

PDF 1.938kB
PDF 1.938kB
PDF 1.938kB

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1.2. OVERVIEW OF THE TRANSFORMATION PROBLEM SPACE 3<br />
Joint 3<br />
Link 4<br />
Link 3<br />
Joint 2<br />
Joint 1<br />
Link 2<br />
Link 1<br />
Figure 1.3: Abstract robot model consisting of links and joints.<br />
If collision avoidance should be done by using the laser scanner on the arm, the laser scan captured<br />
in the laser_frame must be transformed into the base_frame. This includes all single<br />
transformations in the branch from the base to the laser and is called a transformation chain (tf chain).<br />
A tf chain always consists of all transformations which have to be applied to get from one frame to<br />
another frame.<br />
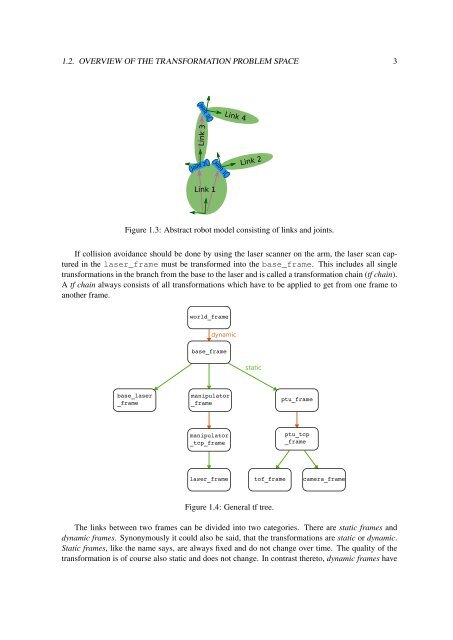
Figure 1.4: General tf tree.<br />
The links between two frames can be divided into two categories. There are static frames and<br />
dynamic frames. Synonymously it could also be said, that the transformations are static or dynamic.<br />
Static frames, like the name says, are always fixed and do not change over time. The quality of the<br />
transformation is of course also static and does not change. In contrast thereto, dynamic frames have














