DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006
DPMA - Erfinderaktivitäten 2005/2006

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
chirurgischer Instrumente, diese durch einen steuerbaren,<br />
das jeweilige Instrument haltenden „Arm“ oder Roboter<br />
auszuführen [43], [44], [45].<br />
Ein derartiger Einsatz von Robotern sowie die<br />
Kommunikationsmöglichkeiten der derzeitigen Vernetzung,<br />
wozu auch das Internet gehört, ermöglichen sogar – dies<br />
ist allerdings derzeit noch eher als futuristisch anzusehen<br />
–, dass eine ortsübergreifende Operation durch zwei<br />
entfernt voneinander handelnde Ärzteteams erfolgt (sog.<br />
Tele-Operation) [41], [46], [47], [48], [49]. Hingegen wird<br />
derzeit bereits bundesweit ein Teleradiologienetzwerk mit<br />
hundert Teilnehmern, beispielsweise Krankenhäusern,<br />
betrieben [50]. Hierbei erhält der anfragende Arzt eines<br />
Krankenhauses nach dessen Bildübertragung in das<br />
zentrale Rechenzentrum innerhalb kürzester Zeit den<br />
zugehörigen Befund eines dort durchgehend tätigen<br />
Teleradiologen.<br />
Zur Erhöhung der Präzision hinsichtlich der Positionierung<br />
von chirurgischen Instrumenten, welche gerade auf dem<br />
Gebiet der minimal-invasiven Eingriffe von größter<br />
Bedeutung ist, werden Teleoperations-Systeme mit „aus<br />
der Ferne“ gesteuerten Manipulatoren, also auch<br />
Robotern, durch entsprechende haptische Schnittstellen<br />
ergänzt [39], [42]. Solche haptischen Schnittstellen<br />
vermitteln das ursprünglich vom chirurgischen Instrument<br />
beim Berühren oder Bearbeiten von Teilen des Körpers mit<br />
unterschiedlichen Gewebearten vermittelte jeweils<br />
charakteristische Gefühl, indem dieses von den<br />
Schnittstellen zugeordneten Rechenprogramm-<br />
Komponenten simuliert wird.<br />
8. Magnetische Navigation<br />
Weniger futuristisch mutet hingegen als Variante oder<br />
auch optional zu der vorgenannten marken-basierten<br />
Navigationstechnologie die „magnetische Navigation“ an.<br />
Diese ermöglicht die Steuerung eines ein magnetisches<br />
Bauteil aufweisenden Instruments im Körper eines<br />
Patienten, beispielsweise eines Kapsel-Endoskops [51]<br />
oder eines magnetischen Katheters [52], [53]. Ein gezielt<br />
veränderliches äußeres magnetisches Feld erlaubt die<br />
Navigation dieses Instruments zum gewünschten Ziel im<br />
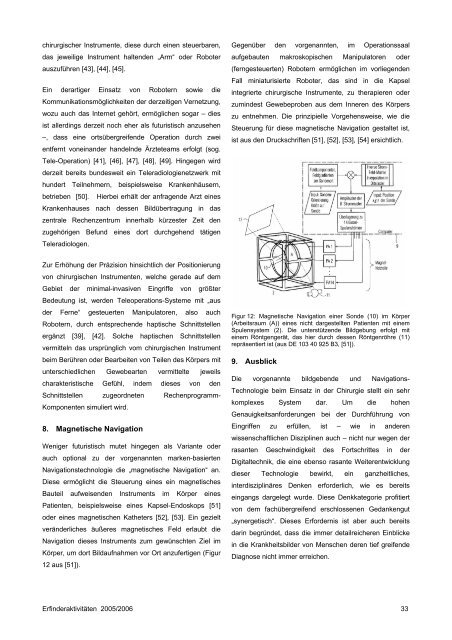
Körper, um dort Bildaufnahmen vor Ort anzufertigen (Figur<br />
12 aus [51]).<br />
Gegenüber den vorgenannten, im Operationssaal<br />
aufgebauten makroskopischen Manipulatoren oder<br />
(ferngesteuerten) Robotern ermöglichen im vorliegenden<br />
Fall miniaturisierte Roboter, das sind in die Kapsel<br />
integrierte chirurgische Instrumente, zu therapieren oder<br />
zumindest Gewebeproben aus dem Inneren des Körpers<br />
zu entnehmen. Die prinzipielle Vorgehensweise, wie die<br />
Steuerung für diese magnetische Navigation gestaltet ist,<br />
ist aus den Druckschriften [51], [52], [53], [54] ersichtlich.<br />
Figur 12: Magnetische Navigation einer Sonde (10) im Körper<br />
(Arbeitsraum (A)) eines nicht dargestellten Patienten mit einem<br />
Spulensystem (2). Die unterstützende Bildgebung erfolgt mit<br />
einem Röntgengerät, das hier durch dessen Röntgenröhre (11)<br />
repräsentiert ist (aus DE 103 40 925 B3, [51]).<br />
9. Ausblick<br />
Die vorgenannte bildgebende und Navigations-<br />
Technologie beim Einsatz in der Chirurgie stellt ein sehr<br />
komplexes System dar. Um die hohen<br />
Genauigkeitsanforderungen bei der Durchführung von<br />
Eingriffen zu erfüllen, ist – wie in anderen<br />
wissenschaftlichen Disziplinen auch – nicht nur wegen der<br />
rasanten Geschwindigkeit des Fortschrittes in der<br />
Digitaltechnik, die eine ebenso rasante Weiterentwicklung<br />
dieser Technologie bewirkt, ein ganzheitliches,<br />
interdisziplinäres Denken erforderlich, wie es bereits<br />
eingangs dargelegt wurde. Diese Denkkategorie profitiert<br />
von dem fachübergreifend erschlossenen Gedankengut<br />
„synergetisch“. Dieses Erfordernis ist aber auch bereits<br />
darin begründet, dass die immer detailreicheren Einblicke<br />
in die Krankheitsbilder von Menschen deren tief greifende<br />
Diagnose nicht immer erreichen.<br />
<strong>Erfinderaktivitäten</strong> <strong>2005</strong>/<strong>2006</strong> 33