Numerical modeling of waves for a tsunami early warning system
Numerical modeling of waves for a tsunami early warning system
Numerical modeling of waves for a tsunami early warning system

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Numerical</strong> <strong>modeling</strong> <strong>of</strong> <strong>waves</strong> <strong>for</strong> a <strong>tsunami</strong> <strong>early</strong> <strong>warning</strong> <strong>system</strong><br />
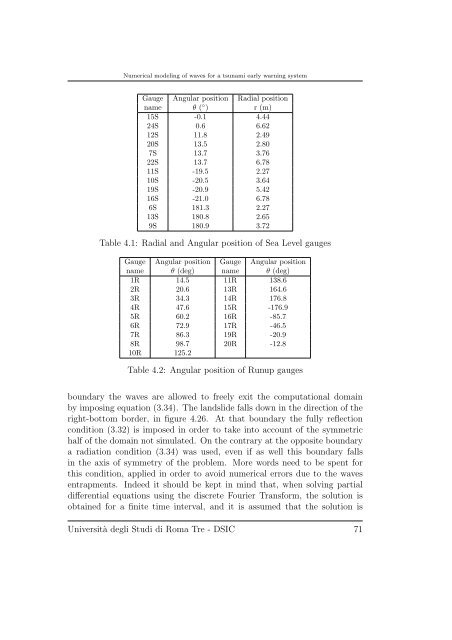
Gauge Angular position Radial position<br />
name θ ( ◦ ) r(m)<br />
15S -0.1 4.44<br />
24S 0.6 6.62<br />
12S 11.8 2.49<br />
20S 13.5 2.80<br />
7S 13.7 3.76<br />
22S 13.7 6.78<br />
11S -19.5 2.27<br />
10S -20.5 3.64<br />
19S -20.9 5.42<br />
16S -21.0 6.78<br />
6S 181.3 2.27<br />
13S 180.8 2.65<br />
9S 180.9 3.72<br />
Table 4.1: Radial and Angular position <strong>of</strong> Sea Level gauges<br />
Gauge Angular position Gauge Angular position<br />
name θ (deg) name θ (deg)<br />
1R 14.5 11R 138.6<br />
2R 20.6 13R 164.6<br />
3R 34.3 14R 176.8<br />
4R 47.6 15R -176.9<br />
5R 60.2 16R -85.7<br />
6R 72.9 17R -46.5<br />
7R 86.3 19R -20.9<br />
8R 98.7 20R -12.8<br />
10R 125.2<br />
Table 4.2: Angular position <strong>of</strong> Runup gauges<br />
boundary the <strong>waves</strong> are allowed to freely exit the computational domain<br />
by imposing equation (3.34). The landslide falls down in the direction <strong>of</strong> the<br />
right-bottom border, in figure 4.26. At that boundary the fully reflection<br />
condition (3.32) is imposed in order to take into account <strong>of</strong> the symmetric<br />
half <strong>of</strong> the domain not simulated. On the contrary at the opposite boundary<br />
a radiation condition (3.34) was used, even if as well this boundary falls<br />
in the axis <strong>of</strong> symmetry <strong>of</strong> the problem. More words need to be spent <strong>for</strong><br />
this condition, applied in order to avoid numerical errors due to the <strong>waves</strong><br />
entrapments. Indeed it should be kept in mind that, when solving partial<br />
differential equations using the discrete Fourier Trans<strong>for</strong>m, the solution is<br />
obtained <strong>for</strong> a finite time interval, and it is assumed that the solution is<br />
Università degli Studi di Roma Tre - DSIC 71