über g(x) und kann zu <strong>de</strong>ssen Berechnung herangezogen wer<strong>de</strong>n.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 40 –
6.3. Uneigentliche Integrale<br />
6.3 Uneigentliche Integrale<br />
• Uneigentliches RIEMANN-Integral: Sei f : (a, b] → R eine auf <strong>de</strong>m halboffenen Intervall<br />
(a, b] aber nicht auf <strong>de</strong>m Abschluss [a, b] integrierbare Funktion. Existiert für je<strong>de</strong> Folge von<br />
Punkten a n ∈ (a, b] <strong>de</strong>r Limes<br />
∫ b<br />
f(x)dx := lim f(x)dx,<br />
an↓a<br />
a n<br />
∫ b<br />
a<br />
so ist dieser unabhängig von <strong>de</strong>r Wahl <strong>de</strong>r Folge (a n ) n∈N und heißt uneigentliches Integral von<br />
f über [a, b].<br />
• Uneigentliches Integral von Beträgen: Sei f : (a, b] → R auf (a, b] aber nicht auf [a, b]<br />
integrierbar. Existiert dann das uneigentliche Integral von |f| über [a, b], so existiert auch das<br />
uneigentliche Integral von f über [a, b] und es gilt:<br />
∫ b ∫ b ∣ f(x)dx<br />
∣ ≤ |f(x)| dx.<br />
a<br />
a<br />
Damit hat das uneigentliche Integral von Beträgen das gleiche VErhalten, wie das eigentliche<br />
Riemann-Integral.<br />
• Uneigentliches RIEMANN-Integral auf unendlichen Intervallen: Sei f : [a, ∞) → R eine<br />
auf <strong>de</strong>m halboffenen unendlichen Intervall [a, ∞) lokal integrierbare Funktion. Existiert für<br />
je<strong>de</strong> Folge von Punkten b n ∈ [a, ∞) <strong>de</strong>r Limes<br />
∫ ∞<br />
a<br />
f(x)dx :=<br />
lim<br />
b n→∞<br />
∫ bn<br />
a<br />
f(x)dx,<br />
so ist dieser unabhängig von <strong>de</strong>r Wahl <strong>de</strong>r Folge (b n ) n∈N und heißt uneigentliches Integral von<br />
f über [a, ∞).<br />
Auch hier folgt aus <strong>de</strong>r Existenz <strong>de</strong>s uneigentlichen Integrals von |f| über [a, ∞) die Existenz<br />
<strong>de</strong>s uneigentlichen Integrals von f und die Ungleichung:<br />
∫ ∞ ∫ ∞ ∣ f(x)dx<br />
∣ ≤ |f(x)| dx.<br />
a<br />
a<br />
• Uneigentliches RIEMANN-Integral von Produkten: Sei f : [a, ∞) → R in [a, ∞) integrierbar<br />
mit<br />
sup<br />
∣ f(t)dt<br />
∣ = M < ∞.<br />
x≥a<br />
∫ x<br />
a<br />
Ferner sei g : [a, ∞) → R + diff’bar und monoton gegen Null fallend. Dann existiert ein<br />
uneigentliches Integral<br />
∫ ∞<br />
a<br />
∫ x<br />
f(x)g(x)dx = lim f(x)g(x)dx.<br />
x→∞<br />
a<br />
• Beziehung zwischen unendlichen Reihen und uneigentlichen Integralen: Es sei f : [n 0 , ∞) →<br />
R eine stetige, positive, monoton fallen<strong>de</strong> Funktion. Dann gilt:<br />
∞∑<br />
∫ ∞<br />
f(k) < ∞ ⇔ f(x)dx < ∞.<br />
k=n<br />
n 0 0<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 41 –
6.4. Integration und Grenzprozesse<br />
6.4 Integration und Grenzprozesse<br />
• Gleichmäßige Konvergenz: Die Folge (f n ) n∈N stetiger Funktionen f n : I → R konvergiere<br />
auf einem Intervall I = [a, b] gleichmäßig gegen eine Funktion f : I → R. Dann ist die<br />
Grenzfunktion ebenfalls stetig und es gilt:<br />
∫ b ∫ b<br />
lim f n (x)dx = lim f n(x)dx.<br />
n→∞<br />
a<br />
a<br />
n→∞<br />
• Integration und unendliche Reihen: Für eine Folge stetiger FUnktionen f k : I → R, k ∈ N<br />
konvergiere die Reihe ∼ ∞ k=1 f k auf einem Intervall I = [a, b] gleichmäßig. Dann stellt die Reihe<br />
eine integrierbare Funktion dar und es gilt:<br />
∫ b<br />
a<br />
∞∑<br />
f k (x)dx =<br />
k=1<br />
∞∑<br />
k=1<br />
∫ b<br />
a<br />
f k (x)dx.<br />
D.h. Man darf in <strong>de</strong>r Reihe gliedweise integrieren.<br />
∑<br />
• Potenzreihe: Eine Potenzreihe ∞ c k (x − x 0 ) k habe <strong>de</strong>n Konvergenzradius ρ > 0; sie stellt<br />
k=0<br />
also auf <strong>de</strong>m Intervall I = (x 0 − ρ, x 0 + ρ) eine stetige Funktion dar. Deren Stammfunktion<br />
erhält man dann durch gliedweise Integration und diese hat <strong>de</strong>n selben Konvergenzradius:<br />
∫<br />
∑ ∞<br />
c k (x − x 0 ) k dx =<br />
k=0<br />
∞∑<br />
k=0<br />
c k<br />
k + 1 (x − x 0) k+1 + C<br />
• Monotone Konvergenz: Die Folge (f n ) n∈N von auf einem beschränkten Intervall I = [a, b)<br />
(uneigentlich) integrierbaren Funktionen f n : I → R konvergiere punktweise gegen eine Funktion<br />
f : I → R. Ist die Konvergenz f n → f monoton wachsend und ist f ebenfalls (uneigentlich)<br />
integrierbar, so gilt:<br />
∫ b ∫ b<br />
lim f n (x)dx =<br />
n→∞<br />
a<br />
a<br />
lim f n(x)dx<br />
n→∞<br />
• Beschränkte Konvergenz: Die Folge (f n ) n∈N von auf einem Intervall I = [a, b) o<strong>de</strong>r I =<br />
[a, ∞) (uneigentlich) integrierbaren Funktionen f n : I → R konvergiere punktweise gegen<br />
eine Funktion f : I → R. Ist die Grenzfunktion f ebenfallls (uneigentlich) integrierbar und<br />
sind die Funktionen f n gleichmäßig beschränkt durch eine auf I (uneigentlich) integrierbare<br />
Funktion g : I → R, d.h. |f n (x)| ≤ g(x), x ∈ I, so gilt ebenfalls:<br />
∫ b ∫ b<br />
lim f n (x)dx = lim f n(x)dx<br />
n→∞<br />
a<br />
a<br />
n→∞<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 42 –
KAPITEL 7<br />
FOURIER-<strong>Analysis</strong><br />
7.1 Der Funktionenraum R[a, b]<br />
• Stückweise Stetigkeit: Eine Funktion f : [a, b] → K heißt stückweise stetig, wenn sie in<br />
[a, b] bis auf endlich viele Ausnahmestellen stetig und beschränkt ist und wenn in je<strong>de</strong>r dieser<br />
Unstetigkeitsstellen ξ ∈ [a, b] die links- und rechtsseitigen Grenzwerte f(ξ ± ) := lim f(ξ ± h)<br />
k↓0<br />
existieren. In <strong>de</strong>n Ausnahmestellen ξ ∈ (a, b) sei gesetzt:<br />
f(ξ) := f(ξ −) + f(ξ + )<br />
.<br />
2<br />
Die obige Setzung hat keinen Einfluss auf <strong>de</strong>n Wert <strong>de</strong>s Riemann-Integrals. Anschaulich wird<br />
in ξ die Funktion auf <strong>de</strong>n Mittelwert zwischen <strong>de</strong>n zwei Grenzwerten gesetzt.<br />
• Der Vektorraum R[a, b]: Die Menge <strong>de</strong>r in obigem Sinne auf [a, b] stückweise stetigen<br />
(Riemann-integrierbaren) Funktionen bil<strong>de</strong>n offenbar einen Vektorraum, <strong>de</strong>r mit R[a, b] bezeichnet<br />
wird.<br />
Auf diesem Vektorraum <strong>de</strong>finiert die Sesquilinearform (komplexe Konjugation: a + ib = a −<br />
ib):<br />
(f, g) :=<br />
∫ b<br />
a<br />
f(x)g(x)dx<br />
das sog. L 2 -Skalarprodukt mit folgen<strong>de</strong>n Eigenschaften:<br />
1. Linearitätseigenschaften:<br />
(αf 1 + βf 2 , g) = α(f 1 , g) + β(f 2 , g) (f, αg 1 + βg 2 ) = α(f, g 1 ) + β(f, g 2 )<br />
2. Symmetrieeigenschaften: (f, g) = (g, f)<br />
3. Semi<strong>de</strong>finitheit: (f, f) ≥ 0<br />
4. Es gilt die SCHARZ’sche Ungleichung:<br />
∣ (f, g)<br />
∣ ∣<br />
2<br />
≤ (f, f) · (g, g).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 43 –
7.2. FOURIER-Entwicklung<br />
Durch folgen<strong>de</strong> Setzung <strong>de</strong>finiert man die sog. L 2 -Norm auf R[a, b]:<br />
‖f‖ := √ (f, f)<br />
Den Begriff <strong>de</strong>r Orthogonalität zweier Funktionen f, g ∈ R[a, b] <strong>de</strong>finiert man durch die Eigenschaft:<br />
(f, g) = 0<br />
• L 2 -Konvergenz bzw. Konvergenz im quadratischen Mittel: Mit Hilfe <strong>de</strong>r L 2 -Norm ‖ · ‖ läst<br />
sich die Konvergenz im quadratischen Mittel von Funktionen f n ∈ R[a, b] gegen eine Funktion<br />
f ∈ R[a, b] erklären:<br />
f n → L 2 f ⇔ ‖f n − f‖ → 0 (n → ∞).<br />
Dies be<strong>de</strong>utet, dass das quadratische Mittel <strong>de</strong>r Abweichung zwischen f n und f gegen Null<br />
geht:<br />
∫ b<br />
|f n (x) − f(x)| 2 dx → 0 (n → ∞).<br />
a<br />
Mit folgen<strong>de</strong>r Abschätzung zeigt man, dass die gleichmäßige Konvergenz von f n gegen f auch<br />
die L 2 -Konvergenz impliziert. Umgekehrt ist das nicht unbedingt richtig:<br />
√ ∫ b<br />
a<br />
‖f n − f‖ =<br />
|f n (x) − f(x)| 2 dx ≤ max |f n (x) − f(x)| · √b<br />
− a<br />
x∈[a,b]<br />
Gegenbeispiel: Die Funktionenfolge f n (x) = x n konvergiert auf [0, 1] punktweise nicht gegen<br />
die Nullfunktion, weil f n (1) =, ∀n ∈ N gilt. Sie konvergiert aber im quadratischen Mittel<br />
gegen die Nullfunktion:<br />
‖f n − 0‖ 2 =<br />
∫ 1<br />
(x 2n − 0)dx =<br />
0<br />
∣<br />
1 ∣∣∣<br />
1<br />
2n + 1 x2n+1<br />
0<br />
≤<br />
1<br />
2n + 1<br />
→ 0 (n → ∞)<br />
• Orthogonalsystem trigonometrischer Funktionen auf R[0, 2π]: Die trigonometrischen Funktionen<br />
c 0 (x) := 1, c k (x) := cos(k · x), s l (x) = sin(l · x), (k, l ∈ N)<br />
bil<strong>de</strong>n bzgl. <strong>de</strong>s L 2 -Skalarproduktes ein Orthogonalsystem in R[0, 2π]. Es gilt:<br />
(c k , s l ) = 0, (c k , c l ) = π · δ kl , (s k , s l ) = π · δ kl , k, l ∈ N<br />
7.2 FOURIER-Entwicklung<br />
• FOURIER-Entwicklung in sin / cos-Funktionen: Für eine beliebige Funktion f ∈ R[0, 2π]<br />
<strong>de</strong>finiert man die zugehörige Fourier-Summe durch:<br />
F f n(x) := 1 2 a 0 +<br />
n∑<br />
{a k cos(kx) + b k sin(kx)} .<br />
k=1<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 44 –
7.2. FOURIER-Entwicklung<br />
Dabei sind die Koeffizienten bestimmt durch:<br />
a 0 := 1 π<br />
∫ 2π<br />
0<br />
f(x)dx;<br />
a k := 1 π<br />
∫ 2π<br />
0<br />
f(x) cos(kx)dx;<br />
b k := 1 π<br />
∫ 2π<br />
0<br />
f(x) sin(kx)dx;<br />
Zur Berechnung <strong>de</strong>r Koeffizienten wird jeweils das Skalarprodukt a k = 1 π (f, c k), bzw. b k =<br />
1<br />
π (f, s k) berechnet. Das entspricht “geometrisch“ <strong>de</strong>r Projektion von f auf <strong>de</strong>n Basisvektor<br />
c k , s k <strong>de</strong>s Funktionenraumes. Im wesentlichen wird also die Darstellung <strong>de</strong>r Funktion f ∈<br />
R[a, b], bezüglich <strong>de</strong>s unendlichen Erzeugen<strong>de</strong>nsystems c k , s k , k ∈ N von R[a, b] berechnet.<br />
• FOURIER-Entwicklung in e ikx : Für eine beliebige Funktion f ∈ R[0, 2π] <strong>de</strong>finiert man die<br />
zugehörige Fourier-Summe durch:<br />
F f n(x) :=<br />
n∑<br />
k=−n<br />
c k e ikx mit c k := 1<br />
2π<br />
∫ 2π<br />
o<br />
f(x)e −ikx dx; k ∈ Z.<br />
Im Falle <strong>de</strong>r Konvergenz heißt <strong>de</strong>r Limes <strong>de</strong>r Fourier-Summen, die Fourier-Reihe:<br />
F f ∞(x) :=<br />
∞∑<br />
k=−∞<br />
c k e ikx = lim<br />
n∑<br />
n→∞<br />
k=−n<br />
c k e ikx .<br />
Die folgen<strong>de</strong>n Betrachtungen beziehen sich auf die komplexe Definition <strong>de</strong>r Fourier-Reihen.<br />
Sie lässt sich über die Definition von sin und cos auf die erste Definition zurückführen und ist<br />
somit völlig Gleichwertig:<br />
cos(x) = 1 2<br />
(<br />
e ix + e −ix) ; sin(x) = 1 2i<br />
(<br />
e ix − e −ix)<br />
• Es sei f ∈ R[0, 2π] eine 2π-periodische Funktion mit <strong>de</strong>n Fourier-Koeffizienten c k , k ∈ Z.<br />
Dann gilt für alle n ∈ N:<br />
∥ n∑<br />
∥ f − F<br />
f<br />
n 2<br />
= ‖f‖ 2 − 2π |c k | 2<br />
• BESSEL’sche Ungleichung: Es sei f ∈ R[0, 2π] eine 2π-periodische Funktion mit <strong>de</strong>n Fourier-<br />
Koeffizienten c k , k ∈ Z. Dann konvergieren die Quadratsummen <strong>de</strong>r Fourier-Koeffizienten und<br />
es gilt:<br />
2π<br />
∞∑<br />
k=−∞<br />
|c k | 2 = lim<br />
n→∞ 2π<br />
n∑<br />
k=−n<br />
k=−n<br />
|c k | 2 ≤ ‖f‖ 2 =<br />
∫ b<br />
a<br />
f(x) 2 dx.<br />
Zusammen mit <strong>de</strong>r obigen Ungleichung ergibt sich aus <strong>de</strong>r Bessel’schen Ungleichung, dass:<br />
∥ f − F<br />
f<br />
n<br />
∥ ∥<br />
2<br />
→ 0 (n → ∞), wenn 2π<br />
∞<br />
∑<br />
k=−∞<br />
|c k | 2 → ‖f‖ 2 (n → ∞).<br />
Dies be<strong>de</strong>utet die L 2 -Konvergenz <strong>de</strong>r Fourierreihe F f n gegen die zugehörige Funktion f ∈<br />
R[0, 2π].<br />
• RIEMANN’sches Lemma: Sei f : [a, b] → R eine diff’bare Funktion. Für s ∈ R gilt:<br />
F(s) :=<br />
∫ b<br />
a<br />
f(x) sin(sx)dx → 0 (|s| → ∞).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 45 –
7.2. FOURIER-Entwicklung<br />
• Konvergenz einiger wichtiger Reihen:<br />
– Auf je<strong>de</strong>m Intervall [δ, 2π − δ] mit δ > 0 konvergiert die folgen<strong>de</strong> Reihe gleichmäßig:<br />
∞∑ sin(kx)<br />
= π − x .<br />
k 2<br />
k=1<br />
k=1<br />
– Die folgen<strong>de</strong> Reihe konvergiert gleichmäßig für x ∈ R. Insbeson<strong>de</strong>re gilt im Fall x = 0:<br />
∞∑<br />
( ) 2 ∞<br />
cos(kx) x − π<br />
= − π2<br />
k 2 2 12 ; x = 0 : ∑ 1<br />
k = π2<br />
2 6 .<br />
• Konvergenz <strong>de</strong>r FOURIER-Reihe gegen Treppenfunktionen: Sei f ∈ R[0, 2π] eine 2πperiodische<br />
Treppenfunktion. Dann konvergiert ihre Fourier-Reihe F f ∞ im quadratischen Mittel<br />
gegen f.<br />
• Vollständigkeitsrelation: Sei f ∈ R[0, 2π] eine 2π-periodische Funktion. Dann konvergiert<br />
ihre Fourier-Reihe im quadratischen Mittel gegen f und mit ihren Fourier-Koeffizienten c k gilt<br />
die sog. Vollständigkeitsrelation:<br />
∞∑<br />
2π |c k | 2 = ‖f‖ 2<br />
k=−∞<br />
Zum Beweis: Man konstruiert eine Einschließung <strong>de</strong>r Funktion f durch zwei Treppenfunktionen,<br />
von <strong>de</strong>nen eine die Funktion nach oben und eine nach unten abgrenzt.<br />
Achtung: Die L 2 -Konvergenz impliziert nicht die punktweise o<strong>de</strong>r gleichmäßige Konvergenz<br />
<strong>de</strong>r Reihe gegen die zugehörige Funktion f. Damit ist die Frage <strong>de</strong>r Darstellung <strong>de</strong>r Funktion<br />
durch ihre Fourier-Reihe (= punktweise Konvergenz) nicht ganz geklärt.<br />
• Ein Konvergenzkriterium für FOURIER-Reihen: Die Fourierreihe einer stetigen Funktion<br />
f ∈ R[0, 2π] konvergiert absolut und gleichmäßig gegen f, wenn für die Fourierkoeffizienten<br />
c k gilt:<br />
∑<br />
|c k | < ∞<br />
Dies folgt aus <strong>de</strong>r Abschätzung:<br />
∣<br />
n∑<br />
k=−n<br />
k∈Z<br />
c k e ikx ∣ ∣∣∣∣<br />
≤<br />
n∑<br />
k=−n<br />
|c k |<br />
k=1<br />
• Sei f ∈ R[0, 2π] eine 2π-periodische Funktion, die in [0, 2π] bis auf endlich viele Ausnahmestellen<br />
x 1 , ..., x m diff’bar ist, mit stückweise <strong>de</strong>finierter Ableitung ˜f ′ ∈ R[0, 2π]. Dann konvergiert<br />
die Fourier-Reihe von f auf ganz [0, 2π] punktweise gegen f und gleichmäßig auf je<strong>de</strong>m<br />
abgeschlossenen Teilintervall, auf <strong>de</strong>m f stetig ist. Insbeson<strong>de</strong>re gilt in je<strong>de</strong>r dieser Ausnahmestellen<br />
ξ := x k :<br />
F f n(x) → f(ξ −) + f(ξ + )<br />
(n → ∞).<br />
2<br />
Dabei sind f(ξ ± ) die links- bzw. rechtsseitigen Limites gegen die Unsettigkeitsstelle ξ:<br />
f(ξ ± ) := lim<br />
h↓0<br />
f(ξ ± h).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 46 –
Teil II<br />
<strong>Analysis</strong> 2: <strong>Analysis</strong> <strong>de</strong>s K n<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 47 –
KAPITEL 8<br />
Der n-dimensionale Zahlenraum K n<br />
8.1 Der euklidische Raum K n<br />
Viele bereits <strong>de</strong>finierte Begriffe übertragen sich (fast direkt) auf <strong>de</strong>n K n , wenn man statt <strong>de</strong>s Betrages<br />
eine auf K n <strong>de</strong>finierte Norm verwen<strong>de</strong>t. Das Standardbeispiel für eine solche Norm ist die euklidische<br />
Norm ‖·‖ 2<br />
.<br />
• Konvergente Folgen: Eine Folge von Vektoren (x (k) ) k∈N ⊂ K n heißt konvergent gegen ein<br />
x ∈ K n , wenn gilt: ∥ ∥x (k) − x ∥ ∥<br />
2<br />
→ 0 (k → ∞)<br />
Die geometrische Be<strong>de</strong>utung <strong>de</strong>r Konvergenz ist, dass je<strong>de</strong> ɛ-Umgebung von x fast alle Folgenelemente<br />
x (k) enthält.<br />
• CAUCHY-Folge: Eine Folge heßt Cauchy-Folge, wenn gilt:<br />
∀ɛ > 0 ∃N ɛ ∈ N : ∀k, l > N ɛ : ∥ x (k) − x (l)∥ ∥<br />
2<br />
< ɛ<br />
• Beschränkte Folgen: Eine Folge heißt beschränkt, wenn alle ihre Elemente in einer Kugelumgebung<br />
K R (0) um <strong>de</strong>n Nullpunkt liegen.<br />
• Häufungspunkt: Ein Punkt x ∈ K n heißt Häufungspunkt einer Menge M ⊂ K n , wenn je<strong>de</strong><br />
Umgebung von x min<strong>de</strong>stens einen Punkt aus M\{x} enthält.<br />
Die Menge <strong>de</strong>r Häufungspunkte von M wird mit H(M) bezeichnet. Ein Punkt x ∈ M\H(M)<br />
wird isoliert genannt.<br />
Ein isolierter Punkt x ist also kein Häufungspunkt einer Folge aus M. Das be<strong>de</strong>utet es gibt<br />
Umgebungen U ɛ (x), die nicht in M liegen.<br />
• Für eine Menge M ⊂ K n gilt:<br />
M ∪ H(M) = M.<br />
Eine Menge M ⊂ K n ist genau dann abgeschlossen, wenn sie alle ihre Häufungspunkte enthält.<br />
• Satz von BOLZANO-WEIERSTRASS:<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 48 –
8.2. Lineare Abbildungen auf <strong>de</strong>m K n<br />
1. Je<strong>de</strong> Cauchy-Folge in K n konvergiert, d.h.: Der euklidische Raum K n ist vollständig und<br />
somit ein Banach-Raum.<br />
2. Je<strong>de</strong> beschränkte Folge in K n besitzt eine konvergente Teilfolge (hat also min<strong>de</strong>stens<br />
einen Häufungspunkt.<br />
Analoge Aussagen gelten auch für Teilmengen <strong>de</strong>s K n . So hat etwa je<strong>de</strong> beschränkte Teilmenge<br />
<strong>de</strong>s K n einen Häufungspunkt. Diese zwei Aussagen gelten nur für endliche Vektorräume; für<br />
unendliche VRs (z.B. C[a, b], R[a, b]) sind sie im allgemeinen falsch.<br />
√<br />
• Produkträume: Auf <strong>de</strong>m Produktraum V = K n ×K n <strong>de</strong>finiert man mit ‖{x, y}‖ := ‖x‖ 2 + ‖y‖ 2<br />
eine natürliche Norm. Dieser Raum kann mit <strong>de</strong>m K 2n i<strong>de</strong>ntifiziert wer<strong>de</strong>n. Diese Konstruktion<br />
lässt sich auf (endlich dimensionale) Produkträume erweitern.<br />
8.2 Lineare Abbildungen auf <strong>de</strong>m K n<br />
• Reguläre Matrizen: Für Matrize A ∈ K n×n sind folgen<strong>de</strong> Aussagen äquivalent:<br />
1. A ist regulär.<br />
2. Ax = b ist für je<strong>de</strong>s b ∈ K n ein<strong>de</strong>utig lösbar.<br />
3. Ax = 0 ist nur durch x = 0 lösbar.<br />
4. Rang(A) = n.<br />
5. <strong>de</strong>t(A) ≠ 0.<br />
6. Alle Eigenwerte von A sind ungleich Null.<br />
• Gleiche Matrizen: Zwei Matrizen A, A ′ ∈ K n×n sind gleich, wenn Ax = A ′ x, ∀x ∈ K n .<br />
• Ähnliche Matrizen: Zwei Matrizen A, A ′<br />
Matrix T ∈ K n×n gilt: A ′ = T −1 AT<br />
∈ K n×n sind ähnlich, wenn mit einer regulären<br />
Ähnliche Matrizen sind also solche, die bezüglich zweier unterschiedlicher Basen die selbe<br />
lineare Abbildung darstellen. Ihre Eigenwerte sind gleich.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 49 –
KAPITEL 9<br />
Funktionen mehrerer Verän<strong>de</strong>rlicher<br />
9.1 Stetigkeit<br />
Im folgen<strong>de</strong>n wer<strong>de</strong>n Funktionen f : D ⊂ K n → K betrachtet, <strong>de</strong>ren Definitionsbereich offen ist.<br />
Auch sind die folgen<strong>de</strong>n Aussagen für beliebige Normen gültig, da alle Normen auf K n nach <strong>de</strong>m<br />
Satz über die Normäquivalenz gleich sind.<br />
• Bil<strong>de</strong>r und Urbil<strong>de</strong>r von stetigen Abbildungen: Für stetige Funktionen f : D ⊂ K n → K<br />
mit D offen gilt:<br />
1. Das Urbild f −1 (O) einer offenen Menge O ⊂ f(D) ist offen.<br />
2. Das Urbild f −1 (A) einer abgeschlossenen Menge A ⊂ f(D) ist abgeschlossen.<br />
3. Das Bild f(K) einer kompakten Menge K ⊂ D ist kompakt.<br />
4. Das Bilf f(M) einer zusammenhängen<strong>de</strong>n Menge M ⊂ D ist zusammenhängend.<br />
• Stetigkeit: Eine Funktion f : D → K n heißt stetig in einem Punkt a ∈ D, wenn für je<strong>de</strong> Folge<br />
(x (k) ) k∈N in D gilt:<br />
x (k) → a (k → ∞) ⇒ f(x (k) ) → f(a) (k → ∞)<br />
Sie heißt stetig in D, wenn sie in je<strong>de</strong>m Punkt aus D stetig ist.<br />
• Sätz über stetige Funktionen: Eine Funtion f : D → K n ist genau dann in einem Punkt a ∈ D<br />
stetig, wenn es zu je<strong>de</strong>m ɛ > 0 ein δ ɛ > 0 gibt, so dass für x ∈ D gilt:<br />
‖x − a‖ < δ ɛ ⇒ ‖f(x) − f(a)‖ < ɛ.<br />
Für zwei stetige Funktionen f, g : D → K n sind auch die Summe f + g, das Produkt f · g und<br />
im Falle g(x) ≠ 0, x ∈ D auch <strong>de</strong>r Quotient f/g stetig.<br />
• Satz von <strong>de</strong>r Beschränktheit: Eine stetige Funktion f : D ⊂ K n → K ist auf je<strong>de</strong>r kompakten<br />
Menge K ⊂ D beschränkt, d.h. Es gibt eine Konstante M K mit:<br />
sup |f(x)| ≤ M K .<br />
x∈K<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 50 –
9.2. Vektor- und Matrixwertige Funktionen<br />
• Satz vom Extremum: Eine stetige Funktion f : D ⊂ K n → K nimmt auf je<strong>de</strong>r kompakten<br />
Menge K ⊂ D ihr Maximum und Minimum an, d.h. Es gibt Punkte x max und x min , so dass:<br />
f(x max ) = sup f(x)<br />
x∈K<br />
f(x min ) = inf<br />
x∈K f(x)<br />
• Satz von <strong>de</strong>r gleichmäßigen Stetigkeit: Eine stetige Funktion f : D ⊂ K n → K ist auf einer<br />
kompakten Menge K ⊂ D gleichmäßig stetig, d.h. Zu je<strong>de</strong>m ɛ > 0 gibt es ein δ ɛ > 0, so dass<br />
für alle x, y ∈ K gilt:<br />
‖x − y‖ < δ ɛ ⇒ ‖f(x) − f(y)‖ < ɛ<br />
• punktweise und gleichmäßige Konvergenz: Eine Folge von Funktionen f k : D ⊂ K n →<br />
K, k ∈ N konvergiert punktweise gegen eine Funktion f : D → K, wenn für alle x ∈ D gilt:<br />
Sie konvergiert gleichmäßig, wenn gilt:<br />
f k (x) → f(x) (k → ∞)<br />
sup |f k (x) − f(x)| → 0 (k → ∞)<br />
x∈D<br />
• Satz von <strong>de</strong>r gleichmäßigen Konvergenz: Konvergiert eine Folge stetiger Funktionen f k :<br />
D ⊂ K n → K, k ∈ N gleichmäßig gegen eine Funktion f : D → K, so ist auch diese stetig.<br />
• Zwischenwertsatz: Sei f : D ⊂ R n → R stetig und D zusammenhängend. Dann nimmt f für<br />
je zwei Punkte a, b ∈ D je<strong>de</strong>n Wert zwischen f(a) und f(b) an. Insbeson<strong>de</strong>re hat f im Falle<br />
f(a)f(b) < 0 eine Nullstelle in D.<br />
Die Bedingung f(a)f(b) < 0 be<strong>de</strong>utet, dass einer <strong>de</strong>r Bei<strong>de</strong>n Funktionswerte größer und einer<br />
kleiner als Null ist.<br />
9.2 Vektor- und Matrixwertige Funktionen<br />
9.2.1 Vektorwertige Funktionen<br />
• LIPSCHITZ-Stetigkeit: Eine Abbildung f : D ⊂ K n → K n heißt Lipschitz-stetig, wenn mit<br />
einer sog. Lipschitz-Konstante L > 0 gilt:<br />
‖f(x) − f(y)‖ ≤ L · ‖x − y‖ , ∀x, y ∈ D.<br />
Im Falle L < 1 heißt f Kontraktion bzgl. <strong>de</strong>r gewählten Norm.<br />
• Starke Monotonie: Eine Abbildung f : D ⊂ R n → R n heißt stark monoton, wenn es eine<br />
Konstante m > 0 gibt, so dass für x, y ∈ D gilt:<br />
(<br />
f(x) − f(y), x − y<br />
)<br />
2 ≥ m · ‖x − y‖2 2 .<br />
• BANACH’scher Fixpunktsatz: Sei f : D ⊂ K n → K n eine Abbildung, für welche die folgen<strong>de</strong>n<br />
Bedingungen erfüllt sind:<br />
1. f bil<strong>de</strong>t eine abgeschlossene Teilmenge M ⊂ D in sich ab.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 51 –
9.2. Vektor- und Matrixwertige Funktionen<br />
2. Auf M ist f eine Kontraktion mit Lipschitzkonstante q ∈ (0, 1).<br />
Dann besitzt f in M genau einen Fixpunkt x ∗ und für je<strong>de</strong>n STartpunkt x (0) ∈ M konvergiert<br />
die Folge <strong>de</strong>r durch<br />
x (k) = f(x (k−1) ), k ∈ N<br />
<strong>de</strong>finierten Iteration x (k) ∈ M gegen diesen Fixpunkt x ∗ ∈ M mit <strong>de</strong>r Fehlerabschätzung:<br />
∥ x (k) − x ∗∥ ∥ ≤<br />
q k<br />
1 − q · ∥∥ x (1) − x (0)∥ ∥ .<br />
Man interessiert sich für Lösungen von Gleichungssystemen <strong>de</strong>r folgen<strong>de</strong>n Form:<br />
f 1 (x 1 , ..., x n ) = b 1<br />
f 2 (x 1 , ..., x n ) = b 2<br />
. .<br />
f n (x 1 , ..., x n ) = b n .<br />
Dies lässt sich natürlich mit f : D ⊂ K n → K n und x, b ∈ K n auch schreiben als:<br />
f(x) = b.<br />
Im Allgemeinen lässt sich ein solches Gleichungssystem nicht mehr in expliziter Form x =<br />
f −1 (b) lösen. Man kann dann aber versuchen eine Folge von Punkten x (n) zu konstruieren,<br />
die gegen die Lösung x ∗ konvergiert. Man macht dazu <strong>de</strong>n folgen<strong>de</strong>n Ansatz (mit geeignetem<br />
σ ∈ K\{0}):<br />
x (k+1) = g(x (k) ) := x (k) − σ · (f(x (k) ) − b ) .<br />
Ist x (k) eine i<strong>de</strong>ale Lösung, gilt also f(x (k) ) = b, so folgt daraus: x (k+1) = x (k) . Anschaulich<br />
korrigiert also obige Abbildung <strong>de</strong>n aktuellen Wert für die Lösung mit einem Maß für die<br />
Abweichung, die <strong>de</strong>r Wert vom I<strong>de</strong>alwert hat. σ sorgt dafür, dass es sich bei g(x (k) ) wirklich<br />
um eine Kontraktion han<strong>de</strong>lt. Angewen<strong>de</strong>t auf lineare Gleichungssysteme Ax = b, A ∈<br />
K n×n , x, b ∈ K n ergibt sich (siehe auch folgen<strong>de</strong>s Lemma):<br />
x (k+1) := x (k) − σ · (A<br />
x (k) ˙ − b )<br />
Das folgen<strong>de</strong> Lemma gibt einen Wert für σ: σ := 1<br />
‖A‖ ∞<br />
.<br />
• Korollar/Anwendung zum Fixpunktsatz: RICHARDSON-Iteration:<br />
Seien A ∈ K n×n hermitesch und positiv <strong>de</strong>finit und b ∈ K n gegeben. Dann konvergiert die<br />
Fixpunktiteration<br />
x (k) = x (k−1) − 1 · (Ax (k−1) − b ) , k ∈ N<br />
‖A‖ ∞<br />
für je<strong>de</strong>n Startwert x (0) gegen die Lösung <strong>de</strong>s Gleichungssystems<br />
Ax = b.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 52 –
9.2. Vektor- und Matrixwertige Funktionen<br />
• Korollar/Anwendung zum Fixpunktsatz: nichtlineare Gleichungen:<br />
Seien f : R n → R n eine Lipschitz-stetige, monotone Abbildung mit Lipschitz-Konstante L und<br />
b ∈ K n gegeben. Dann hat die Gleichung<br />
f(x) = b<br />
eine ein<strong>de</strong>utige Lösung x ∗ . Für je<strong>de</strong>n Startwert x (0) konvergiert die sukzessive Iteration<br />
x (k) = x (k−1) − θ · (f(x (k−1) ) − b ) ,<br />
k ∈ N<br />
für je<strong>de</strong>s θ ∈ (0, 2m<br />
L 2 ) gegen x ∗ .<br />
9.2.2 Matrixfunktionen<br />
• Sei A ∈ K n×n eine hermite’sche Matrix mit (ihrer Vielfachheit entsprechend oft gezählten)<br />
Eigenwerten λ 1 , ..., λ n ∈ R. Ist p ∈ P r ein Polynom, <strong>de</strong>ssen Nullstellen mit keinem <strong>de</strong>r Eigenwerte<br />
von A übereinstimmen, so ist die Matrix p(A) :=<br />
r ∑<br />
k=0<br />
a k A k regulär.<br />
• Exponential- und trigonometrische Funktionen von Matrizen: Da auch für Matrizen Exponentialsummen<br />
konvergieren, kann man <strong>de</strong>finieren:<br />
e A :=<br />
∞∑<br />
k=0<br />
1<br />
k! Ak ; cos(A) :=<br />
∞∑<br />
k=0<br />
(−1) k 1<br />
(2k)! A2k ; sin(A) :=<br />
∞∑<br />
k=0<br />
(−1) k 1<br />
(2k + 1)! A2k+1<br />
Achtung: Für die skalare Exponentialfunktion gilt die Beziehung e x · e y = e x+y . Diese ist<br />
für die matrixwertige Exponentialfunktion nicht mehr unbedingt gegeben. Im Beweis dieser<br />
Beziehung wird die Kommutativität <strong>de</strong>r Multiplikation (xy = yx) ausgenutzt, die bei Matrizen<br />
im Allgemeinen nicht gilt. Also:<br />
a A · a B ≠ e A+B .<br />
Die Funktionsgleichung gilt aber im Falle A = B: a B e B = e 2B = e B+B .<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 53 –
KAPITEL 10<br />
Differenzierbare Funktionen im K n<br />
10.1 Partielle Ableitung<br />
10.1.1 Begriffs<strong>de</strong>finition<br />
• Partielle Ableitung:<br />
1. Sei D ∈ R n eine offene Menge. Eine Funktion f : D → R heißt in einem Punkt x ∈<br />
D partiell differenzierbar bzgl. <strong>de</strong>r i-ten Koordinatenrichtung, falls <strong>de</strong>r folgen<strong>de</strong> Limes<br />
existiert.<br />
f(x + he (i) ) − f(x)<br />
lim<br />
h→0 h<br />
=:<br />
∂f<br />
∂x i<br />
(x) =: ∂ i f(x)<br />
Man nennt dann ∂ i f(x) die partielle Ableitung bzgl x i von f in x.<br />
2. Existieren in allen Punkten x ∈ D alle partiellen Ableitungen so heißt f partiell differenzierbar.<br />
Sind alle partielle Ableitungen stetige Funktionen auf D, so heißt f stetig partiell<br />
differenzierbar.<br />
3. Eine vektorwertige Funktion f = (f 1 , ..., f m ) : D → R m heißt (stetig) partiell differenzierbar,<br />
wenn alle ihre Komponenten f i (stetig) partiell differenzierbar sind.<br />
Beispiele:<br />
1. Abstandsfunktion:<br />
∑<br />
r(x) := ‖x‖ 2<br />
= √ n x 2 k<br />
⇒ ∂ i r(..., x i , ...) = 1 2 · 2x i<br />
2 √ ... + x 2 i + ... = x i<br />
r(x)<br />
k=1<br />
• Mehrfache partielle Differenzierbarkeit: Sind für eine partiell diff’bare Funktion f : D ⊂<br />
R n → R die partiellen Ableitungen ∂ i f : D → R wie<strong>de</strong>r partiell diff’bar, so heißt f zweimal<br />
partiell differenzierbar. Dieser Prozess lässt sich natürlich fortsetzen, solange die entstehen<strong>de</strong>n<br />
Ableitungen partiell diff’bar sind. Man schreibt:<br />
∂ i1 ...∂ ik f(x) =<br />
∂ ∂<br />
... f(x) =<br />
∂x i1 ∂x ik<br />
∂ k f<br />
∂x i1 ...x ik<br />
(x).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 54 –
10.1. Partielle Ableitung<br />
• Sei D ⊂ R n offen. Die Funktion f : D → R habe in einer Kugelumgebung K r (x) ⊂ D eines<br />
Punktes x ∈ D beschränkte partielle Ableitungen (o<strong>de</strong>r f sei überhaupt in K r (x) stetig partiell<br />
diff’bar):<br />
sup<br />
x∈K r(x)<br />
|∂ i f(x)| ≤ M, i = 1, ..., n.<br />
Dann ist f stetig im Punkt x.<br />
• Vertauschbarkeit <strong>de</strong>r Differentiationsreihenfolge: Sei D ⊂ R n offen. Die Funktion f : D →<br />
R sei in einer Umgebung K r (x) ⊂ D eines Punktes x ∈ D zweimal stetig partiell diff’bar.<br />
Dann gilt:<br />
∂ i ∂ j f(x) = ∂ j ∂ i f(x), i, j = 1, ..., n.<br />
Allgemein ist für eine k-mal stetig diff’bare Funktion die Reihenfolge <strong>de</strong>r partiellen Ableitungen<br />
vertauschbar.<br />
10.1.2 Begriffe <strong>de</strong>r Vektoranalysis<br />
• Gradient (Vektor <strong>de</strong>r ersten partiellen Ableitungen): Sei D ⊂ R n eine offene Menge und<br />
f : D → R eine partiell diff’bare Funktion. Der Vektor <strong>de</strong>r ersten partiellen Ableitungen heißt<br />
Gradient von f im Punkt x ∈ D:<br />
grad f(x) = ∇f(x) := ( ∂ 1 f(x), ..., ∂ n f(x) ) ∈ R n .<br />
Produktregel für <strong>de</strong>n Gradienten: ∇(f · g) = g · (∇f) + f · (∇g)<br />
• JACOBI-Matrix/Funktionalmatrix und Funktional<strong>de</strong>terminante: Sei D ⊂ R n eine offene<br />
Menge und f : D → R m eine partiell diff’bare Vektorfunktion. Die Matrix <strong>de</strong>r ersten partiellen<br />
Ableitungen heißt Funktionalmatrix von f im Punkt x ∈ D:<br />
J f (x) := ( ∂ j f i (x) ) n,m<br />
i,j=1 ∈ Rm×n .<br />
Man schreibt auch J f (x) = ∇f(x). Im Fall m = n wird die Determinante |J f (x)| von J f (x)<br />
Funktional-Determinante genannt.<br />
Matrixschreibweise:<br />
⎛ ⎞ ⎛<br />
⎞<br />
∇f 1 (x) ∂ 1 f 1 (x) · · · ∂ n f 1 (x)<br />
⎜ ⎟ ⎜<br />
⎟<br />
J f (x) := ⎝ . ⎠ = ⎝ .<br />
. ⎠ ∈ R m×n .<br />
∇f m (x) ∂ 1 f m (x) · · · ∂ n f m (x)<br />
• Divergenz: Sei D ⊂ R n eine offene Menge und f : D → R n eine partiell diff’bare Funktion.<br />
Die skalare Funktion<br />
wird Divergenz genannt.<br />
div f(x) = ∇ · f(x) := ∂ 1 f 1 (x) + ... + ∂ n f n (x) ∈ R<br />
Produktregel für die Divergenz: ∇ · (fg) = (∇f) · g + f · (∇ · g)<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 55 –
10.1. Partielle Ableitung<br />
• HESSE-Matrix (Matrix <strong>de</strong>r zweiten partiellen Ableitungen): Sei D ⊂ R n eine offene Menge<br />
und f : D → R eine zweimal partiell diff’bare Funktion. Die Matrix <strong>de</strong>r zweiten partiellen<br />
Ableitungen heißt Hesse-Matrix von f im Punkt x ∈ D<br />
Man schreibt H f (x) = ∇ 2 f(x).<br />
H f (x) := ( ∂ i ∂ j f(x) ) n<br />
i,j=1 ∈ Rn×n<br />
Hier das ganze in Matrixschreibweise, nur um jeglichen Verwirrungen vorzubeugen:<br />
⎛<br />
⎞<br />
∂ 11 f(x) · · · ∂ 1n f(x)<br />
⎜<br />
⎟<br />
H f (x) := ⎝ .<br />
. ⎠ ∈ R n×n .<br />
∂ n1 f(x) · · · ∂ nn f(x)<br />
10.1.3 Totale Differenzierbarkeit<br />
• totale Differenzierbarkeit: Sei D ⊂ R n eine offene Menge. Eine Abbildung f : D → R m<br />
heißt in einem Punkt x ∈ D total differenzierbar (o<strong>de</strong>r einfach differenzierbar), wenn es eine<br />
lineare Abbildung Df(x) : R n → R m×n (das sog. Differential von f) gibt, so dass in einer<br />
Umgebung von x gilt:<br />
f(x + h) = f(x) + Df(x) · h + ω(h), h ∈ R n , x + h ∈ D,<br />
mit einer Funktion ω : D → R m <strong>de</strong>r Art<br />
‖ω(h)‖<br />
lim<br />
x+h∈D,‖h‖→0 ‖h‖<br />
Diese Beziehung schreib man auch abgekürzt in <strong>de</strong>r Form ω(h) = o(‖h‖). Das Differential<br />
von f ist gera<strong>de</strong> die Funktionalmatrix von f:<br />
Df(x) = J f (x).<br />
= 0.<br />
• Differenzierbarkeit: Sei D ⊂ R n offen. Für Funktionen f : D → R m gilt:<br />
1. Ist f in x ∈ D diff’bar, so ist es auch partiell diff’bar.<br />
2. Ist f stetig partiell diff’bar in einer Umgebung von x ∈ D, so ist es dort auch diff’bar.<br />
• Richtungsableitung: Sei D ⊂ R n offen und f : D → R im Punkt x ∈ D diff’bar. Dann<br />
existiert für je<strong>de</strong>n Vektor v ∈ R n mit ‖v‖ 2<br />
= 1 die ABleitung in Richtung v (Sog. Richtungsableitung):<br />
∂f<br />
∂v (x) = ∂ f(x + tv) − f(x)<br />
vf(x) = (∇f(x)) · v := lim<br />
.<br />
t→0 t<br />
Da ∇f(x) in die Richtung <strong>de</strong>r größten Steigung von f zeigt, ist die Richtungsableitung parallel<br />
zu ∇f(x) maximal.<br />
• Kettenregel: Seien D f ⊂ R n und D g ⊂ R m offene Mengen und g : D g → R r und f : D f →<br />
R m Abbildungen. Ist g im Punkt x ∈ D g und die Abbildung f im Punkt g(x) diff’bar, so ist die<br />
Komposition h := f ◦ g im Punkt x diff’bar und es gilt:<br />
Dh(x) = Df(g(x)) · Dg(x).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 56 –
10.1. Partielle Ableitung<br />
Dabei ist Dh(x) ∈ R r×n , Df(y) ∈ R m×n , Dg(x) ∈ R r×m und <strong>de</strong>r Punkt ’·’steht für die<br />
entsprechen<strong>de</strong> Matrix-Multiplikation.<br />
Komponentenweise be<strong>de</strong>utet obige Formel (y = g(x), i = 1, ..., n, j = 1, ..., r):<br />
∂h j<br />
∂x i<br />
(x 1 , ..., x n ) =<br />
m∑<br />
k=1<br />
∂f j<br />
∂ ( g k (x) )( g 1 (x), ..., g m (x) ) · ∂g k<br />
∂x i<br />
(x 1 , ..., x n ).<br />
Im wesentlichen wird also über alle partiellen Ableitungen einer Komponente von h(x) nach<br />
allen Komponenten von x summiert und jeweils die Kettenregel für partielle ABleitungen angewandt.<br />
• Beziehung zwischen <strong>de</strong>n Differenzierbarkeiten: Es gelten folgen<strong>de</strong> Implikationen. Die Umkehrung<br />
ist im allgemeinen falsch:<br />
stetig partiell diff’bar ⇒ (total) diff’bar ⇒ partiell diff’bar<br />
Beispiel: Es gibt Funktionen, <strong>de</strong>ren partielle Ableitungen existieren, die aber nicht total diff’bar<br />
sind.<br />
{<br />
xy<br />
∀(x, y) ≠ (0, 0)<br />
x<br />
f(x, y) =<br />
2 +y 2<br />
0 (x, y) = (0, 0)<br />
Es gilt:<br />
∂f<br />
∂x = y3 − x 2 y<br />
(x 2 + y 2 ) , fracpdfy = x3 − xy 2<br />
2 (x 2 + y 2 ) 2<br />
Aber die Funktion ist in (0, 0) nicht stetig und also erst recht nicht diff’bar: Dies zeigt man etwa<br />
mit <strong>de</strong>r Folge (a n ) ⊂ R 2 , mit a n = ( 1<br />
, 1 n n)<br />
→ (0, 0) (n → ∞):<br />
( 1<br />
f<br />
n n) , 1 = 1/n2<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
-0.4<br />
-0.6<br />
5<br />
10<br />
0.6<br />
0.4<br />
0<br />
0.2<br />
-10<br />
-5<br />
0<br />
5<br />
2/n 2 = 1 2 ≠ 0 (n → ∞). -0.6<br />
10 -10 -5<br />
0<br />
-0.2<br />
-0.4<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 57 –
10.1. Partielle Ableitung<br />
10.1.4 Mittelwertsätze<br />
• Mittelwertsatz: Sei D ⊂ R n offen und f : D → R stetig diff’bar mit Gradient ∇f(x). Ferner<br />
sei x ∈ D und h ∈ R n so, dass x + sh ∈ D für 0 ≤ s ≤ 1. Dann gilt:<br />
(∫ 1<br />
)<br />
f(x + h) − f(x) = ∇f(x + sh) ds ·h ∈ R.<br />
0<br />
} {{ }<br />
∈R n<br />
Ist f : D ⊂ R n → R m stetig diff’bar mit Jacobi-Matrix J f (x), so gilt:<br />
(∫ 1<br />
)<br />
f(x + h) − f(x) = J f (x + sh) ds ·h ∈ R m .<br />
0<br />
} {{ }<br />
∈R m×n<br />
Mit M := max<br />
0≤s≤1 ‖J j(x + sh)‖ 2<br />
gilt die folgen<strong>de</strong> Abschätzung:<br />
‖f(x + h) − f(x)‖ 2<br />
≤ M ‖h‖ 2<br />
.<br />
Dies be<strong>de</strong>utet, dass die Funktion f in D lokal Lipschitz-stetig ist.<br />
Anschaulich be<strong>de</strong>utet <strong>de</strong>r Mittelwertsatz, dass man entlang <strong>de</strong>r Verbindungslinie h zwischen<br />
x und x + h über die Ableitungen integriert (im Eindimensionalen entspricht das in etwa <strong>de</strong>m<br />
Hauptsatz <strong>de</strong>r Differential- und Integralrechnung).<br />
Die Integration über Vektoren und Matrizen ist hier komponentenweise zu verstehen.<br />
Für eine stetig diff’bare Funktion f : D → R folgt mit Hilfe <strong>de</strong>s Mittelwertsatzes <strong>de</strong>r Integralrechnung<br />
die Beziehung:<br />
f(x + h) − f(x) =<br />
∫ 1<br />
0<br />
(<br />
∇f(x + sh)<br />
)<br />
· h ds =<br />
(<br />
∇f(x + τh)<br />
)<br />
· h<br />
Mit einem τ ∈ (0, 1) als Zwischenwert. Die mehrdimensionale Mittelwertaussage hat keine<br />
entsprechen<strong>de</strong> differentielle Formulierung!<br />
Das ganze kann man sich vorstellen, wie <strong>de</strong>n eindimensionalen Mittelwertsatz entlang einer<br />
Verbindungsstrecke h ≡ b − a zwischen zwei Punkten a ≡ x und b ≡ x + h. Dabei ist dann<br />
Ξ = x + τh ein Punkt auf <strong>de</strong>r Gera<strong>de</strong>n zwischen b und a.<br />
f(b) − f(a)<br />
‖b − a‖<br />
= ∇<br />
(<br />
f(x<br />
}<br />
+<br />
{{<br />
τh<br />
}<br />
)<br />
=Ξ<br />
)<br />
·<br />
b − a<br />
.<br />
‖b − a‖<br />
} {{ }<br />
=e b−a<br />
Dabei ist e b−a <strong>de</strong>r Einheitsvektor in Richtung b − a, mit ‖e b−a ‖ = 1. Der eindimensionale<br />
Mittelwertsatz besagt, dass es auf [a, b] ⊂ R ein ξ gibt, so dass gilt:<br />
f(b) − f(a)<br />
b − a<br />
= f ′ (ξ).<br />
• Verträglichkeit von Normenbildung und Integration: Sei f : [a, b] ⊂ R → R m eine stetige,<br />
vektorwertige Funktion. Dann gilt:<br />
∥ f(s) ds<br />
∥ ≤ ‖f(s)‖ 2<br />
ds.<br />
2<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 58 –
10.2. TAYLOR-Entwicklung im R n<br />
10.2 TAYLOR-Entwicklung im R n<br />
• Multi-In<strong>de</strong>x-Notation: Für n-Tupel α = (α 1 , ..., α n ) ∈ N n 0<br />
wird gesetzt:<br />
Für x = (x 1 , ..., x n ) ∈ R n wird gesetzt:<br />
|α| := α 1 + ... + α n ; α! := α 1 ! · ... · α n !<br />
x α := x α 1<br />
1<br />
· ... · x αn<br />
n<br />
Für eine |α|-mal stetig diff’bare Funktion wird gesetzt:<br />
D α f := ∂ α 1<br />
1<br />
· ... · ∂ αn<br />
n f =<br />
∂ |α|<br />
∂x α f.<br />
1<br />
1<br />
· ... · x αn<br />
n<br />
• TAYLOR-Formel: Sei D ⊂ R n eine offene Menge und f : D → R eine (r + 1)-mal stetig<br />
diff’bare Funktion. Dann gilt für je<strong>de</strong>n Vektor h ∈ R n mit x + sh ∈ D, s ∈ [0, 1] die<br />
Taylor-Formel:<br />
f(x + h) = ∑ D α f(x)<br />
· h α + R f<br />
α!<br />
r+1(x, h).<br />
|α|≤r<br />
Das Restglied R f r+1 (x, h) hat in differentieller und integraler Form folgen<strong>de</strong> Darstellung:<br />
R f r+1(x, h) = ∑<br />
1∫<br />
= (r + 1) ·<br />
|α|=r+1<br />
∑<br />
0 |α|=r+1<br />
D α f(x+θh)<br />
α!<br />
· h α =, θ ∈ (0, 1)<br />
D α f(x+t·h)<br />
α!<br />
· (1 − t) r dt.<br />
• Darstellung <strong>de</strong>r ersten Glie<strong>de</strong>r <strong>de</strong>r Taylor-Entwicklung: Sei D ⊂ R n eine offene Menge<br />
und f : D → R eine r + 1-mal stetig diff’bare Funktion. Dann gilt für alle x ∈ D und<br />
f(x + h) = ∑<br />
|α|≤r<br />
∂ α f(x)<br />
h α + ω r (h),<br />
α!<br />
mit Funktionen ω r mit <strong>de</strong>n Eigenschaften ω r (0) = 0 und<br />
lim<br />
h→0,h≠0<br />
ω r (h)<br />
‖h‖ r .<br />
2<br />
Speziel im Fall r = 1 gilt mit <strong>de</strong>m Gradienten ∇f von f:<br />
f(x + h) = f(x) + ( ∇f(x), h ) 2 + ω 1(h),<br />
und im Fall r = 2 gilt mit <strong>de</strong>r Hesse-Matrix H f von f:<br />
f(x + h) = f(x) + ( ∇f(x), h ) 2 + 1 2(<br />
Hf (x)ḣ, h ) 2 + ω 2(h).<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 59 –
10.3. Satz über implizite Funktionen<br />
• TAYLOR-Reihe: Für eine beliebig oft partiell diff’bare Funktion f : D ⊂ R n → R und einem<br />
Punkt x ∈ D heißt die Reihe<br />
∞∑<br />
T∞(x f D α f(x)<br />
+ h) =<br />
h α<br />
α!<br />
|α|=0<br />
die Taylor-Reihe von f in x. Die FUnktion f heißt reell analytisch in x, wenn die Taylor-Reihe<br />
von f in einer Umgebung von x konvergiert mit<br />
T f ∞(x) = f(x).<br />
• hinreichen<strong>de</strong> Konvergenzbedingung für TAYLOR-Reihen: Sei D ⊂ R n eine offene Menge<br />
und f : D → R eine beliebig oft diff’bare Funktion. Dann ist f in D reell analytisch, wenn gilt:<br />
R f r+1(x, h) → 0 (r → ∞), x ∈ D.<br />
Eine hinreichen<strong>de</strong> Bedingung dafür ist, dass die partiellen Ableitungen von f gleichmäßig beschränkt<br />
sind:<br />
(<br />
M(f) := sup sup |D α f(x)| ) < ∞.<br />
|α|≥0 x∈D<br />
• Darstellung <strong>de</strong>r TAYLOR-Reihe durch Polynome: Wird eine beliebig oft stetig diff’bare<br />
Funktion f : D ⊂ R n → R in einer Umgebung K r (x) ⊂ D durch eine Reihe homogener<br />
Polynome P α = ∑ x α auf R n mit <strong>de</strong>m Grad k = |α| dargestellt, so ist dies die Taylor-Reihe<br />
von f in x:<br />
|α|=k<br />
f(x + h) =<br />
∞∑<br />
P α (h),<br />
|α|=0<br />
x + h ∈ K r (x).<br />
1<br />
1<br />
Beispiel: Man betrachte die Funktion f(x 1 , x 2 ) =<br />
1−x 1 −x 2<br />
=<br />
1−(x 1 +x 2<br />
. Hier kann man einen<br />
)<br />
Trick benutzen, in<strong>de</strong>m man in neue Koordinaten z := x 1 + x 2 transformiert. So lässt sich die<br />
Bildung <strong>de</strong>r Taylor-Reihe auf einen eindimensionalen Fall zurückführen:<br />
1<br />
1 − x 1 − x 2 } {{ }<br />
=f(x 1 ,x 2 )<br />
=<br />
1<br />
1 − (x 1 + x 2 ) = 1 =<br />
}<br />
1<br />
{{<br />
− z<br />
}<br />
=f(z)<br />
10.3 Satz über implizite Funktionen<br />
Im folgen<strong>de</strong>n wird untersucht, inwiweit durch eine Gleichung<br />
∞∑<br />
z k =<br />
k=0<br />
∞∑<br />
(x 1 + x 2 ) k<br />
k=0<br />
F(x, y) = 0,<br />
x ∈ D x , y ∈ D y<br />
eine Funktion f(x) : D x → D y <strong>de</strong>finiert wird, so dass gilt:<br />
F ( x, f(x) ) = 0, ∀x ∈ D x .<br />
Es stellt sich die Frage, ob diese implizite Funktion f ein<strong>de</strong>utig <strong>de</strong>finiert ist. Beson<strong>de</strong>rs wichtig ist <strong>de</strong>r<br />
Spezialfall:<br />
F(x) = x − g(y) = 0.<br />
Wird hierdurch ein<strong>de</strong>utig eine Funktion y = f(x) <strong>de</strong>finiert, so gilt: y = f(x) = g −1 (x), man fin<strong>de</strong>t<br />
also die Umkehrfunktion von g.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 60 –
10.3. Satz über implizite Funktionen<br />
Satz über implizite Funktion: Seien D x ⊂ R n und D y ⊂ R m offene Mengen und F : D x × D y →<br />
R m eine stetige diff’bare Abbildung. Ferner sei (^x, ^y) ∈ D x × D y ein Punkt, mit:<br />
und regulärer Jacobi-Matrix D y F(^x, ^y) ∈ R m×m .<br />
F(^x, ^y) = 0<br />
1. Dann gibt es Umgebungen U(^x) × U(^y) ⊂ D x × D y und eine stetige Funktion f : U(^x) →<br />
U(^y), so dass<br />
F(x, f(x)) = 0, x ∈ U(^x).<br />
2. Die Funktion f ist ein<strong>de</strong>utig bestimmt, d.h.: Ist (x, y) ∈ U(^x)×U(^y) ein Punkt mit F(x, y) = 0,<br />
so ist y = f(x).<br />
3. Die Funktion f ist im Punkt ^x diff’bar und ihre Jacobi-Matrix J f (^x) ∈ R m×n ist gegeben durch:<br />
J f (^x) = − ( D y F(^x, ^y) ) −1<br />
Dx F(^x, ^y).<br />
Bemerkungen: Wichtig ist hier vor Allem die Beziehung U(^x) × U(^y) ⊂ D x × D y , die besagt,<br />
dass die Umgebungen kleiner sind, als die Definitionsbereiche. Dies ermöglicht es auch dann eineutige<br />
implizite Funktionen f zu fin<strong>de</strong>n, wenn dies auf <strong>de</strong>m ganzen Definitionsbereich eigentlich nicht<br />
möglich wäre. Als Beispiel betrachte man<br />
F(x, y) = x 2 + y 2 − 1 = 0.<br />
Diese Gleichung beschreibt alle Punkte auf <strong>de</strong>m Einheitskreis. Durch formales Auflösen nach y erhält<br />
man:<br />
f(x) = y = ± √ 1 − x 2 .<br />
Hier ist f also nicht ein<strong>de</strong>utig <strong>de</strong>finiert. Betrachtet man aber nur kleine Umgebungen <strong>de</strong>s Punkte (0, 1)<br />
o<strong>de</strong>r überhaupt irgen<strong>de</strong>ine Umgebung eines Punkte (^x, ^y) mit ^x 2 + ^y 2 = 1 und ^y > 0, so ist dort f<br />
als positiver Zweig ein<strong>de</strong>utig <strong>de</strong>finiert.<br />
Kleine schmutzige Merkregeln: Die Regularität <strong>de</strong>r D y F(^x, ^y) ∈ R m×m impliziert <strong>de</strong>ren Invertierbarkeit<br />
und ist <strong>de</strong>swegen nötig, um das Ergebnis J f (^x) = −D y F(^x, ^y) −1 D x F(^x, ^y) zu ermöglichen.<br />
Man kann sich das ganze etwas besser merken, wenn man sich folgen<strong>de</strong> typographische Beziehung<br />
einprägt:<br />
J f (x) = dy<br />
dx = dF/dx<br />
dF/dy = D xf<br />
D y f<br />
Beispiel:<br />
Man betrachte die Funktion<br />
F(x, y) = x 2 + y 2 − 1.<br />
Sie stellt <strong>de</strong>n Einheitskreis im R 2 dar. Es bleibt zu klären, wo sie implizit eine Funktion f(x) mit<br />
F(x, f(x)) erklärt. Formal erhält man:<br />
f(x) = ± √ 1 − x 2 .<br />
Die Ableitung nach y ist: D y F(x, y) = 2y. Dies Jacobi-’Matrix’ muss regulär sein, also vollen Rang<br />
haben. Bei Zahlen be<strong>de</strong>utet das, dass D y F(x, y) ≠ 0, was für alle y ≠ 0 gegeben ist. Also existiert zu<br />
je<strong>de</strong>m Punkt auf <strong>de</strong>m Graphen (x, y) ∈ G(F) ⊂ R 2 , mit y ≠ 0 eine offene Umgebung um (x, y) in<br />
<strong>de</strong>r die implizierte Funktion ein<strong>de</strong>utig bestimmt ist.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 61 –
10.4. Reguläre/umkehrbare Funktionen<br />
10.4 Reguläre/umkehrbare Funktionen<br />
• Reguläre Abbildungen: Sei D ⊂ R n offen. Eine Abbildung f : D → R n heißt regulär in<br />
^x ∈ D, wenn sie in einer Umgebung K ɛ (^x) ⊂ D stetig diff’bar und die Funktionalmatrix J f (^x)<br />
regulär ist (<strong>de</strong>n vollen Rang hat). Sie heißt regulär auf D, wenn sie in je<strong>de</strong>m Punkt ^x ∈ D<br />
regulär ist.<br />
• Umkehrabbildung: Sei D ⊂ R n offen und f : D → R n regulär in ^x ∈ D Dann gibt es eine<br />
offene Umgebung U(^x) ⊂ D von ^x, die von f bijektiv auf eine offene Umgebung U(^y) ⊂ R n<br />
von ^y := f(^x) abgebil<strong>de</strong>t wird. Die Umkehrabbildung f −1 : U(^y) → U(^x) ist ebenfalls regulär<br />
in ^y und für ihre Funktionalmatrix und Funktional<strong>de</strong>terminante gilt:<br />
J f −1(^y) = J f (^x) −1 ,<br />
|J f −1(^y)| = |J f (^x)| −1<br />
Dieser Satz garantiert die lokale Umkehrbarkeit von Funktionen. Für die globale Umkehrbarkeit<br />
wür<strong>de</strong> man benötigen, dass die implizite Funktion g −1 überall ein<strong>de</strong>utig <strong>de</strong>finiert ist, was<br />
nur unter sehr eingeschränkten Bedingungen möglich ist.<br />
Eine einein<strong>de</strong>utige Abbildung f : D ⊂ R n → R n mit stetiger Umkehrabbildung heißt Homöomorphismus.<br />
Sind f und f −1 stetig diff’bar, so spricht man von einem Diffeomorphismus.<br />
Der Satz folgt aus <strong>de</strong>m Satz über implizite Funktionen, wenn man dort die folgen<strong>de</strong>n Setzungen<br />
macht:<br />
F(x, y) = x − f(y) ⇒ y = f −1 (x)<br />
Dann gilt für <strong>de</strong>i Jacobi-Matrix D y F(x, y), die ja regulär sein muss:<br />
D y F(x, y) = −D y f(y)<br />
Dieses entspricht aber schon <strong>de</strong>r Voraussetzung <strong>de</strong>s Satzes über Umkehrabbildungen. Weiter<br />
erhält man D x F(x, y) = E n und daraus:<br />
J f −1(x) = − ( D y F(x, y) ) −1<br />
· Dx F(x, y) = ( J f (x) ) −1<br />
• offene Abbildungen: Ist die Abbildung f : D ⊂ R n → R n regulär, so ist für je<strong>de</strong> offene Menge<br />
O ⊂ D auch die Bildmenge f(O) offen. Solche Abbildungen wer<strong>de</strong>n auch als offen bezeichnet.<br />
10.5 Extremwertaufgaben<br />
10.5.1 Lokale Extrema<br />
In diesem Abschnitt sucht man Bedingungen und Charakterisierungen für lokale Extrema von Funktionn<br />
f : D ⊂ R n → R.<br />
• Loales Extremum: Eine Funktion f : D ⊂ R n → R hat in einem Punkt x ∈ D ein lokales<br />
Extremum, wenn auf einer Kugelumgebung K ɛ (x) ⊂ D gilt:<br />
f(x) =<br />
sup f(y) o<strong>de</strong>r f(x) = inf f(y).<br />
y∈K ɛ(x)<br />
y∈K ɛ(x)<br />
Das Extremum ist strikt, wenn ex in K ɛ (x) nur im Punkt x angenommen wird.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 62 –
10.5. Extremwertaufgaben<br />
• notwendige Extremalbedingung: Sei D ⊂ R n offen und f : D → R stetig diff’bar. Hat f in<br />
einem Punkt x ∈ D ein lokales Extremum, so gilt:<br />
∇f(x) = 0.<br />
• hinreichen<strong>de</strong> Extremalbedingung: Sei D ⊂ R n offen und f : D → R zweimal stetig diff’bar<br />
und es sei in einem Punkt x ∈ D:<br />
∇f(x) = 0.<br />
Ist die Hesse-Marix H f (x) positiv <strong>de</strong>finit, so liegt in x ein striktes lokales Minimum, ist sie negativ<br />
<strong>de</strong>finit, so liegt in x ein striktes lokales Maximum. Ist sie in<strong>de</strong>finit, so kann in x überhaupt<br />
kein lokales Extremum vorliegen.<br />
Der Beweis nutzt die Darstellung <strong>de</strong>r Funktion f durch die Taylor-Entwicklung:<br />
f(x + h) = f(x) + ( ∇f(x), h ) + 1 Hf (x)ḣ, h<br />
2<br />
} {{ } 2( ) + ω 2 2(h).<br />
=0 (Extremalbedingung)<br />
Ist H f (x) positiv <strong>de</strong>finit, so gilt mit <strong>de</strong>m kleinesten Eigenwert λ > 0: ( H f (x)ḣ, h ) ≥ λ 2 ‖h‖2 ,<br />
h ∈ R n . Weiter wird für ein hinreichen<strong>de</strong>s ‖h‖ 2<br />
< δ nach Vorraussetzung: ‖ω 2 (h)‖ 2<br />
<<br />
1<br />
λ 2 ‖h‖2 2<br />
. Daraus erhält man dann mit obiger Beziehung:<br />
f(x + h) − f(x) = 1 2(<br />
Hf (x)ḣ, h ) 2 + ω 2(h) ><br />
10.5.2 Extremwertaufgaben mit Nebenbedingungen<br />
>0<br />
{ }} {<br />
1<br />
2 λ ‖h‖2 − ‖ω 2 (h)‖ } {{ } 2<br />
< 1 2 λ‖h‖2 2<br />
In diesem Abschnitt sucht man Lösungen von Optimierungsaufgaben mit Nebenbedingungen. Seien<br />
F : D → R und g : D → R diff’bare Funktionen auf einer offenen Menge D ⊂ R n . Man sucht dann<br />
einen Punkt ^x ∈ D mit:<br />
F(^x) = inf {F(x), x ∈ K r (^x), g(^x) = 0} .<br />
Die Funktion g beschreibt also die Nebenbedingung, unter <strong>de</strong>r ein ^x gesucht wird, für das F(^x) minimal<br />
ist.<br />
• LAGRANGE-Multiplikatoren: Sei D ⊂ R n offen und seien F, g : D → R zwei stetig diff’bare<br />
Abbildungen. Ferner sei ^x ∈ D ein Punkt, in <strong>de</strong>m F ein lokales Extremum unter <strong>de</strong>r Nebenbedingung<br />
g(^x) = 0 besitzt, d.h. mit <strong>de</strong>r Menge M := {x ∈ D | g(x) = 0} gilt auf einer Umgebung<br />
U = K r (^x) ⊂ D:<br />
F(^x) = inf F(x).<br />
x∈U∩M<br />
Ist dann ∇g(^x) ≠ 0, so gibt es einen sog. Lagrange-Multiplikator ^λ ∈ R, so dass:<br />
∇F(^x) = ^λ · ∇g(^x).<br />
Man kann die Aussage dieses Satzes auch so interpretieren, dass je<strong>de</strong>r lokale Minimalpunkt ^x<br />
<strong>de</strong>r FUnktion F unter <strong>de</strong>r Nebenbedingung g(^x) = 0 notwendig einen sog. stationären Punkt<br />
<strong>de</strong>r Lagrange Funktion L(x, λ) darstellt:<br />
L(x, λ) := F(x) − λg(x), (x, λ) ∈ D × R.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 63 –
10.5. Extremwertaufgaben<br />
Das be<strong>de</strong>utet, dass für einen solchen Punkt (^x, ^λ) gilt:<br />
∇L(^x, ^λ) = ∇F(^x) − ^λ∇g(^x) = 0 ⇔ ∇F(^x) = ^λ∇g(^x)<br />
Beispiel: Man bestimme das Maximum <strong>de</strong>r Funktion<br />
F(x) := (x 1 · ... · x n ) 2<br />
auf <strong>de</strong>r Spähre S 1 = { x ∈ R n∣ ∣ ‖x‖2 = 1 } . Damit erhält man die Nebenbedingung:<br />
g(x) :=<br />
n∑<br />
x 2 i − 1 = 0.<br />
i=1<br />
Da F und g offensichtlich aus Polynomen bestehen, sind sie stetig diff’bar. Ein Minimum und<br />
Maximum wird angenommen, weil die Spähre S 1 kompakt ist.<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
0<br />
-1<br />
-0.8 -0.6 -0.4 -0.2 0<br />
0.2 0.4 0.6 0.8 1 -1<br />
-0.8-0.6-0.4-0.20<br />
0.20.40.60.81<br />
Für <strong>de</strong>n Gradienten von g gilt: ∇g(x) = 2x ≠ 0, x ∈ S 1 . Damit gelten die Vorraussetzungen<br />
<strong>de</strong>s Satzes über Lagrange-Multiplikatoren auf <strong>de</strong>r ganzen Sphäre S 1 , also in allen Potenziellen<br />
Extremalpunkten ^x ∈ S 1 . D.h. man fin<strong>de</strong>t die Punkte ^x als Lösungen <strong>de</strong>s Gleichungssystems:<br />
∇F(^x) = ^λ∇g(^x) ⇔ ∂ i F(^x) = ^λ∂ i g(^x), i = 1, ..., n, ^x ∈ R n , ^λ ∈ R<br />
Diese Gleichungssystem hat für dieses spezielle Problem die Gestalt:<br />
2(^x 1 · ... · ^x n ) 2<br />
Diese Gleichung besagt, dass:<br />
^x 2 1 = ... = ^x 2 n = 1^λ (^x 1·...·^x n ) 2<br />
^x i<br />
= 2^λ^x i bzw. (^x 1 · ... · ^x n ) 2 = ^λ^x 2 i , i = 1, ..., n.<br />
und<br />
n∑<br />
k=1<br />
^x 2 k<br />
} {{ }<br />
=1 (Nebenbed.)<br />
= n^λ (^x 1·...·^x n ) 2 = 1 ⇒ 1^λ (^x 1·...·^x n ) 2 = 1 n .<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 64 –
10.5. Extremwertaufgaben<br />
Damit erhält man durch Einsetzen <strong>de</strong>r rechten in die linke Gleichung:<br />
^x 2 1 = ... = ^x 2 n = 1 n<br />
√<br />
1<br />
⇒ ^x i = ±<br />
n<br />
mit: F(^x) = ±<br />
1<br />
n n .<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 65 –
KAPITEL 11<br />
Kurven- Flächen- und Volumenintegrale<br />
11.1 Inhaltsmessung von Mengen <strong>de</strong>s R n<br />
11.1.1 Grundlagen<br />
Im folgen<strong>de</strong>n soll ein Maß für <strong>de</strong>n Inhalt |M| von Mengen M ⊂ R n <strong>de</strong>finiert wer<strong>de</strong>n. Dieser Inhalt<br />
sollte folgen<strong>de</strong> Eigenschaften aufweisen:<br />
1. Positivität: |M| ≥ 0.<br />
2. Bewegungsinvarianz: |M| = |M ′ |, wenn M und M ′ isometrisch (kongruent) sind, d.h. durch<br />
eine abstandserhalten<strong>de</strong> Transformation wie Verschiebung, Drehung und Spiegelung <strong>de</strong>s R n<br />
ineinan<strong>de</strong>r überführt wer<strong>de</strong>n können.<br />
3. Normierung: Der Einheitswürfel W 1 = [0, 1] n hat <strong>de</strong>n Inhalt |W 1 | = 1.<br />
4. Additivität: M ∩ N = ∅ ⇒ |M ∪ N| = |M| + |N|.<br />
Es ist zu beachten, dass man zwar im R und R 2 je<strong>de</strong>r Menge einen Inhalt mit obigen Eigenschaften<br />
zuordnen kann, die aber schon im R 3 nicht mehr unbedingt möglich ist.<br />
• Intervallsummen: Für Intervallsummen S ∈ S mit einer nichtüberlappen<strong>de</strong>n Darstellung S =<br />
m⋃<br />
I k ist <strong>de</strong>r Inhalt erklärt durch:<br />
k=1<br />
|S| :=<br />
m∑<br />
|I k | .<br />
k=1<br />
Diese Definition hat offensichtlich folgen<strong>de</strong> Eigenschaften:<br />
– S ⊂ S ′ ⇒ |S| ≤ |S ′ |<br />
– |S ∪ S ′ | ≤ |S| + |S ′ |<br />
– S ∩ S ′ = ∅ ⇒ |S ∪ S ′ | = |S| + |S ′ |<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 66 –
11.1. Inhaltsmessung von Mengen <strong>de</strong>s R n<br />
11.1.2 JORDAN-Inhalt<br />
• JORDAN-Inhalt: Für beschränkte (nicht-leere) Mengen M ⊂ R n sind <strong>de</strong>r innere Inhalt |M| i<br />
und <strong>de</strong>r äußere Inhalt |M| a<br />
<strong>de</strong>finiert durch:<br />
|M| i<br />
:=<br />
sup |S| ≤ inf |S| =: |M| a .<br />
S∈S,S⊂M<br />
S∈S,M⊂S<br />
Für die leere Menge setzt man |∅| i<br />
= |∅| a<br />
:= 0.<br />
Eine Menge heißt quadrierbar/meßbar im Jordan’schen Sinne mit <strong>de</strong>m sog. Jordan-Inhalt |M|,<br />
wenn gilt:<br />
|M| i<br />
= |M| a<br />
=: |M|<br />
• JORDAN-Nullmengen: Mengen M ⊂ R n mit (äußerem) Inhalt |M| a<br />
= 0 wer<strong>de</strong>n Jordan-<br />
Nullmengen genannt. Man sagt, dass eine Aussage fast überall gilt, wenn sie in allen Punkten,<br />
bis auf diejenigen aus einer Nullmenge gilt.<br />
Für Jordan-Nullmengen gilt:<br />
1. Je<strong>de</strong> Teilmenge einer Nullmenge ist ebenfalls Nullmenge.<br />
2. Je<strong>de</strong> endliche Vereinigung von Nullmengen ist wie<strong>de</strong>r Nullmenge; insbeson<strong>de</strong>re endliche<br />
Mengen M = { x i<br />
∣ ∣ i ∈ N } ⊂ R n .<br />
3. Je<strong>de</strong> in einem echten Untervektorraum von R n enthaltene beschränkte Menge M ⊂ R n<br />
ist Nullmenge.<br />
Beispiel: 2-dimensionale Flächen haben zwar ein 2-dimensionales Volumen (Flächeninhalt),<br />
aber kein 3-dimensionales.<br />
4. Ist M ⊂ R n kompakt und f : M → R eine stetige Funktion, so ist ihr Graph<br />
G(f) := {( x, f(x) ) ∈ R n+1∣ ∣ x ∈ M<br />
}<br />
eine (n + 1)-dimensionale Nullmenge.<br />
Endliche Mengen sind Jordan-Nullmengen. Abzählbar unendliche Mengen sind das nicht unbedingt.<br />
Ein Beispiel für eine abzählbar unendliche Menge, die Jordan-Nullmenge ist, ist die zu einer<br />
konvergenten Folge (x n ) n∈N → x gehören<strong>de</strong> Menge M := {x n : n ∈ N}. Je<strong>de</strong> Umgebung von<br />
x enthält zwar unendlich viele Punkte x n ∈ M, aber es gibt (aufgrund <strong>de</strong>r Trennungseigenschaft<br />
<strong>de</strong>s R) Umgebungen um die x n , die keine weiteren x k ≠ x n enthalten. (???)<br />
Da bei <strong>de</strong>r Definition <strong>de</strong>s Jordan-Inhaltes nur endliche Verenigungen von Intervallen zugelassen<br />
sind, hat z.B. die abzählbare Menge X = Q n ∩ [0, L] n ⊂ R n <strong>de</strong>n äußeren Inhalt |X| a<br />
= L n .<br />
Wür<strong>de</strong>n auch unendliche Intervallsummen zugelassen, so erhielte man etwa für je<strong>de</strong> abzählbare<br />
Menge A := {x i : i ∈ N}:<br />
Je<strong>de</strong>r Punkt x k ∈ M liegt für je<strong>de</strong>s ɛ > 0 in einem Würfel I k mit |I k | = ɛ2 −nk . Mit unendlichen<br />
Vereinigungen gilt also (geometrische Reihe):<br />
|A| a<br />
≤<br />
∞∑<br />
|I k | =<br />
k=1<br />
∞∑<br />
ɛ2 −nk =<br />
k=1<br />
ɛ<br />
1 − 2 −n .<br />
Damit wäre also auch die oben <strong>de</strong>finierte Menge X Nullmenge, da sie ja abzählbar ist.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 67 –
11.1. Inhaltsmessung von Mengen <strong>de</strong>s R n<br />
• Quadrierbarkeit I: Eine beschränkte Menge M ⊂ R n ist also genau dann quadrierbar, wenn<br />
es zu je<strong>de</strong>m ɛ > 0 Intervallsummen S ɛ , S ɛ ∈ S gibt, mit:<br />
S ɛ ⊂ M ⊂ S ɛ , |S ɛ | − |S ɛ | < ɛ.<br />
• Quadrierbarkeit II: Eine beschränkte Menge M ⊂ R n ist genau dann quadrierbar, wenn ihr<br />
Rand ∂M Nullmenge ist.<br />
Zum Beweis zeige man, dass |M| i<br />
+ |∂M| a<br />
= |M| a<br />
. Also gilt |M| i<br />
= |M| a<br />
nur im Fall<br />
|∂M| a<br />
= 0.<br />
• Lemma über <strong>de</strong>n JORDAN-Inhalt beschränkter Mengen: Für beschränkte Mengen M, N ⊂<br />
R n gilt:<br />
1. M ⊂ N ⇒ |M| a<br />
≤ |N| a<br />
, |M| i<br />
≤ |N| i<br />
.<br />
2. |M| a<br />
= ∣ ∣M ∣ ∣<br />
a<br />
, |M| i<br />
= |M ◦ | i<br />
.<br />
3. |M ∪ N| a<br />
≤ |M| a<br />
+ |N| a<br />
.<br />
4. M ◦ ∩ N ◦ = ∅ ⇒ |M ∪ N| i<br />
≥ |M| i<br />
+ |N| i<br />
.<br />
5. lim<br />
ɛ→0<br />
|U ɛ (M)| a<br />
= |M| a<br />
.<br />
Die ɛ-Umgebungen von M approximieren also <strong>de</strong>n äußeren Inhalt <strong>de</strong>r Menge.<br />
Beispiel für eine nicht-quadrierbare Menge:<br />
M := { x ∈ [0, 1] 2 ⊂ R 2∣ ∣ xi ∈ Q, i = 1, 2 }<br />
Dies ist die Menge aller im Einheitsquadrat <strong>de</strong>s R 2 enthaltenen Punkte, <strong>de</strong>ren Komponenten in<br />
Q liegen. Man beachte, dass Q dicht in R liegt. Damit erhält man:<br />
|M| a<br />
= ∣ ∣ M<br />
∣<br />
∣a = ∣ ∣ [0, 1]<br />
2 ∣ ∣ = 1, |M|i = |M ◦ | i<br />
= |∅| i<br />
= 0 ⇒ M ist nicht quadrierbar.<br />
• Für <strong>de</strong>n Jordan-Inhalt gilt:<br />
1. Ist M quadrierbar, so gilt |M| = |M ◦ | = ∣ ∣ M<br />
∣ ∣. Insbeson<strong>de</strong>re ist auch je<strong>de</strong>s beschränkte<br />
offene, o<strong>de</strong>r halboffene Intervall quadrierbar.<br />
Beweis-I<strong>de</strong>e: Es gilt ∂M = ∂M ◦ = ∂M. Damit sind M ◦ und M quadrierbar. Daraus<br />
leitet man dann leicht die z.z. Beziehung her.<br />
2. Für quadrierbare Mengen M, N ⊂ R n sind auch Vereinigung M sup N, Schnitt M ∩ N<br />
und Differenz M\N quadrierbar.<br />
Beweis-I<strong>de</strong>e: Sei A eine <strong>de</strong>r genannten Mengen. Dann gilt: ∂A ⊂ ∂M ∪ ∂N, da |∂M| =<br />
|∂N| = 0 ist also auch |∂A| = 0 und A damit quadrierbar.<br />
• Eigenschaften <strong>de</strong>s JORDAN-Inhaltes: Für quadrierbare Mengen M, N ⊂ R n gilt:<br />
1. Monotonie: M ⊂ N ⇒ |M| ≤ |N|.<br />
2. Subadditivität: |M sup N| ≤ |M| + |N|.<br />
3. Additivität: M ◦ ∩ N ◦ = ∅ ⇒ |M ∪ N| = |M| + |N|.<br />
4. M ⊂ N ⇒ |N\M| = |N| − |M|.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 68 –
11.1. Inhaltsmessung von Mengen <strong>de</strong>s R n<br />
11.1.3 Würfelsummen<br />
Für manche Beweise und zur Anschauung ist es manchmal einfacher statt <strong>de</strong>n Allgemeinen Intervallsummen<br />
sog. Würfelsummen aus lauter gleichen Intervallwürfeln zu verwen<strong>de</strong>n. Diese wer<strong>de</strong> in<br />
diesem Abschnitt <strong>de</strong>finiert und ihre Beziehung zum Jordan-Inhalt erläutert.<br />
• Würfel: Die Würfel im R n mit <strong>de</strong>n Eckpunkten 2 −k · p, p ∈ Z n , <strong>de</strong>r Kantenlänge 2 −k und <strong>de</strong>m<br />
Inhalt 2 −nk bil<strong>de</strong>n die Men<strong>de</strong> W k <strong>de</strong>r Würfel k-ter Stufe.<br />
Die Würfel 0-ter Stufe sind gera<strong>de</strong> die Einheitswürfel. Ihre Kantenlänge ist 2 −0 = 1. Ihre<br />
Eckpunkte liegen auf <strong>de</strong>m ’Gitter’ <strong>de</strong>r Punkte mit Komponenten aus <strong>de</strong>n ganzen (positiven<br />
und negativen) Zahlen in R n . Diese sind die Punkte p ∈ Z n . Ein Einheitswürfel erstreckt<br />
sich jeweils zwischen zwei benachbarten solcher Punkte. Nach <strong>de</strong>finition sind beliebige Würfel<br />
entwe<strong>de</strong>r gleich, o<strong>de</strong>r disjunkt, also:<br />
W 1 ∩ W 2 ≠ ∅ ⇒ W 1 = W 2 = W 1 ∩ W 2 .<br />
Zur Konstruktion <strong>de</strong>r weiteren Einheitswürfel wird jeweils die Länge <strong>de</strong>r Kanten halbiert. Beispiel:<br />
– W 0 := [0, 1] × [0, 1] ∈ W 0 über R 2 . ist <strong>de</strong>r 2-dimensionale Einheitswürfel.<br />
– W 1 := [0, 1 2 ] × [0, 1 2 ] ∈ W 1 über R 2 . Es gilt W 1 ⊂ W 0<br />
– W 2 := [0, 1 4 ] × [0, 1 4 ] ∈ W 2 über R 2 . Es gilt W 2 ⊂ W 1 ⊂ W 0<br />
– usw. ad infinitum<br />
• Würfelsummen: Die Vereinigung solcher Würfel heißt Würfelsumme. Für eine beschränkte<br />
Menge M ⊂ R n setzt man:<br />
⋃<br />
⋃<br />
M k :=<br />
W und M k :=<br />
W<br />
W∈W k ,W⊂M<br />
W∈W k ,W∩M≠∅<br />
Die Würfelsummen M k , M k sind als spezielle Intervallsummen quadrierbar. Aus dieser Definition<br />
folgt direkt:<br />
M k ⊂ M k+1 ⊂ M ⊂ M k+1 ⊂ M k , k ∈ N.<br />
Für die Inhalte gilt:<br />
|M k | ≤ |M| ≤ ∣ ∣ M<br />
k ∣ ∣ .<br />
M k enthält alle Würfel, die ganz in <strong>de</strong>r Menge liegen. Es approximiert also die Menge ’von<br />
innen’. M k enthält dagegen alle Würfel in <strong>de</strong>nen auch nur ein kleiner Teil <strong>de</strong>r Menge M liegt,<br />
approximiert die Menge also von außen.<br />
• beschränkte Mengen und Würfelsummen: Für beschränkte Mengen M ⊂ R n gilt:<br />
|M| i<br />
= lim |M k| , |M| a<br />
= lim ∣ ∣ M<br />
k .<br />
k→∞<br />
11.1.4 Abbildungen von Mengen<br />
Dieser Abschnitt behan<strong>de</strong>lt Bedingungen unter <strong>de</strong>nen die EIgenschaften offen und quadrierbar einer<br />
Menge unter Abbildungen Φ : R n → R n erhalten bleiben. Die entschei<strong>de</strong>n<strong>de</strong> Eigenschaft ist hier die<br />
Lipschitz-Stetigkeit. Einfache Stetigkeit reicht hier nicht aus.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 69 –<br />
k→∞
11.2. Das RIEMANN-Integral im R n<br />
• Sei D ⊂ R n (nicht leer) beschränkt und Φ : D → R n eine Lipschitz-stetige Abbildung mit<br />
Lipschitz-Konstante L. Dann gilt für die Bildmenge Φ(D):<br />
|Φ(D)| a<br />
≤ α |D| a<br />
, α := ( L √ n ) n<br />
.<br />
• Sei D ⊂ R n (licht leer) offen und quadrierbar. Die Abbildung Φ : D → R n sein in D L-stetig<br />
und in D regulär (d.h.: stetig diff’bar mit <strong>de</strong>t Φ ′ (x) ≠ 0).<br />
1. Die Bildmenge Φ(D) ist offen und quadrierbar und es gilt:<br />
Φ(D) = Φ(D),<br />
∂Φ(D) ⊂ Φ(∂D).<br />
2. Ist Φ in D injektiv, so gilt ∂Φ(D) = Φ(∂D). Ferner ist für je<strong>de</strong> quadrierbare Teilmenge<br />
A ⊂ D auch die Bildmenge Φ(A) quadrierbar.<br />
• Sei D ⊂ R n nicht leer und Φ : D → R n eine L-stetige Abbildung. Dann besitzt Φ eine L-<br />
stetige Fortsetzung φ : D → R n mit Φ ∣ ∣<br />
D<br />
= Φ.<br />
Damit ist <strong>de</strong>r letzte Satz auch anwendbar, wenn Φ nur auf D <strong>de</strong>finiert ist und dort L-stetig.<br />
• affin-lineare Abbildungen und Quadrierbarkeit: Es sei D ⊂ R n eine quadrierbare Menge,<br />
A ⊂ R n×n eine n × n-Matrix und b ∈ R n ein Vektor. Dann ist auch die Bildmenge Φ(D) <strong>de</strong>r<br />
wie folgt <strong>de</strong>finierten affin-linearen Abbildung quadrierbar:<br />
Φ(x) := Ax + b<br />
Es gilt:<br />
|Φ(D)| = |<strong>de</strong>t A| · |D| .<br />
Bemerkungen zum Beweis: Je<strong>de</strong> Matrix reguläre A hat eine Darstellung A = Q 1 ΛQ 2 , mit orthonormalen<br />
Matrizen Q 1 , Q 2 und einer Diagonalmatrix Λ, <strong>de</strong>ren Diagonalelemente λ 1 , ..., λ n<br />
sind. Damit gilt:<br />
|<strong>de</strong>t A| = |<strong>de</strong>t(Q 1 ΛQ 2 )| = |<strong>de</strong>t Λ| = |λ 1 · ... · λ n | .<br />
Nun sind orthonormale Abbildungen abstandserhaltend. Eine Kugel K(0) wird also wie<strong>de</strong>r auf<br />
sich selbst abgebil<strong>de</strong>t. Für <strong>de</strong>n hier betrachteten Fall erhält man also:<br />
|Φ(K)| = |Q 1 λQ 2 (K)| = |DQ 2 (K)| = |λ 1 · ... · λ n | · |Q 2 (K)| = |λ 1 · ... · λ n | · |K| = |<strong>de</strong>t A| · |K|<br />
Für <strong>de</strong>n letzten Schritt wur<strong>de</strong> benutzt, dass eine Digonalmatrix nur eine Streckung/Stauchung<br />
entlang <strong>de</strong>r Koordinatenachsen beschreibt.<br />
• Bewegungsinvarianz: Der Jordan-Inhalt ist bewegungsinvariant, d.h. je<strong>de</strong> affin-lineare Abbildung<br />
<strong>de</strong>r Form Φ(x) = Qx + b mit einer orthonormalen Matrix Q ∈ R n×n und einem<br />
Vektor b ∈ R n führt quadrierbare Mengen in quadrierbare Mengen über und läßt <strong>de</strong>n Inhalt<br />
unverän<strong>de</strong>rt.<br />
11.2 Das RIEMANN-Integral im R n<br />
Im folgen<strong>de</strong>n wird das n-dimensionale Riemann-Integral von Funtionen f : D → R eingeführt. Für<br />
<strong>de</strong>n Definitionsbereich gilt dabei: D ⊂ R n ist eine beliebige, nicht-leere und beschränkte, quadrierbare<br />
Menge. Viele <strong>de</strong>r Definitionen und Begriffe haben eine direkte Entsprechung im 1-dimensionalen<br />
Fall.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 70 –
11.2. Das RIEMANN-Integral im R n<br />
11.2.1 Definition und Grundlagen<br />
• Zerlegung: Sei D ⊂ R n eine beliebige nicht-leere und beschränkte, quadrierbare Menge. Eine<br />
endliche Zerlegung Z = {B i , i = 1, ..., m} <strong>de</strong>r Menge D in quadrierbare Teilmengen B i ⊂ M<br />
hat die Eigenschaften:<br />
m⋃<br />
D = B i , B ◦ i ∩ B ◦ j = ∅, i ≠ j.<br />
i=1<br />
Die Durchschnitte dürfen also höchstens Nullmengen sein.<br />
Die Menge aller solcher Zerlegungen von D nennt man Z(D). Die Feinheit |Z| einer Zerlegung<br />
Z = {B i } ∈ Z(D) <strong>de</strong>finiert man durch <strong>de</strong>n Durchmesser <strong>de</strong>s größten Elementes <strong>de</strong>r Zerlegung:<br />
|Z| := max<br />
B i ∈Z<br />
(<br />
diam (Bi )<br />
Eine Verfeinerung Z ′ ∈ Z(D) einer Zerlegung Z ∈ Z(D) (in Zeichen D ′ ⊂ D) ist eine<br />
Zerlegung, in <strong>de</strong>r alle B ′ j Teilmengen gewisser B i ∈ Z sind, die also vollständig in Z liegt, aber<br />
evtl. weniger ’Raum ab<strong>de</strong>ckt’.<br />
• Ober- und Untersumme: Sei f : D → R eine beschränkte Funktion mit <strong>de</strong>m wie oben <strong>de</strong>finierten<br />
Definitionsbereich D ⊂ R n . Zu einer Zerlegung Z ∈ Z(D) <strong>de</strong>finiert man die zgehörige<br />
Ober- und Untersumme:<br />
m∑ ( )<br />
m∑ ( )<br />
S Z (f) := inf f(x) · |Bi | , S Z (f) := sup f(x) · |Bi |<br />
x∈B i x∈B i<br />
i=1<br />
Für eine Zerlegung Z mit Verfeinerung Z ′ ⊂ Z gilt dann:<br />
i=1<br />
S Z (f) ≤ S Z ′(f),<br />
S Z ′(f) ≤ S Z (f)<br />
• Ober- und Unterintegral: Man <strong>de</strong>finiert dann Ober- und Unterintegral mit <strong>de</strong>n Bezeichnungen<br />
aus <strong>de</strong>n ersten zwei Punkten:<br />
∫<br />
∫<br />
J(f) = f(x)dx := sup S Z , J(f) = f(x)dx := inf S Z<br />
Z∈Z(D)<br />
D<br />
Z∈Z(D)<br />
Es folgt direkt aus dieser Definition:<br />
D<br />
J(f) ≤ J(f),<br />
J(f) = −J(−f)<br />
• RIEMANN-Integral im R n : Sei D ⊂ R n quadrierbar. Sind für eine beschränkte Funktion<br />
f : D → R ihr Ober- und Unterintegral gleich, so heißt <strong>de</strong>r gemeinsame Wert das Riemann-<br />
Integral von f über D: ∫<br />
f(x)dx := J(f) = J(f) = J(f).<br />
D<br />
Die Funktion f heißt damit Riemann-integrierbar. Die Menge <strong>de</strong>r Riemann-integrierbaren Funktionen<br />
über D wird mit R(D) bezeichnet.<br />
• RIEMANN’sches Integrabilitätskriterium: Sei D ⊂ R n quadrierbar und f : D → R eine<br />
beschränkte Funktion. f ist genau dann Riemann-integrierbar, wenn es zu je<strong>de</strong>m ɛ > 0 eine<br />
Zerlegung Z ɛ ∈ Z(D) gibt, mit:<br />
S Zɛ (f) − S Zɛ<br />
(f) < ɛ.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 71 –
11.2. Das RIEMANN-Integral im R n<br />
• RIEMANN-Summen: Sei D ⊂ R n quadrierbar und f : D → R eine beschränkte Funktion.<br />
Dann konvergiert für je<strong>de</strong> Folge von Zerlegungen Z k ∈ Z(D) mit |Z k | → 0 (k → ∞):<br />
S Zk (f) → J(f), S Zk<br />
(f) → J(f)<br />
(k → ∞).<br />
Es ist f R-integrierbar genau dann, wenn für je<strong>de</strong> Folge von Zerlegungen Z k ∈ Z(D) mit<br />
|Z k | → 0 (k → ∞) alle zugehörigen Riemann-Summen gegen <strong>de</strong>n selben Limes konvergieren.<br />
Dieser ist dann gera<strong>de</strong> das R-Integral von f über D:<br />
∫<br />
RS Zk (f) → J(f) = f(x)dx (k → ∞).<br />
• Eigenschaften <strong>de</strong>s RIEMANN-Integrals: Sei D ⊂ R n quadrierbar. Das R-Integral über D<br />
besitzt die Eigenschaften:<br />
D<br />
1. Eine R-integrierbare Funktion f ist auch auf je<strong>de</strong>r quadrierbaren Teilmenge von D R-<br />
integrierbar.<br />
2. Linearität: Für f, g ∈ R(D) und α, β ∈ R ist αf + βg ∈ R(D) und es gilt:<br />
J(αf + βg) = αJ(f) + βJ(g).<br />
3. Monotonie: Für f, g ∈ R(D) folgt aus f(x) > g(x), x ∈ D:<br />
J(f) ≥ J(g).<br />
4. Ist D = D 1 ∪ D 2 mit zwei quadrierbaren Mengen D ◦ 1 ∩ D◦ 2 = ∅, so gilt<br />
J D (f) = J D1 (f) + J D2 (f).<br />
Die Aussagen 3,4 gelten auch für Ober- und Untersummen.<br />
Ist eine Funktion f integrierbar über D mit m ≤ f(x) ≤ M, x ∈ D und ϕ : [m, M] → R<br />
eine L-stetige Funktion, so ist auch die Komposition ϕ ◦ f integrierbar. Desweiteren sind dann<br />
integrierbar:<br />
|f| , f + , f − , fg, max{f, g}, min{f, g}.<br />
Im Falle inf f(x) > 0 ist auch 1/f integrierbar.<br />
x∈D<br />
• Integrierbarkeit <strong>de</strong>r charakteristischen Funktion: Seien A ⊂ D ⊂ R n quadrierbare Mengen.<br />
Dann ist die charakteristische Funktion χ A <strong>de</strong>r Menge A über D integrierbar und es gilt:<br />
∫<br />
χ A (x)dx = |A| .<br />
D<br />
• JORDAN-NULLMENGEN und Integrierbarkeit: Auf einer Jordan-Nullmenge N ⊂ R n ist<br />
je<strong>de</strong> beschränkte Funktion f : N → R integrierbar und es gilt:<br />
∫<br />
f(x)dx = 0.<br />
N<br />
Sei D ⊂ R n quadrierbar und f : D → R beschränkt. Dann ist f entwe<strong>de</strong>r über alle drei Mengen<br />
D ◦ ⊂ D ⊂ D integrierbar, o<strong>de</strong>r über keine von diesen. Im ersteren Fall gilt:<br />
∫ ∫<br />
∫<br />
f(x)dx = f(x)dx = f(x)dx.<br />
D<br />
D ◦ D<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 72 –
11.2. Das RIEMANN-Integral im R n<br />
• RIEMANN-Integrierbarkeit stetiger Funktionen: Sei D ⊂ R n quadrierbar und f : D → R<br />
beschränkt und in D fast überall stetig, d.h. überall, bis auf eine Nullmenge N ⊂ D. Dann ist f<br />
integrierbar über D. Insbeson<strong>de</strong>re folgt aus f ∈ C(D) und sup |f(x)| < ∞ die Integrierbarkeit<br />
x∈D<br />
von f.<br />
• Dreiecksungleichung: Sei D ⊂ R n quadrierbar und f integrierbar über D. Es gilt:<br />
∫<br />
∫<br />
∣ f(x)dx<br />
∣ ≤ |f(x)| dx.<br />
11.2.2 Schranken- und Mittelwertsätze<br />
D<br />
• Schrankensatz: Sei D ⊂ R n quadrierbar. Ist f integrierbar über D und ist m ≤ f(x) ≤ M, x ∈<br />
D, so gilt:<br />
∫<br />
m · |D| ≤ f(x)dx ≤ M · |D| .<br />
Allgemeiner gilt für f, g integrierbar über D mit g ≥ 0:<br />
∫<br />
∫<br />
∫<br />
m · g(x)dx ≤ f(x)g(x)dx ≤ M ·<br />
D<br />
D<br />
D<br />
D<br />
D<br />
g(x)dx.<br />
Die erste Beziehung folgt mit <strong>de</strong>r speziellen Gewichtsfunktion g(x) = 1.<br />
• Mittelwertsatz: Sei D ⊂ R n quadrierbar und f auf D integrierbar. Dann gibt es eine Zahl<br />
µ ∈ R mit inf f(x) ≤ µ ≤ sup f(x), so dass:<br />
x∈D x∈D<br />
∫<br />
f(x)dx = µ |D| .<br />
D<br />
Ist darüberhnaus D kompakt und zusammenhängend und ist f stetig, so gibt es ein ξ ∈ D mit<br />
µ = f(ξ).<br />
11.2.3 Zusammenhang zwischen RIEMANN-Integral und JORDAN-Inhalt<br />
• Ordinatenmenge/Normalbereich: Sei D ⊂ R n quadrierbar und f : D → R eine nichtnegative<br />
Funktion. Dann ist die zugehörige Ordinatenmenge <strong>de</strong>finiert als:<br />
M(f) := { (x, t) ∈ R n+1∣ ∣x ∈ D, 0 ≤ t ≤ f(x) } .<br />
Für Funktionen f : D ⊂ R → R entspricht dies <strong>de</strong>r Fläche unter <strong>de</strong>m Funktionsgraphen.<br />
Allgemeiner <strong>de</strong>finiert man für zwei Funktionen f, g : D → R mit f ≥ g <strong>de</strong>n sog. Normalbereich:<br />
M(f, g) := { (x, t) ∈ R n+1∣ ∣x ∈ D, g(x) ≤ t ≤ f(x) } .<br />
Für Funktionen f, g : D ⊂ R → R entspricht dies <strong>de</strong>r Fläche zwischen <strong>de</strong>n Funktionsgraphen.<br />
• Sei D ⊂ R n quadrierbar und f, g : D → R beschränkt und integrierbar mit f ≥ g. Dann ist <strong>de</strong>r<br />
Normalbereich M(f, g) ⊂ R n+1 in R n+1 quadrierbar mit:<br />
∫<br />
( )<br />
|M(f, g)| = f(x) − g(x) dx.<br />
D<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 73 –
11.2. Das RIEMANN-Integral im R n<br />
Speziell gilt für f ≥ 0:<br />
∫<br />
|M(f)| =<br />
D<br />
f(x) dx.<br />
Dies impliziert auch, dass <strong>de</strong>r Graph G(f) einer integrierbaren Funktion f : D → R eine<br />
Jordan-Nullmenge in R n+1 ist.<br />
11.2.4 Vertauschung von Grenzprozessen<br />
• Sei D ⊂ R n quadrierbar und (f k ) k∈N eine Folge von über D integrierbaren Funktionen f k ,<br />
welche gleichmäßig gegen eine Funktion f : D → R konvergiert. Dann ist auch f integrierbar<br />
und es gilt: ∫ ∫<br />
∫<br />
f(x)dx = lim f k(x)dx = lim f k (x)dx.<br />
k→∞ k→∞<br />
D<br />
D<br />
• Sei D ⊂ R n quadrierbar und (f k ) k∈N eine Folge von über D integrierbaren Funktionen f k , für<br />
welche die Reihe<br />
∞∑<br />
f(x) := f k (x)<br />
auf D gleichmäßig konvergiert. Dann ist auch f integrierbar auf D und es gilt:<br />
11.2.5 Satz von FUBINI<br />
∫<br />
D<br />
∫<br />
f(x)dx =<br />
D<br />
k=1<br />
k=1<br />
∞∑<br />
f k (x)dx =<br />
∞∑<br />
∫<br />
k=1<br />
D<br />
D<br />
f k (x)dx<br />
• Satz von FUBINI: Seien I x ⊂ R n und I y ⊂ R m kompakte Intervalle mit <strong>de</strong>m kartesischen<br />
Produkt I = I x × I y ⊂ R n+m und f eine auf I integrierbare Funktion. Ferner seien für je<strong>de</strong>s<br />
feste y ∈ I y und x ∈ I x die Funktionen f(·, y) bzw. f(x, ·) integrierbar über I x bzw. I y . Dann<br />
sind auch die Funktionen<br />
∫<br />
∫<br />
F x (y) := f(x, y)dx, F y (x) := f(x, y)dy<br />
I x I y<br />
integrierbar über I y bzw. I x und es gilt:<br />
∫<br />
(∫ )<br />
f(x, y)d(x, y) = f(x, y)dx dy =<br />
I<br />
∫I y I x<br />
∫I x<br />
(∫<br />
)<br />
f(x, y)dy dx.<br />
I y<br />
Die Aussage dieses Satzes gilt natürlich auch für die Zerlegung in mehr als zwei kompakte<br />
Intervalle. Die Integrationsreihenfolge kann dann beliebig vertauscht wer<strong>de</strong>n.<br />
Zur Anwendung <strong>de</strong>s Satzes auf allgemeine Definitionsbereiche D auf <strong>de</strong>nen f stetig ist, wird D<br />
in ein Intervall I = I x × I y eingebettet und außerhalb von D durch 0 fortgesetzt:<br />
{<br />
∫<br />
f(x, y), (x, y) ∈ D<br />
^f(x, y) :=<br />
0, (x, y) ∈ I\D<br />
∫D<br />
. ⇒ f(x, y)d(x, y) = ^f(x, y)d(x, y)<br />
I x×I y<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 74 –
11.2. Das RIEMANN-Integral im R n<br />
11.2.6 Integraltransformationen<br />
• Eindimensionaler Fall: Ein Intervall I = [a, b] ⊂ R wer<strong>de</strong> durch ein Funktion ϕ auf ein<br />
Intervall ϕ(I) = [α, β] ⊂ R abgebil<strong>de</strong>t, wobei ϕ(a) = α, ϕ(b) = β gelte. Ist ϕ stetig diff’bar<br />
und monoton wachsend/fallend (d.h. ϕ ′ > 0/ϕ ′ < 0), so gilt für je<strong>de</strong> über ϕ(I) integrierbare<br />
Funktion f : ϕ(I) → R die Transformationsformel:<br />
∫ β<br />
α<br />
f(y)dy = ±<br />
∫ ϕ(b)<br />
ϕ(a)<br />
Insgesamt gilt dann also für ϕ ′ (x) ≠ 0:<br />
∫<br />
ϕ(I)<br />
f(y)dy :=<br />
∫ β<br />
α<br />
f(y)dy =<br />
f(y)dy =<br />
∫ b<br />
a<br />
∫ b<br />
a<br />
f(ϕ(x))(±ϕ ′ (x))dx.<br />
f(ϕ(x)) |ϕ ′ (x)| dx.<br />
Für affin-lineare Abbildungen ϕ(x) = ax + b gilt also: dy = |ϕ ′ (x)|dx = |a|dx.<br />
• Transformationssatz: Die Menge D ⊂ R n sei offen und quadrierbar und die Funktion Φ :<br />
D → R n stetig diff’bar, injektiv und Lipschitz-stetig. Dann ist die Menge Φ(D) quadrierbar<br />
und für je<strong>de</strong> Funktion über Φ(D) integrierbare f ist die Funktion<br />
F := f(Φ(·)) · | <strong>de</strong>t Φ ′ (·)| : D → R<br />
integrierbar. Für je<strong>de</strong> quadrierbare Teilmenge M ⊂ D gilt die Substitutionsregel<br />
∫<br />
∫<br />
f(y)dy = f ( Φ(x) ) · ∣∣ <strong>de</strong>t Φ ′ (x) ∣ · dx.<br />
Φ(M)<br />
M<br />
• Sei D ⊂ R n offen und quadrierbar und Φ : D → R n eine stetig diff’bare, Lipschitz-stetige<br />
Abbildung. Für je<strong>de</strong> quadrierbare Teilmenge M ⊂ D gilt dann:<br />
∫<br />
|Φ(M)| a<br />
≤ |<strong>de</strong>t Φ ′ (x)| dx.<br />
• Standard-Koordinatensysteme:<br />
1. ebene Polarkoordinaten: (x, y) = Φ(r, θ) := (r cos θ, r sin θ)<br />
⇒ | <strong>de</strong>t J Φ (r, θ)| =<br />
∣ cos θ r sin θ<br />
− sin θ r cos θ∣ = r<br />
⇒ d(x, y) = r dr dθ.<br />
2. Zylin<strong>de</strong>rkoordinaten: (x, y, z) = Φ(r, θ, z) := (r cos θ, r sin θ, z)<br />
⇒ d(x, y, z) = r dr dθ dz.<br />
3. Kugelkoordinaten: (x, y, z) = Φ(r, θ, ϕ) := (r cos θ sin ϕ, r sin θ sin ϕ, r cos ϕ)<br />
⇒ d(x, y, z) = r 2 sin ϕ dr dθ dϕ.<br />
M<br />
• Rotationskörper: Das Volumen |D ϕ | <strong>de</strong>s Rotationskörpers in R 3 mit <strong>de</strong>r Randkurve x =<br />
ϕ(z), z ∈ [a, b] ist bestimmt durch:<br />
∫ b<br />
|D ϕ | = π ϕ(z) 2 dz.<br />
a<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 75 –
11.3. Parameterabhängige Integrale<br />
• Kugelvolumen: Das Volumen <strong>de</strong>r Einheitskugel <strong>de</strong>s R n<br />
K (n)<br />
1 (0) = { x ∈ R n∣ ∣ ‖x‖2 < 1 }<br />
ist gegeben durch die folgen<strong>de</strong>n Formeln für gera<strong>de</strong>s n = 2m bzw. ungera<strong>de</strong>s n = 2m + 1:<br />
|K (n) πm<br />
1<br />
(0)| =<br />
m! , |K(n) 1 (0)| = 2 m+1 π m<br />
1 · 3 · 5 · ... · (2m + 1) .<br />
Die Volumen <strong>de</strong>r Kugeln scheinen mit steigen<strong>de</strong>r Dimension anzusteigen. Dies ist aber ein<br />
Trugschluss. Obige Formeln zeigen, dass |K (n)<br />
1<br />
(0) → 0 (k → ∞). Die Volumina <strong>de</strong>r Würfel<br />
[−1, 1] n ⊂ R n , mit 2 n gegen unendlich gehen. Diese Volumina entsprechen <strong>de</strong>n Volumina <strong>de</strong>r<br />
Einheitskugeln bzgl. <strong>de</strong>r Maximumsnorm!<br />
11.2.7 Uneigentliches RIEMANN-Integral<br />
• Ausschöpfen<strong>de</strong> Folgen von Mengen: Für eine Menge M ⊂ R n heißt eine monoton wachsen<strong>de</strong><br />
Folge (M k ) k∈N von quadrierbaren Teilmengen M k ⊂ M ausschöpfend, wenn für je<strong>de</strong> r-Kugel<br />
K r (0) := { x ∈ R n∣ ∣ ‖x‖2 < r } gilt:<br />
lim ∣ ( M ∩ K r (0) ) ∣<br />
\M ∣a k = 0.<br />
k→∞<br />
• uneigentliches RIEMANN-Integral: Sei D ⊂ R n eine beliebige Menge (nicht notwendig beschränkt).<br />
Eine Funktion f : D → R heißt über D uneigentlich integrierbar, wenn mit <strong>de</strong>r<br />
Notation<br />
Q f := { M ⊂ D ∣ ∣ M quadrierbar und f integrierbar über M<br />
}<br />
gilt:<br />
∫<br />
M<br />
|f(x)| dx ≤ γ, M ∈ Q f ,<br />
und wenn es eine bzgl. D ausschöpfen<strong>de</strong> Folge von Mengen D k ⊂ Q f gibt mit<br />
∫<br />
∫<br />
f(x)dx := lim f(x)dx.<br />
k→∞<br />
D k<br />
D<br />
Der Limes heißt dann das uneigentliche Riemann-Integral von f über D.<br />
• Sei D ⊂ R n eine beliebige Menge und f : D → R uneigentlich integrierbar. Dann ist für je<strong>de</strong><br />
ausschöpfen<strong>de</strong> Folge (D k ) k∈N<br />
∫<br />
∫<br />
f(x)dx = lim f(x)dx.<br />
D<br />
k→∞<br />
D k<br />
D.h. das uneigentliche Integral ist unabhängig von <strong>de</strong>r gewählten ausschöpfen<strong>de</strong>n Folge.<br />
11.3 Parameterabhängige Integrale<br />
Im folgen<strong>de</strong>n wer<strong>de</strong>n parameterabhängige Integrale <strong>de</strong>r folgen<strong>de</strong>n Form betrachtet:<br />
∫<br />
F(x) := f(x, y)dy, x ∈ D x<br />
D y<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 76 –
11.3. Parameterabhängige Integrale<br />
• Seien D x ⊂ R m , D y ⊂ R n quadrierbar und D y kompakt. Dann gilt:<br />
1. Ist f in D x × D y stetig, so ist F in D x stetig.<br />
2. Ist D x offen und sind f und ∇ x f stetig in D x × D y , so ist F in D x stetig partiell diff’bar<br />
und es gilt:<br />
∫<br />
∇F(x) = ∇ x f(x, y)dy, x ∈ D x .<br />
D y<br />
3. Ist D x offen und ist f in D x × D y k-mal stetig partiell diff’bar bzgl. x, so ist F k-mal stetig<br />
partiell diff’bar in D x .<br />
• Rotationsfreiheit von Gradientenfel<strong>de</strong>rn: Eine auf einer offenen Kugel D ⊂ R 3 stetig diff’bare<br />
Vektorfunktion v : B → R n ist genau dann Gradient einer stetig diff’baren Funktion f : B → R,<br />
d.h. v = ∇f, wenn ∇ × v = 0 gilt. D.h. es gilt:<br />
rot ( grad f(x) ) = 0 ⇔ f ist zweimal stetig diff’bar.<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 77 –
INDEX<br />
ɛ-Umgebungen<br />
einer Menge, 10<br />
eines Punktes, 10<br />
Abbildung<br />
affin lineare, 70<br />
abgeschlossene Menge, 10<br />
Abschluss einer Menge, 11<br />
Abstand, 6<br />
zu einer Menge, 7<br />
affin-lineare Abbildung, 70<br />
Aquivalenzklasse<br />
Definition, 5<br />
Satz uber, 5<br />
Aquivalenzrelation, 5<br />
ausere Inhalt, 67<br />
Ausschopfen<strong>de</strong> Folgen von Mengen, 76<br />
Banach-Raum, 12<br />
Beispiel<br />
nicht-quadrierbare Menge, 68<br />
beschrankt<br />
beschrankte Mengen, 10<br />
bewegungsinvariant, 70<br />
Bolzano-Weierstras-Charakterisierung, 12<br />
charakteristische Funktion, 5<br />
Dreiecksungleichung, 73<br />
Durchmesser einer Menge, 9<br />
Fubini, Satz von, 74<br />
Gradientenfel<strong>de</strong>r, 77<br />
Heine-Borel’sche uber<strong>de</strong>ckungseigenschaft, 12<br />
Heine-Borel, Satz von, 12<br />
hermite’sche Matritzen, 8<br />
Inhalt<br />
auserer, 67<br />
innerer, 67<br />
Inhalt, intuitiv, 66<br />
innere Inhalt, 67<br />
Integral im R n , 71<br />
Intervallschachtelung, 9<br />
Intervallschachtelungseigenschaft, 9<br />
Intervallsumme, 66<br />
Jordan-Inhalt, 67<br />
Bewegungsinvarianz, 70<br />
Differenz, 68<br />
Eigenschaften, Satze, 68<br />
Schnitt, 68<br />
Vereinigung, 68<br />
Jordan-Nullmenge, 67, 72<br />
kompakte Menge, 11<br />
Koordinaten<br />
Kugelkoordinaten, 75<br />
Polarkoordinaten, ebene, 75<br />
Zylin<strong>de</strong>rkoordinaten, 75<br />
Kronecker-Symbol, 4<br />
Kugelkoordinaten, 75<br />
Kugelumgebung, 10<br />
Kugelvolumen, 76<br />
Landau-Symbol, 4<br />
Lebesgue-Nullmenge, 12<br />
Lipschitz-stetig, 70<br />
Matrix<br />
hermite’sch, 8<br />
orthogonal, 8<br />
unitar, 8<br />
Matrixnorm, 7<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 78 –
INDEX<br />
INDEX<br />
naturliche, 7<br />
Menge<br />
abgeschlossen, 10<br />
Abschluss, 11<br />
beschrankt, 10<br />
kompakt, 11<br />
offen, 10<br />
offener Kern, 11<br />
Rand, 11<br />
relativ offen, 12<br />
zusammenhangend, 12<br />
Metrik, 6<br />
Mittelwertsatz<br />
<strong>de</strong>r Integration im R n , 73<br />
Naturliche Matrixnorm, 7<br />
Newton-Verfahren, 31<br />
Norm, 5<br />
l 1 -Norm, 6<br />
l p -Norm, 6<br />
euklidische Norm, 6<br />
Frobenius-Matrizennorm, 7<br />
Matrixnorm, 7<br />
Maximale-Spaltensummen-Norm, 7<br />
Maximale-Zeilensummen-Norm, 7<br />
Maximumsnorm, 6<br />
Spektralnorm, 7<br />
Normalbereich, 73<br />
Normaquivalenz, 5<br />
Nullmenge, 67, 72<br />
Lebesgue, 12<br />
Nullstelle<br />
Approximation nach Newton, 31<br />
Oberintegral im R n , 71<br />
Obersumme im R n , 71<br />
offene Menge, 10<br />
offener Kern, 11<br />
Ordinatenmenge, 73<br />
orthogonale Matritzen, 8<br />
Polarkoordinaten, ebene, 75<br />
positiv <strong>de</strong>finit, 9<br />
quadrierbar, 68<br />
Rand einer Menge, 11<br />
Raum<br />
Banach, 12<br />
relativ offen, 12<br />
Riemann’sches Integrabilitatskriterium, 71<br />
Riemann-Integral im R n , 71<br />
Eigenschaften, 72<br />
uneigentliches, 76<br />
Riemann-Summe, 72<br />
Rotationsfreiheit, 77<br />
Rotationskorper, 75<br />
Satz<br />
Fubini, 74<br />
Schrankensatz (R n ), 73<br />
Spektralnorm, 7<br />
stetig<br />
Lipschitz-stetig, 70<br />
Storungssatz, 9<br />
Symbole<br />
RS Zk (f), 72<br />
δ kl , 4<br />
O(·), 4<br />
o(·), 4<br />
S Z (f), S Z (f), 71<br />
∫<br />
,<br />
∫<br />
, 71<br />
Transformationssatz, 75<br />
Trennungseigenschaft, 9<br />
Uber<strong>de</strong>ckungseigenschaft, 12<br />
Umgebung<br />
Satz uber, 10<br />
uneigentliches Riemann-Integral (R n ), 76<br />
Ungleichung<br />
Bernoulli’sche Ungleichung, 6<br />
Dreiecksungleichung, 73<br />
Hol<strong>de</strong>r’sche Ungleichung, 6<br />
Minkowski’sche Ungleichung, 6<br />
Young’sche Ungleichung, 6<br />
unitare Matritzen, 8<br />
Unterintegral im R n , 71<br />
Untersumme im R n , 71<br />
Vollstandigkeit, 9<br />
Wurfel, 69<br />
Wurfelsumme, 69<br />
Zerlegung, 71<br />
zusammenhangend, 12<br />
Zylin<strong>de</strong>rkoordinaten, 75<br />
c○ 2004 by Jan Krieger (jan@<strong>jkrieger</strong>.<strong>de</strong>) – 79 –