PhD Fekete - SZIE version - 2.2 - Szent István Egyetem
PhD Fekete - SZIE version - 2.2 - Szent István Egyetem
PhD Fekete - SZIE version - 2.2 - Szent István Egyetem

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Literature review<br />
The presented model [Van Eijden et al., 1986] describes a set of non-linear equations<br />
(nine equations), which was solved by Newton-Raphson iteration process [Newton, 1711,<br />
Raphson, 1690]. The model can be applied primarily for static situations, and the transmission<br />
of the forces is realized by the followings: a force F q exerted by the quadriceps tendon is<br />
counteracted by a force F pt in the patellar tendon. The resultant force of these two forces is the<br />
F pf , the patellofemoral compression force, which is the reaction force between the patella and<br />
the femur.<br />
The most important findings of the authors are the followings:<br />
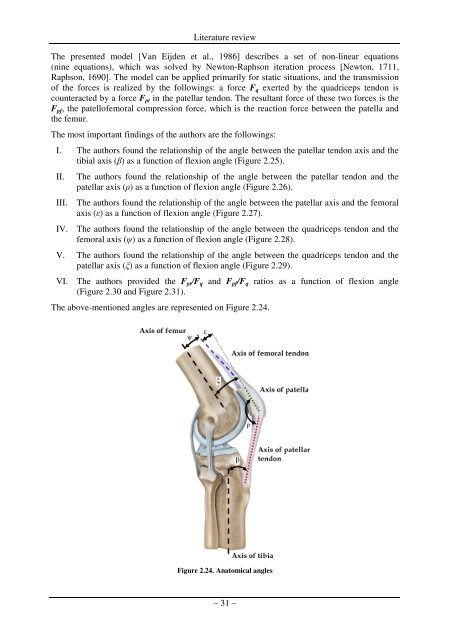
I. The authors found the relationship of the angle between the patellar tendon axis and the<br />
tibial axis (β) as a function of flexion angle (Figure <strong>2.2</strong>5).<br />
II.<br />
The authors found the relationship of the angle between the patellar tendon and the<br />
patellar axis (ρ) as a function of flexion angle (Figure <strong>2.2</strong>6).<br />
III. The authors found the relationship of the angle between the patellar axis and the femoral<br />
axis (ε) as a function of flexion angle (Figure <strong>2.2</strong>7).<br />
IV. The authors found the relationship of the angle between the quadriceps tendon and the<br />
femoral axis (ψ) as a function of flexion angle (Figure <strong>2.2</strong>8).<br />
V. The authors found the relationship of the angle between the quadriceps tendon and the<br />
patellar axis (ξ) as a function of flexion angle (Figure <strong>2.2</strong>9).<br />
VI. The authors provided the F pt /F q and F pf /F q ratios as a function of flexion angle<br />
(Figure 2.30 and Figure 2.31).<br />
The above-mentioned angles are represented on Figure <strong>2.2</strong>4.<br />
Figure <strong>2.2</strong>4. Anatomical angles<br />
– 31 –