

PDF 1.938kB
PDF 1.938kB
PDF 1.938kB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.2. TRANSFORMATIONS 11<br />
This translation can be written in matrix form [17, p.335] as<br />
P ′ = P + T<br />
where<br />
[ ] 2.5<br />
T =<br />
1<br />
[ ]<br />
So P ′ 2.5<br />
= P +<br />
1<br />
where<br />
P = original point-set<br />
P ′ = translated point-set<br />
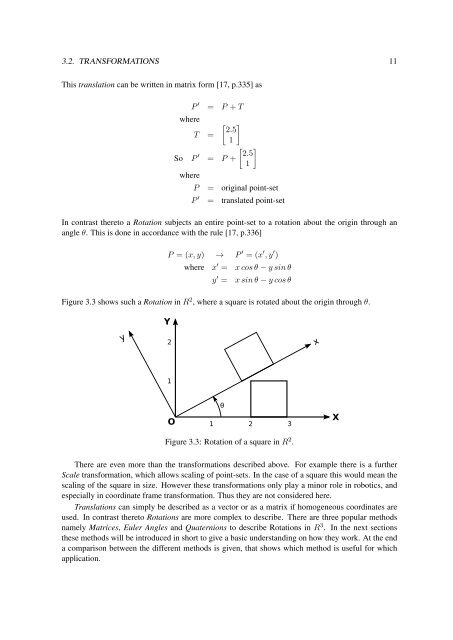
In contrast thereto a Rotation subjects an entire point-set to a rotation about the origin through an<br />
angle θ. This is done in accordance with the rule [17, p.336]<br />
P = (x, y) → P ′ = (x ′ , y ′ )<br />
where x ′ = x cos θ − y sin θ<br />
y ′ =<br />
x sin θ − y cos θ<br />
Figure 3.3 shows such a Rotation in R 2 , where a square is rotated about the origin through θ.<br />
Y<br />
y<br />
2<br />
x<br />
1<br />
O<br />
θ<br />
1 2 3<br />
X<br />
Figure 3.3: Rotation of a square in R 2 .<br />
There are even more than the transformations described above. For example there is a further<br />
Scale transformation, which allows scaling of point-sets. In the case of a square this would mean the<br />
scaling of the square in size. However these transformations only play a minor role in robotics, and<br />
especially in coordinate frame transformation. Thus they are not considered here.<br />
Translations can simply be described as a vector or as a matrix if homogeneous coordinates are<br />
used. In contrast thereto Rotations are more complex to describe. There are three popular methods<br />
namely Matrices, Euler Angles and Quaternions to describe Rotations in R 3 . In the next sections<br />
these methods will be introduced in short to give a basic understanding on how they work. At the end<br />
a comparison between the different methods is given, that shows which method is useful for which<br />
application.














