

KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong><br />
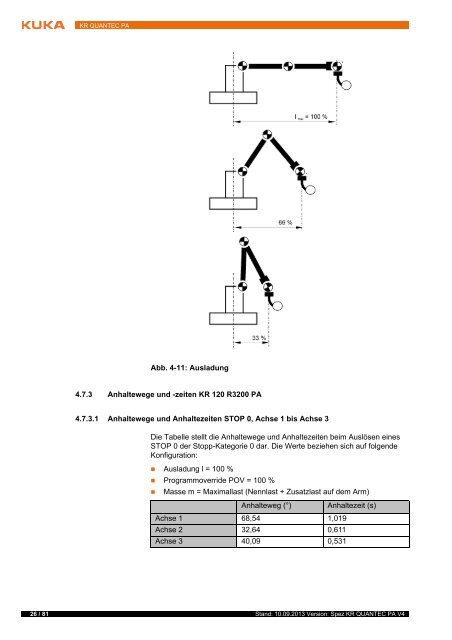
Abb. 4-11: Ausladung<br />
4.7.3 Anhaltewege und -zeiten <strong>KR</strong> 120 R3200 <strong>PA</strong><br />
4.7.3.1 Anhaltewege und Anhaltezeiten STOP 0, Achse 1 bis Achse 3<br />
Die Tabelle stellt die Anhaltewege und Anhaltezeiten beim Auslösen eines<br />
STOP 0 der Stopp-Kategorie 0 dar. Die Werte beziehen sich auf folgende<br />
Konfiguration:<br />
• Ausladung l = 100 %<br />
• Programmoverride POV = 100 %<br />
• Masse m = Maximallast (Nennlast + Zusatzlast auf dem Arm)<br />
Anhalteweg (°)<br />
Achse 1 68,54 1,019<br />
Achse 2 32,64 0,611<br />
Achse 3 40,09 0,531<br />
Anhaltezeit (s)<br />
26 / 81 Stand: 10.09.2013 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong> V4














