

PDF 1.938kB
PDF 1.938kB
PDF 1.938kB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
44 CHAPTER 4. METHOD<br />
In the example the default rotation (see Section 3.1) is considered to be zero for all frames. The<br />
vector of the default translation o, as well as the values for the state vector x and the covariance matrix<br />
P are listed below for each frame. The default translation is just called Translation and describes the<br />
translation between the Parent and Child frame when the joint is in the default position. The state<br />
vector consists of the current position s and velocity v. In the case of a revolute joint the position is<br />
the angle in rad and in the case of a prismatic joint, it is the distance in cm from the default position.<br />
The state vector and covariance matrix, thus are defined as<br />
x =<br />
P =<br />
[ s<br />
v]<br />
[ ] σ<br />
2<br />
s 0<br />
0 σ 2 v<br />
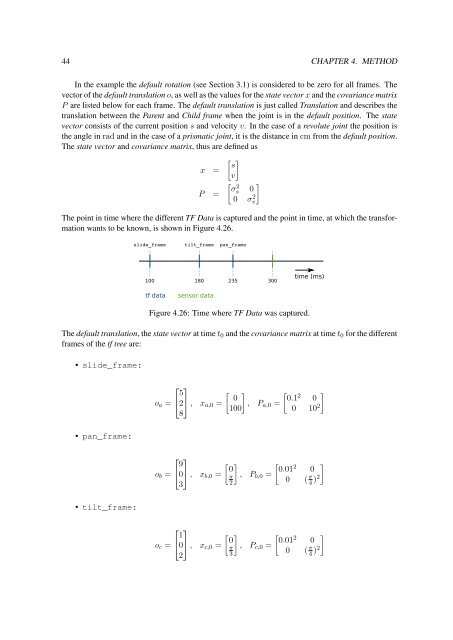
The point in time where the different TF Data is captured and the point in time, at which the transformation<br />
wants to be known, is shown in Figure 4.26.<br />
slide_frame<br />
tilt_frame<br />
pan_frame<br />
100 180 235 300<br />
time (ms)<br />
tf data<br />
sensor data<br />
Figure 4.26: Time where TF Data was captured.<br />
The default translation, the state vector at time t 0 and the covariance matrix at time t 0 for the different<br />
frames of the tf tree are:<br />
• slide_frame:<br />
• pan_frame:<br />
• tilt_frame:<br />
⎡ ⎤<br />
5<br />
o a = ⎣2⎦ , x a,0 =<br />
8<br />
⎡ ⎤<br />
9<br />
o b = ⎣0⎦ , x b,0 =<br />
3<br />
⎡ ⎤<br />
1<br />
o c = ⎣0⎦ , x c,0 =<br />
2<br />
[ ] [ ]<br />
0<br />
0.1<br />
2<br />
0<br />
, P<br />
100 a,0 =<br />
0 10 2<br />
[ 0<br />
π<br />
2<br />
[ 0<br />
π<br />
3<br />
] [ ]<br />
0.01<br />
2<br />
0<br />
, P b,0 =<br />
0 ( π 4 )2<br />
] [ ]<br />
0.01<br />
2<br />
0<br />
, P c,0 =<br />
0 ( π 4 )2














