DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
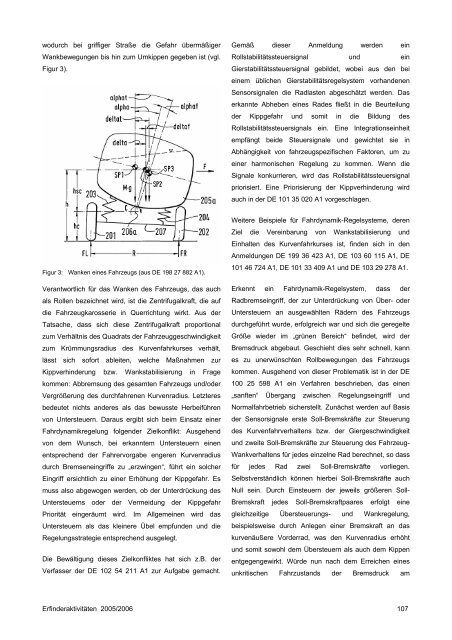
wodurch bei griffiger Straße die Gefahr übermäßiger<br />
Wankbewegungen bis hin zum Umkippen gegeben ist (vgl.<br />
Figur 3).<br />
Figur 3: Wanken eines Fahrzeugs (aus DE 198 27 882 A1).<br />
Verantwortlich für das Wanken des Fahrzeugs, das auch<br />
als Rollen bezeichnet wird, ist die Zentrifugalkraft, die auf<br />
die Fahrzeugkarosserie in Querrichtung wirkt. Aus der<br />
Tatsache, dass sich diese Zentrifugalkraft proportional<br />
zum Verhältnis des Quadrats der Fahrzeuggeschwindigkeit<br />
zum Krümmungsradius des Kurvenfahrkurses verhält,<br />
lässt sich sofort ableiten, welche Maßnahmen zur<br />
Kippverhinderung bzw. Wankstabilisierung in Frage<br />
kommen: Abbremsung des gesamten Fahrzeugs und/oder<br />
Vergrößerung des durchfahrenen Kurvenradius. Letzteres<br />
bedeutet nichts anderes als das bewusste Herbeiführen<br />
von Untersteuern. Daraus ergibt sich beim Einsatz einer<br />
Fahrdynamikregelung folgender Zielkonflikt: Ausgehend<br />
von dem Wunsch, bei erkanntem Untersteuern einen<br />
entsprechend der Fahrervorgabe engeren Kurvenradius<br />
durch Bremseneingriffe zu „erzwingen“, führt ein solcher<br />
Eingriff ersichtlich zu einer Erhöhung der Kippgefahr. Es<br />
muss also abgewogen werden, ob der Unterdrückung des<br />
Untersteuerns oder der Vermeidung der Kippgefahr<br />
Priorität eingeräumt wird. Im Allgemeinen wird das<br />
Untersteuern als das kleinere Übel empfunden und die<br />
Regelungsstrategie entsprechend ausgelegt.<br />
Die Bewältigung dieses Zielkonfliktes hat sich z.B. der<br />
Verfasser der DE 102 54 211 A1 zur Aufgabe gemacht.<br />
Gemäß dieser Anmeldung werden ein<br />
Rollstabilitätssteuersignal und ein<br />
Gierstabilitätssteuersignal gebildet, wobei aus den bei<br />
einem üblichen Gierstabilitätsregelsystem vorhandenen<br />
Sensorsignalen die Radlasten abgeschätzt werden. Das<br />
erkannte Abheben eines Rades fließt in die Beurteilung<br />
der Kippgefahr und somit in die Bildung des<br />
Rollstabilitätssteuersignals ein. Eine Integrationseinheit<br />
empfängt beide Steuersignale und gewichtet sie in<br />
Abhängigkeit von fahrzeugspezifischen Faktoren, um zu<br />
einer harmonischen Regelung zu kommen. Wenn die<br />
Signale konkurrieren, wird das Rollstabilitätssteuersignal<br />
priorisiert. Eine Priorisierung der Kippverhinderung wird<br />
auch in der DE 101 35 020 A1 vorgeschlagen.<br />
Weitere Beispiele für Fahrdynamik-Regelsysteme, deren<br />
Ziel die Vereinbarung von Wankstabilisierung und<br />
Einhalten des Kurvenfahrkurses ist, finden sich in den<br />
Anmeldungen DE 199 36 423 A1, DE 103 60 115 A1, DE<br />
101 46 724 A1, DE 101 33 409 A1 und DE 103 29 278 A1.<br />
Erkennt ein Fahrdynamik-Regelsystem, dass der<br />
Radbremseingriff, der zur Unterdrückung von Über- oder<br />
Untersteuern an ausgewählten Rädern des Fahrzeugs<br />
durchgeführt wurde, erfolgreich war und sich die geregelte<br />
Größe wieder im „grünen Bereich“ befindet, wird der<br />
Bremsdruck abgebaut. Geschieht dies sehr schnell, kann<br />
es zu unerwünschten Rollbewegungen des Fahrzeugs<br />
kommen. Ausgehend von dieser Problematik ist in der DE<br />
100 25 598 A1 ein Verfahren beschrieben, das einen<br />
„sanften“ Übergang zwischen Regelungseingriff und<br />
Normalfahrbetrieb sicherstellt. Zunächst werden auf Basis<br />
der Sensorsignale erste Soll-Bremskräfte zur Steuerung<br />
des Kurvenfahrverhaltens bzw. der Giergeschwindigkeit<br />
und zweite Soll-Bremskräfte zur Steuerung des Fahrzeug-<br />
Wankverhaltens für jedes einzelne Rad berechnet, so dass<br />
für jedes Rad zwei Soll-Bremskräfte vorliegen.<br />
Selbstverständlich können hierbei Soll-Bremskräfte auch<br />
Null sein. Durch Einsteuern der jeweils größeren Soll-<br />
Bremskraft jedes Soll-Bremskraftpaares erfolgt eine<br />
gleichzeitige Übersteuerungs- und Wankregelung,<br />
beispielsweise durch Anlegen einer Bremskraft an das<br />
kurvenäußere Vorderrad, was den Kurvenradius erhöht<br />
und somit sowohl dem Übersteuern als auch dem Kippen<br />
entgegengewirkt. Würde nun nach dem Erreichen eines<br />
unkritischen Fahrzustands der Bremsdruck am<br />
<strong>Erfinderaktivitäten</strong> <strong>2005</strong>/<strong>2006</strong> 107