

Computermethoden zur Lösung einiger konkreter kombinatorischer ...
Computermethoden zur Lösung einiger konkreter kombinatorischer ...
Computermethoden zur Lösung einiger konkreter kombinatorischer ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.1 Lineare Programmierung 47<br />
und nennt P ein (konvexes) Polyeder. Existiert für alle x ∈ P ein N ∈ IR mit ||x|| ≤ N, so<br />
heißt P ein (konvexes) Polytop. Da nicht-konvexe Polyeder und Polytope im Folgenden<br />
nicht vorkommen werden, wird ”konvex”, wie bei Grünbaum weggelassen.<br />
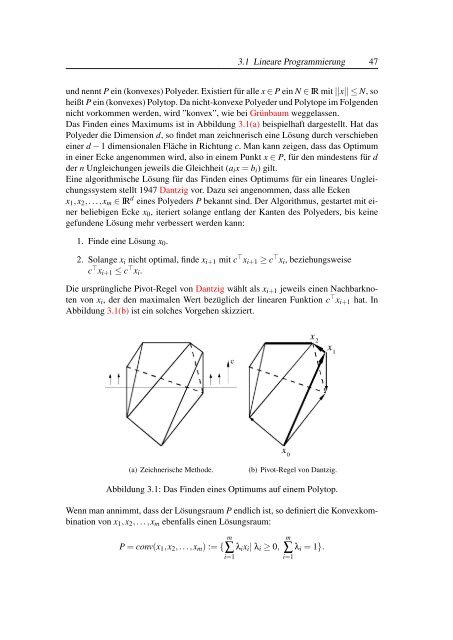
Das Finden eines Maximums ist in Abbildung 3.1(a) beispielhaft dargestellt. Hat das<br />
Polyeder die Dimension d, so findet man zeichnerisch eine <strong>Lösung</strong> durch verschieben<br />
einer d − 1 dimensionalen Fläche in Richtung c. Man kann zeigen, dass das Optimum<br />
in einer Ecke angenommen wird, also in einem Punkt x ∈ P, für den mindestens für d<br />
der n Ungleichungen jeweils die Gleichheit (aix = bi) gilt.<br />
Eine algorithmische <strong>Lösung</strong> für das Finden eines Optimums für ein lineares Ungleichungssystem<br />
stellt 1947 Dantzig vor. Dazu sei angenommen, dass alle Ecken<br />
x1,x2,...,xm ∈ IR d eines Polyeders P bekannt sind. Der Algorithmus, gestartet mit einer<br />
beliebigen Ecke x0, iteriert solange entlang der Kanten des Polyeders, bis keine<br />
gefundene <strong>Lösung</strong> mehr verbessert werden kann:<br />
1. Finde eine <strong>Lösung</strong> x0.<br />
2. Solange xi nicht optimal, finde xi+1 mit c ⊤ xi+1 ≥ c ⊤ xi, beziehungsweise<br />
c ⊤ xi+1 ≤ c ⊤ xi.<br />
Die ursprüngliche Pivot-Regel von Dantzig wählt als xi+1 jeweils einen Nachbarknoten<br />
von xi, der den maximalen Wert bezüglich der linearen Funktion c ⊤ xi+1 hat. In<br />
Abbildung 3.1(b) ist ein solches Vorgehen skizziert.<br />
(a) Zeichnerische Methode. (b) Pivot-Regel von Dantzig.<br />
Abbildung 3.1: Das Finden eines Optimums auf einem Polytop.<br />
Wenn man annimmt, dass der <strong>Lösung</strong>sraum P endlich ist, so definiert die Konvexkombination<br />
von x1,x2,...,xm ebenfalls einen <strong>Lösung</strong>sraum:<br />
P = conv(x1,x2,...,xm) := {<br />
m<br />
∑<br />
i=1<br />
λixi| λi ≥ 0,<br />
m<br />
∑ λi = 1}.<br />
i=1




