PhD Fekete - SZIE version - 2.2 - Szent István Egyetem
PhD Fekete - SZIE version - 2.2 - Szent István Egyetem
PhD Fekete - SZIE version - 2.2 - Szent István Egyetem

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
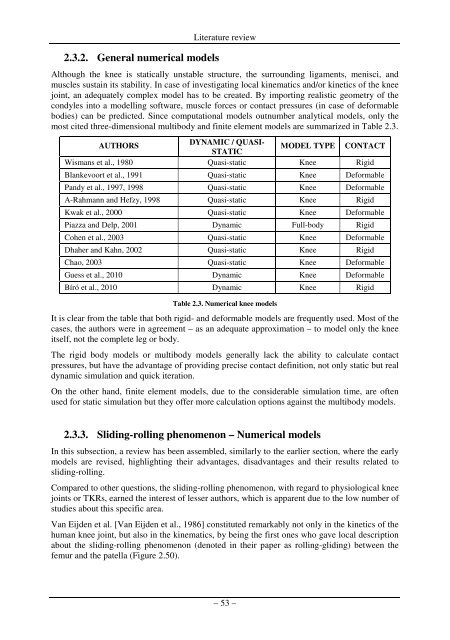
2.3.2. General numerical models<br />
Literature review<br />
Although the knee is statically unstable structure, the surrounding ligaments, menisci, and<br />
muscles sustain its stability. In case of investigating local kinematics and/or kinetics of the knee<br />
joint, an adequately complex model has to be created. By importing realistic geometry of the<br />
condyles into a modelling software, muscle forces or contact pressures (in case of deformable<br />
bodies) can be predicted. Since computational models outnumber analytical models, only the<br />
most cited three-dimensional multibody and finite element models are summarized in Table 2.3.<br />
AUTHORS<br />
DYNAMIC / QUASI-<br />
MODEL TYPE CONTACT<br />
STATIC<br />
Wismans et al., 1980 Quasi-static Knee Rigid<br />
Blankevoort et al., 1991 Quasi-static Knee Deformable<br />
Pandy et al., 1997, 1998 Quasi-static Knee Deformable<br />
A-Rahmann and Hefzy, 1998 Quasi-static Knee Rigid<br />
Kwak et al., 2000 Quasi-static Knee Deformable<br />
Piazza and Delp, 2001 Dynamic Full-body Rigid<br />
Cohen et al., 2003 Quasi-static Knee Deformable<br />
Dhaher and Kahn, 2002 Quasi-static Knee Rigid<br />
Chao, 2003 Quasi-static Knee Deformable<br />
Guess et al., 2010 Dynamic Knee Deformable<br />
Bíró et al., 2010 Dynamic Knee Rigid<br />
Table 2.3. Numerical knee models<br />
It is clear from the table that both rigid- and deformable models are frequently used. Most of the<br />
cases, the authors were in agreement – as an adequate approximation – to model only the knee<br />
itself, not the complete leg or body.<br />
The rigid body models or multibody models generally lack the ability to calculate contact<br />
pressures, but have the advantage of providing precise contact definition, not only static but real<br />
dynamic simulation and quick iteration.<br />
On the other hand, finite element models, due to the considerable simulation time, are often<br />
used for static simulation but they offer more calculation options against the multibody models.<br />
2.3.3. Sliding-rolling phenomenon – Numerical models<br />
In this subsection, a review has been assembled, similarly to the earlier section, where the early<br />
models are revised, highlighting their advantages, disadvantages and their results related to<br />
sliding-rolling.<br />
Compared to other questions, the sliding-rolling phenomenon, with regard to physiological knee<br />
joints or TKRs, earned the interest of lesser authors, which is apparent due to the low number of<br />
studies about this specific area.<br />
Van Eijden et al. [Van Eijden et al., 1986] constituted remarkably not only in the kinetics of the<br />
human knee joint, but also in the kinematics, by being the first ones who gave local description<br />
about the sliding-rolling phenomenon (denoted in their paper as rolling-gliding) between the<br />
femur and the patella (Figure 2.50).<br />
– 53 –