

antriebstechnik 1-2/2019
antriebstechnik 1-2/2019
antriebstechnik 1-2/2019
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
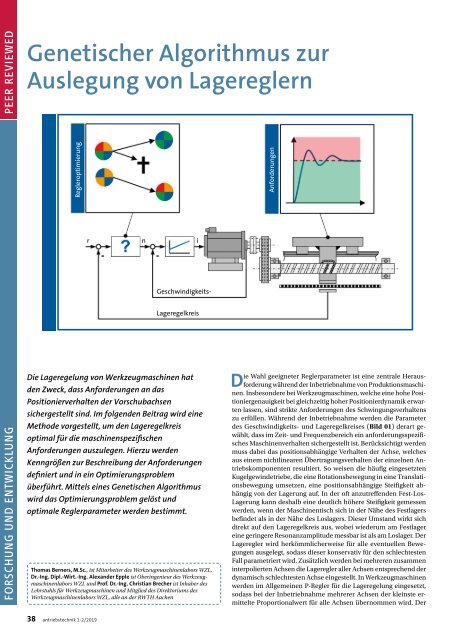
Regleroptimierung<br />
Anforderungen<br />
Genetischer Algorithmus zur<br />
Auslegung von Lagereglern<br />
r n i<br />
Geschwindigkeits-<br />
Lageregelkreis<br />
Die Lageregelung von Werkzeugmaschinen hat<br />
den Zweck, dass Anforderungen an das<br />
Positionierverhalten der Vorschubachsen<br />
sichergestellt sind. Im folgenden Beitrag wird eine<br />
Methode vorgestellt, um den Lageregelkreis<br />
optimal für die maschinenspezifischen<br />
Anforderungen auszulegen. Hierzu werden<br />
Kenngrößen zur Beschreibung der Anforderungen<br />
definiert und in ein Optimierungsproblem<br />
überführt. Mittels eines Genetischen Algorithmus<br />
wird das Optimierungsproblem gelöst und<br />
optimale Reglerparameter werden bestimmt.<br />
Thomas Berners, M.Sc., ist Mitarbeiter des Werkzeugmaschinenlabors WZL,<br />
Dr.-Ing. Dipl.-Wirt.-Ing. Alexander Epple ist Oberingenieur des Werkzeugmaschinenlabors<br />
WZL und Prof. Dr.-Ing. Christian Brecher ist Inhaber des<br />
Lehrstuhls für Werkzeugmaschinen und Mitglied des Direktoriums des<br />
Werkzeugmaschinenlabors WZL, alle an der RWTH Aachen<br />
Die Wahl geeigneter Reglerparameter ist eine zentrale Herausforderung<br />
während der Inbetriebnahme von Produktionsmaschinen.<br />
Insbesondere bei Werkzeugmaschinen, welche eine hohe Positioniergenauigkeit<br />
bei gleichzeitig hoher Positionierdynamik erwarten<br />
lassen, sind strikte Anforderungen des Schwingungsverhaltens<br />
zu erfüllen. Während der Inbetriebnahme werden die Parameter<br />
des Geschwindigkeits- und Lageregelkreises (Bild 01) derart gewählt,<br />
dass im Zeit- und Frequenzbereich ein anforderungsspezifisches<br />
Maschinenverhalten sichergestellt ist. Berücksichtigt werden<br />
muss dabei das positionsabhängige Verhalten der Achse, welches<br />
aus einem nichtlinearen Übertragungsverhalten der einzelnen Antriebskomponenten<br />
resultiert. So weisen die häufig eingesetzten<br />
Kugelgewindetriebe, die eine Rotationsbewegung in eine Translationsbewegung<br />
umsetzen, eine positionsabhängige Steifigkeit abhängig<br />
von der Lagerung auf. In der oft anzutreffenden Fest-Los-<br />
Lagerung kann deshalb eine deutlich höhere Steifigkeit gemessen<br />
werden, wenn der Maschinentisch sich in der Nähe des Festlagers<br />
befindet als in der Nähe des Loslagers. Dieser Umstand wirkt sich<br />
direkt auf den Lageregelkreis aus, wobei wiederum am Festlager<br />
eine geringere Resonanzamplitude messbar ist als am Loslager. Der<br />
Lageregler wird herkömmlicherweise für alle eventuellen Bewegungen<br />
ausgelegt, sodass dieser konservativ für den schlechtesten<br />
Fall parametriert wird. Zusätzlich werden bei mehreren zusammen<br />
interpolierten Achsen die Lageregler aller Achsen entsprechend der<br />
dynamisch schlechtesten Achse eingestellt. In Werkzeugmaschinen<br />
werden im Allgemeinen P-Regler für die Lageregelung eingesetzt,<br />
sodass bei der Inbetriebnahme mehrerer Achsen der kleinste ermittelte<br />
Proportionalwert für alle Achsen übernommen wird. Der<br />
38 <strong>antriebstechnik</strong> 1-2/<strong>2019</strong>














