

PDF 1.938kB
PDF 1.938kB
PDF 1.938kB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
tilt_frame<br />
sensor_frame<br />
4.6. CONSTRUCTING TF SYSTEMS 47<br />
This homogeneous matrix can also be represented as a translation vector and a rotation described with<br />
an zyx Euler sequence.<br />
⎡ ⎤ ⎡ ⎤<br />
x 37.3428<br />
⎣y⎦ = ⎣ 2.3425 ⎦ cm,<br />
z 15.7256<br />
⎡ ⎤ ⎡ ⎤<br />
φ x 0<br />
⎣θ y<br />
⎦ = ⎣7.20⎦ deg<br />
ψ z 5.85<br />
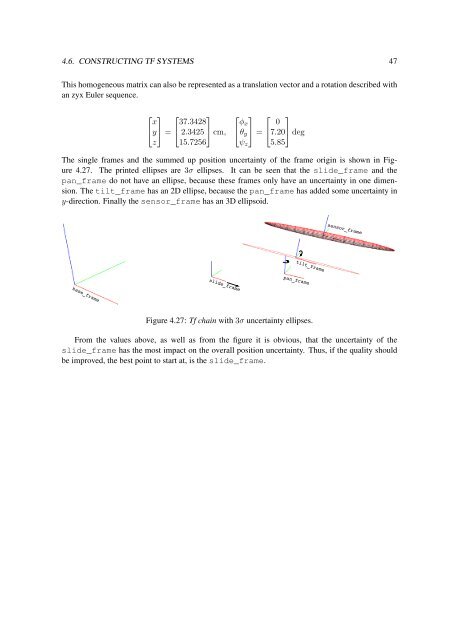
The single frames and the summed up position uncertainty of the frame origin is shown in Figure<br />
4.27. The printed ellipses are 3σ ellipses. It can be seen that the slide_frame and the<br />
pan_frame do not have an ellipse, because these frames only have an uncertainty in one dimension.<br />
The tilt_frame has an 2D ellipse, because the pan_frame has added some uncertainty in<br />
y-direction. Finally the sensor_frame has an 3D ellipsoid.<br />
slide_frame<br />
pan_frame<br />
base_frame<br />
Figure 4.27: Tf chain with 3σ uncertainty ellipses.<br />
From the values above, as well as from the figure it is obvious, that the uncertainty of the<br />
slide_frame has the most impact on the overall position uncertainty. Thus, if the quality should<br />
be improved, the best point to start at, is the slide_frame.














