cahier scientifique revue technique luxembourgeoise
cahier scientifique revue technique luxembourgeoise
cahier scientifique revue technique luxembourgeoise

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
g<br />
With Java chosen as the programming language, no further<br />
adjustment of the byte code is necessary after the deployment<br />
onto the target system.<br />
Network forming and security issues as authenticity and integrity<br />
of messages are taken care of by the Zigbee stack<br />
on the communication modems, which are attached to<br />
the embedded controller through a standard serial interface<br />
(see fi gure below) and are thus easily exchangeable by<br />
other, potentially longer range protocols, e.g. WiMax (IEEE<br />
802.16), extending the segment size from typically 100m to<br />
several kilometres.<br />
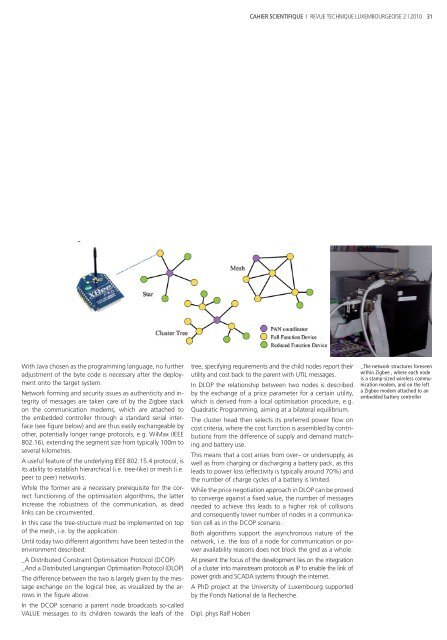
A useful feature of the underlying IEEE 802.15.4 protocol, is<br />
its ability to establish hierarchical (i.e. tree-like) or mesh (i.e.<br />
peer to peer) networks.<br />
While the former are a necessary prerequisite for the correct<br />
functioning of the optimisation algorithms, the latter<br />
increase the robustness of the communication, as dead<br />
links can be circumvented.<br />
In this case the tree-structure must be implemented on top<br />
of the mesh, i.e. by the application.<br />
Until today two different algorithms have been tested in the<br />
environment described:<br />
_A Distributed Constraint Optimisation Protocol (DCOP)<br />
_And a Distributed Langrangian Optimisation Protocol (DLOP)<br />
The difference between the two is largely given by the message<br />
exchange on the logical tree, as visualized by the arrows<br />
in the fi gure above.<br />
In the DCOP scenario a parent node broadcasts so-called<br />
VALUE messages to its children towards the leafs of the<br />
tree, specifying requirements and the child nodes report their<br />
utility and cost back to the parent with UTIL messages.<br />
In DLOP the relationship between two nodes is described<br />
by the exchange of a price parameter for a certain utility,<br />
which is derived from a local optimisation procedure, e.g.<br />
Quadratic Programming, aiming at a bilateral equilibrium.<br />
The cluster head then selects its preferred power fl ow on<br />
cost criteria, where the cost function is assembled by contributions<br />
from the difference of supply and demand matching<br />
and battery use.<br />
This means that a cost arises from over– or undersupply, as<br />
well as from charging or discharging a battery pack, as this<br />
leads to power loss (effectivity is typically around 70%) and<br />
the number of charge cycles of a battery is limited.<br />
While the price negotiation approach in DLOP can be proved<br />
to converge against a fi xed value, the number of messages<br />
needed to achieve this leads to a higher risk of collisions<br />
and consequently lower number of nodes in a communication<br />
cell as in the DCOP scenario.<br />
Both algorithms support the asynchronous nature of the<br />
network, i.e. the loss of a node for communication or power<br />
availability reasons does not block the grid as a whole.<br />
At present the focus of the development lies on the integration<br />
of a cluster into mainstream protocols as IP to enable the link of<br />
power grids and SCADA systems through the internet.<br />
A PhD project at the University of Luxembourg supported<br />
by the Fonds National de la Recherche.<br />
Dipl. phys Ralf Hoben<br />
CAHIER SCIENTIFIQUE | REVUE TECHNIQUE LUXEMBOURGEOISE 2 | 2010<br />
31<br />
_The network structures foreseen<br />
within Zigbee , where each node<br />
is a stamp-sized wireless communication<br />
modem, and on the left<br />
a Zigbee modem attached to an<br />
embedded battery controller