DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6. Planung von Zugangswegen zum Situs<br />
Nicht zuletzt gestattet die Steigerung der Orts- und<br />
Zeitauflösung sowie des Informationsgehaltes der<br />
dreidimensionalen Bilder eine zuverlässigere Planung von<br />
Zugangswegen (engl. „road map“) sowie eine genauere<br />
Berechnung der Position und Lage des Zieles oder<br />
Zielgebietes. So kann ein chirurgisches Instrument im<br />
Körper eines Patienten noch schonender navigiert werden.<br />
Die sorgfältige Planung von solchen Zugangswegen ist<br />
gerade in der „minimal-invasiven Chirurgie“ („MIC“)<br />
unbedingt erforderlich, falls ein „CAS“-System dort<br />
eingesetzt wird,.<br />
Die auf diese Weg-Planung und Berechnung des<br />
Zielpunktes (griech. „Stereotaxie“) folgende Behandlung<br />
erfolgt mit der Hilfe eines Zielgerätes. Speziell in der<br />
Neurochirurgie wird ein solches Zielgerät auch<br />
„stereotaktischer Rahmen“ genannt, welcher der<br />
mechanischen Instrumentenführung dient und am Kopf<br />
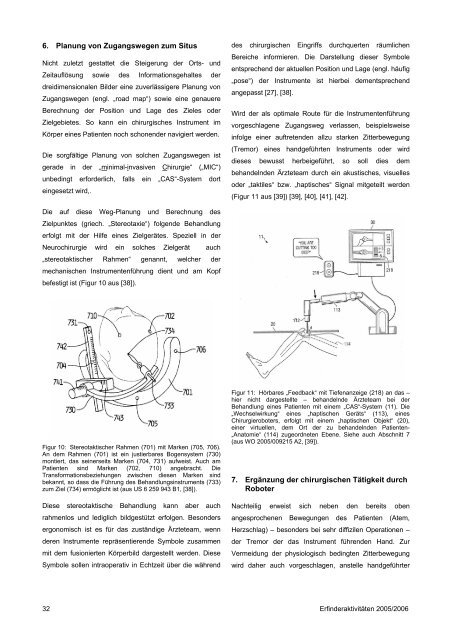
befestigt ist (Figur 10 aus [38]).<br />
Figur 10: Stereotaktischer Rahmen (701) mit Marken (705, 706).<br />
An dem Rahmen (701) ist ein justierbares Bogensystem (730)<br />
montiert, das seinerseits Marken (704, 731) aufweist. Auch am<br />
Patienten sind Marken (702, 710) angebracht. Die<br />
Transformationsbeziehungen zwischen diesen Marken sind<br />
bekannt, so dass die Führung des Behandlungsinstruments (733)<br />
zum Ziel (734) ermöglicht ist (aus US 6 259 943 B1, [38]).<br />
Diese stereotaktische Behandlung kann aber auch<br />
rahmenlos und lediglich bildgestützt erfolgen. Besonders<br />
ergonomisch ist es für das zuständige Ärzteteam, wenn<br />
deren Instrumente repräsentierende Symbole zusammen<br />
mit dem fusionierten Körperbild dargestellt werden. Diese<br />
Symbole sollen intraoperativ in Echtzeit über die während<br />
des chirurgischen Eingriffs durchquerten räumlichen<br />
Bereiche informieren. Die Darstellung dieser Symbole<br />
entsprechend der aktuellen Position und Lage (engl. häufig<br />
„pose“) der Instrumente ist hierbei dementsprechend<br />
angepasst [27], [38].<br />
Wird der als optimale Route für die Instrumentenführung<br />
vorgeschlagene Zugangsweg verlassen, beispielsweise<br />
infolge einer auftretenden allzu starken Zitterbewegung<br />
(Tremor) eines handgeführten Instruments oder wird<br />
dieses bewusst herbeigeführt, so soll dies dem<br />
behandelnden Ärzteteam durch ein akustisches, visuelles<br />
oder „taktiles“ bzw. „haptisches“ Signal mitgeteilt werden<br />
(Figur 11 aus [39]) [39], [40], [41], [42].<br />
Figur 11: Hörbares „Feedback“ mit Tiefenanzeige (218) an das –<br />
hier nicht dargestellte – behandelnde Ärzteteam bei der<br />
Behandlung eines Patienten mit einem „CAS“-System (11). Die<br />
„Wechselwirkung“ eines „haptischen Geräts“ (113), eines<br />
Chirurgieroboters, erfolgt mit einem „haptischen Objekt“ (20),<br />
einer virtuellen, dem Ort der zu behandelnden Patienten-<br />
„Anatomie“ (114) zugeordneten Ebene. Siehe auch Abschnitt 7<br />
(aus WO <strong>2005</strong>/009215 A2, [39]).<br />
7. Ergänzung der chirurgischen Tätigkeit durch<br />
Roboter<br />
Nachteilig erweist sich neben den bereits oben<br />
angesprochenen Bewegungen des Patienten (Atem,<br />
Herzschlag) – besonders bei sehr diffizilen Operationen –<br />
der Tremor der das Instrument führenden Hand. Zur<br />
Vermeidung der physiologisch bedingten Zitterbewegung<br />
wird daher auch vorgeschlagen, anstelle handgeführter<br />
32 <strong>Erfinderaktivitäten</strong> <strong>2005</strong>/<strong>2006</strong>