

PDF 1.938kB
PDF 1.938kB
PDF 1.938kB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.1. USE CASES 21<br />
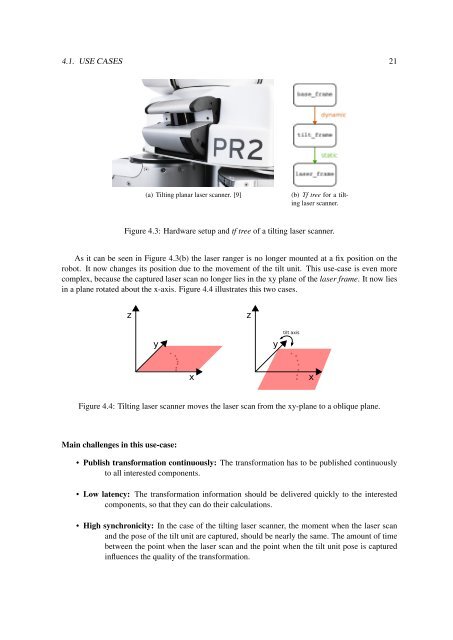
(a) Tilting planar laser scanner. [9]<br />
(b) Tf tree for a tilting<br />
laser scanner.<br />
Figure 4.3: Hardware setup and tf tree of a tilting laser scanner.<br />
As it can be seen in Figure 4.3(b) the laser ranger is no longer mounted at a fix position on the<br />
robot. It now changes its position due to the movement of the tilt unit. This use-case is even more<br />
complex, because the captured laser scan no longer lies in the xy plane of the laser frame. It now lies<br />
in a plane rotated about the x-axis. Figure 4.4 illustrates this two cases.<br />
z<br />
z<br />
y<br />
y<br />
tilt axis<br />
x<br />
x<br />
Figure 4.4: Tilting laser scanner moves the laser scan from the xy-plane to a oblique plane.<br />
Main challenges in this use-case:<br />
• Publish transformation continuously: The transformation has to be published continuously<br />
to all interested components.<br />
• Low latency: The transformation information should be delivered quickly to the interested<br />
components, so that they can do their calculations.<br />
• High synchronicity: In the case of the tilting laser scanner, the moment when the laser scan<br />
and the pose of the tilt unit are captured, should be nearly the same. The amount of time<br />
between the point when the laser scan and the point when the tilt unit pose is captured<br />
influences the quality of the transformation.














