technik leistungselektronik - WebHTB
technik leistungselektronik - WebHTB
technik leistungselektronik - WebHTB

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
TECHNIK LEISTUNGSELEKTRONIK<br />
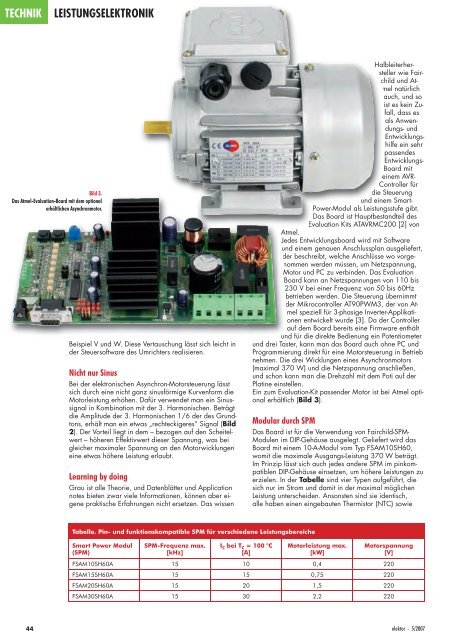
Bild 3.<br />
Das Atmel-Evaluation-Board mit dem optional<br />
erhältlichen Asynchronmotor.<br />
Beispiel V und W. Diese Vertauschung lässt sich leicht in<br />
der Steuersoftware des Umrichters realisieren.<br />
Nicht nur Sinus<br />
Bei der elektronischen Asynchron-Motorsteuerung lässt<br />
sich durch eine nicht ganz sinusförmige Kurvenform die<br />
Motorleistung erhöhen. Dafür verwendet man ein Sinussignal<br />
in Kombination mit der 3. Harmonischen. Beträgt<br />
die Amplitude der 3. Harmonischen 1/6 der des Grundtons,<br />
erhält man ein etwas „rechteckigeres“ Signal (Bild<br />
2). Der Vorteil liegt in dem – bezogen auf den Scheitelwert<br />
– höheren Effektivwert dieser Spannung, was bei<br />
gleicher maximaler Spannung an den Motorwicklungen<br />
eine etwas höhere Leistung erlaubt.<br />
Learning by doing<br />
Grau ist alle Theorie, und Datenblätter und Application<br />
notes bieten zwar viele Informationen, können aber eigene<br />
praktische Erfahrungen nicht ersetzen. Das wissen<br />
Halbleiterhersteller<br />
wie Fairchild<br />
und Atmel<br />
natürlich<br />
auch, und so<br />
ist es kein Zufall,<br />
dass es<br />
als Anwendungs-<br />
und<br />
Entwicklungshilfe<br />
ein sehr<br />
passendes<br />
Entwicklungs-<br />
Board mit<br />
einem AVR-<br />
Controller für<br />
die Steuerung<br />
und einem Smart-<br />
Power-Modul als Leistungsstufe gibt.<br />
Das Board ist Hauptbestandteil des<br />
Evaluation Kits ATAVRMC200 [2] von<br />
Atmel.<br />
Jedes Entwicklungsboard wird mit Software<br />
und einem genauen Anschlussplan ausgeliefert,<br />
der beschreibt, welche Anschlüsse wo vorgenommen<br />
werden müssen, um Netzspannung,<br />
Motor und PC zu verbinden. Das Evaluation<br />
Board kann an Netzspannungen von 110 bis<br />
230 V bei einer Frequenz von 50 bis 60Hz<br />
betrieben werden. Die Steuerung übernimmt<br />
der Mikrocontroller AT90PWM3, der von Atmel<br />
speziell für 3-phasige Inverter-Applikationen<br />
entwickelt wurde [3]. Da der Controller<br />
auf dem Board bereits eine Firmware enthält<br />
und für die direkte Bedienung ein Potentiometer<br />
und drei Taster, kann man das Board auch ohne PC und<br />
Programmierung direkt für eine Motorsteuerung in Betrieb<br />
nehmen. Die drei Wicklungen eines Asynchronmotors<br />
(maximal 370 W) und die Netzspannung anschließen,<br />
und schon kann man die Drehzahl mit dem Poti auf der<br />
Platine einstellen.<br />
Ein zum Evaluation-Kit passender Motor ist bei Atmel optional<br />
erhältlich (Bild 3).<br />
Modular durch SPM<br />
Tabelle. Pin- und funktionskompatible SPM für verschiedene Leistungsbereiche<br />
Smart Power Modul<br />
(SPM)<br />
SPM-Frequenz max.<br />
[kHz]<br />
I C bei T C = 100 °C<br />
[A]<br />
Das Board ist für die Verwendung von Fairchild-SPM-<br />
Modulen im DIP-Gehäuse ausgelegt. Geliefert wird das<br />
Board mit einem 10-A-Modul vom Typ FSAM10SH60,<br />
womit die maximale Ausgangs-Leistung 370 W beträgt.<br />
Im Prinzip lässt sich auch jedes andere SPM im pinkompatiblen<br />
DIP-Gehäuse einsetzen, um höhere Leistungen zu<br />
erzielen. In der Tabelle sind vier Typen aufgeführt, die<br />
sich nur im Strom und damit in der maximal möglichen<br />
Leistung unterscheiden. Ansonsten sind sie identisch,<br />
alle haben einen eingebauten Thermistor (NTC) sowie<br />
Motorleistung max.<br />
[kW]<br />
Motorspannung<br />
[V]<br />
FSAM10SH60A 15 10 0,4 220<br />
FSAM15SH60A 15 15 0,75 220<br />
FSAM20SH60A 15 20 1,5 220<br />
FSAM30SH60A 15 30 2,2 220<br />
44 elektor - 5/2007