

KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong><br />
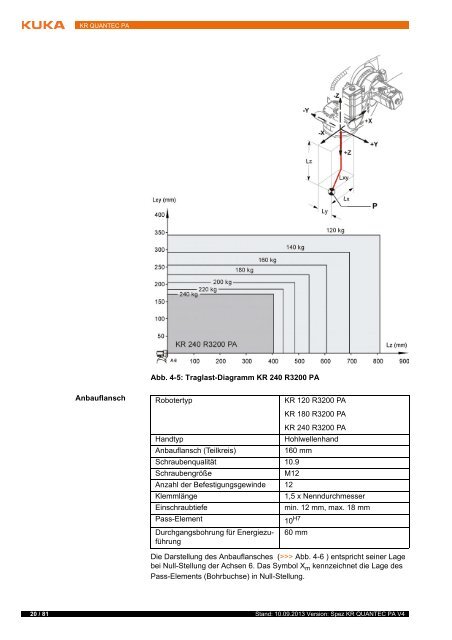
Abb. 4-5: Traglast-Diagramm <strong>KR</strong> 240 R3200 <strong>PA</strong><br />
Anbauflansch<br />
Robotertyp<br />
<strong>KR</strong> 120 R3200 <strong>PA</strong><br />
<strong>KR</strong> 180 R3200 <strong>PA</strong><br />
<strong>KR</strong> 240 R3200 <strong>PA</strong><br />
Handtyp<br />
Hohlwellenhand<br />
Anbauflansch (Teilkreis)<br />
160 mm<br />
Schraubenqualität 10.9<br />
Schraubengröße<br />
M12<br />
Anzahl der Befestigungsgewinde 12<br />
Klemmlänge<br />
1,5 x Nenndurchmesser<br />
Einschraubtiefe<br />
min. 12 mm, max. 18 mm<br />
Pass-Element<br />
10 H7<br />
Durchgangsbohrung für Energiezuführung<br />
60 mm<br />
Die Darstellung des Anbauflansches (>>> Abb. 4-6 ) entspricht seiner Lage<br />
bei Null-Stellung der Achsen 6. Das Symbol X m kennzeichnet die Lage des<br />
Pass-Elements (Bohrbuchse) in Null-Stellung.<br />
20 / 81 Stand: 10.09.2013 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong> V4














