

Controller
Controller
Controller

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Controller</strong> -<br />
Integrated Type<br />
Slider<br />
Type<br />
Rod<br />
Type<br />
Arm / Flat<br />
Type<br />
Gripper /<br />
Rotary Type<br />
Cleanroom<br />
Type<br />
Splash<br />
Proof Type<br />
<strong>Controller</strong><br />
<strong>Controller</strong><br />
Models<br />
Gateway<br />
unit<br />
PSEL SCON ACON PCON ERC2 PS-24<br />
XSEL SSEL ASEL<br />
ACON <strong>Controller</strong><br />
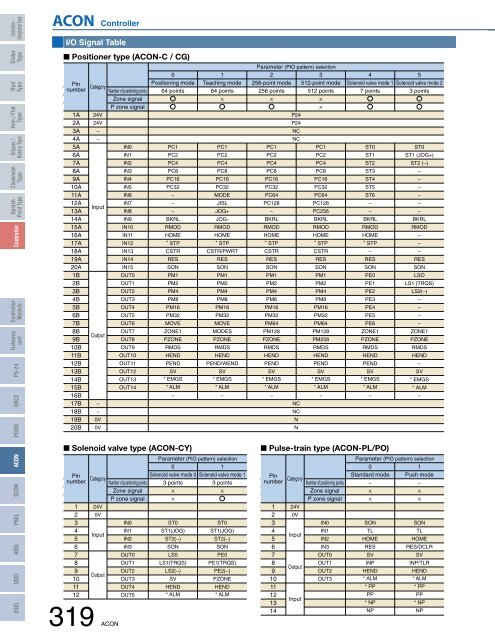
I/O Signal Table<br />
n Positioner type (ACON-C / CG)<br />
Pin<br />
number<br />
1A<br />
2A<br />
3A<br />
4A<br />
5A<br />
6A<br />
7A<br />
8A<br />
9A<br />
10A<br />
11A<br />
12A<br />
13A<br />
14A<br />
15A<br />
16A<br />
17A<br />
18A<br />
19A<br />
20A<br />
1B<br />
2B<br />
3B<br />
4B<br />
5B<br />
6B<br />
7B<br />
8B<br />
9B<br />
10B<br />
11B<br />
12B<br />
13B<br />
14B<br />
15B<br />
16B<br />
17B<br />
18B<br />
19B<br />
20B<br />
( 注 ) 上 記 信 号 名 の( )の 中 は、 原 点 復 帰 前 の 機 能 となります。<br />
n Solenoid valve type (ACON-CY)<br />
Pin<br />
number<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
Category<br />
24V<br />
24V<br />
319 ACON<br />
−<br />
−<br />
Input<br />
Output<br />
−<br />
−<br />
0V<br />
0V<br />
Category<br />
24V<br />
0V<br />
Input<br />
Output<br />
Number of positioning points<br />
Zone signal<br />
P zone signal<br />
IN0<br />
IN1<br />
IN2<br />
IN3<br />
IN4<br />
IN5<br />
IN6<br />
IN7<br />
IN8<br />
IN9<br />
IN10<br />
IN11<br />
IN12<br />
IN13<br />
IN14<br />
IN15<br />
OUT0<br />
OUT1<br />
OUT2<br />
OUT3<br />
OUT4<br />
OUT5<br />
OUT6<br />
OUT7<br />
OUT8<br />
OUT9<br />
OUT10<br />
OUT11<br />
OUT12<br />
OUT13<br />
OUT14<br />
Number of positioning points<br />
Zone signal<br />
P zone signal<br />
IN0<br />
IN1<br />
IN2<br />
IN3<br />
OUT0<br />
OUT1<br />
OUT2<br />
OUT3<br />
OUT4<br />
OUT5<br />
0<br />
Positioning mode<br />
64 points<br />
PC1<br />
PC2<br />
PC4<br />
PC8<br />
PC16<br />
PC32<br />
−<br />
−<br />
−<br />
BKRL<br />
RMOD<br />
HOME<br />
* STP<br />
CSTR<br />
RES<br />
SON<br />
PM1<br />
PM2<br />
PM4<br />
PM8<br />
PM16<br />
PM32<br />
MOVE<br />
ZONE1<br />
PZONE<br />
RMDS<br />
HEND<br />
PEND<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
Parameter (PIO pattern) selection<br />
0<br />
Solenoid valve mode 0<br />
3 points<br />
x<br />
x<br />
ST0<br />
ST1(JOG)<br />
ST2(−)<br />
SON<br />
LS0<br />
LS1(TRQS)<br />
LS2(−)<br />
SV<br />
HEND<br />
* ALM<br />
1<br />
Teaching mode<br />
64 points<br />
x<br />
PC1<br />
PC2<br />
PC4<br />
PC8<br />
PC16<br />
PC32<br />
MODE<br />
JISL<br />
JOG+<br />
JOG-<br />
RMOD<br />
HOME<br />
* STP<br />
CSTR/PWRT<br />
RES<br />
SON<br />
PM1<br />
PM2<br />
PM4<br />
PM8<br />
PM16<br />
PM32<br />
MOVE<br />
MODES<br />
PZONE<br />
RMDS<br />
HEND<br />
PEND/WEND<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
1<br />
Solenoid valve mode 1<br />
3 points<br />
x<br />
ST0<br />
ST1(JOG)<br />
ST2(−)<br />
SON<br />
PE0<br />
PE1(TRQS)<br />
PE2(−)<br />
PZONE<br />
HEND<br />
* ALM<br />
( 注 ) 上 記 信 号 名 の( )の 中 は、 原 点 復 帰 前 の 機 能 となります。<br />
Parameter (PIO pattern) selection<br />
2<br />
256-point mode<br />
256 points<br />
x<br />
PC1<br />
PC2<br />
PC4<br />
PC8<br />
PC16<br />
PC32<br />
PC64<br />
PC128<br />
−<br />
BKRL<br />
RMOD<br />
HOME<br />
* STP<br />
CSTR<br />
RES<br />
SON<br />
PM1<br />
PM2<br />
PM4<br />
PM8<br />
PM16<br />
PM32<br />
PM64<br />
PM128<br />
PZONE<br />
RMDS<br />
HEND<br />
PEND<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
n Pulse-train type (ACON-PL/PO)<br />
Pin<br />
number<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
P24<br />
P24<br />
NC<br />
NC<br />
NC<br />
NC<br />
N<br />
N<br />
Category<br />
24V<br />
0V<br />
Input<br />
Output<br />
Input<br />
3<br />
512-point mode<br />
512 points<br />
x<br />
x<br />
PC1<br />
PC2<br />
PC4<br />
PC8<br />
PC16<br />
PC32<br />
PC64<br />
PC128<br />
PC256<br />
BKRL<br />
RMOD<br />
HOME<br />
* STP<br />
CSTR<br />
RES<br />
SON<br />
PM1<br />
PM2<br />
PM4<br />
PM8<br />
PM16<br />
PM32<br />
PM64<br />
PM128<br />
PM256<br />
RMDS<br />
HEND<br />
PEND<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
Number of positioning points<br />
Zone signal<br />
P zone signal<br />
IN0<br />
IN1<br />
IN2<br />
IN3<br />
OUT0<br />
OUT1<br />
OUT2<br />
OUT3<br />
4<br />
5<br />
Solenoid valve mode 1 Solenoid valve mode 2<br />
7 points<br />
3 points<br />
ST0<br />
ST1<br />
ST2<br />
ST3<br />
ST4<br />
ST5<br />
ST6<br />
−<br />
−<br />
BKRL<br />
RMOD<br />
HOME<br />
* STP<br />
−<br />
RES<br />
SON<br />
PE0<br />
PE1<br />
PE2<br />
PE3<br />
PE4<br />
PE5<br />
PE6<br />
ZONE1<br />
PZONE<br />
RMDS<br />
HEND<br />
PEND<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
Parameter (PIO pattern) selection<br />
0<br />
1<br />
Standard mode Push mode<br />
−<br />
x<br />
x<br />
SON<br />
TL<br />
HOME<br />
RES<br />
SV<br />
INP<br />
HEND<br />
* ALM<br />
* PP<br />
PP<br />
* NP<br />
NP<br />
ST0<br />
ST1 (JOG+)<br />
ST2 (–)<br />
−<br />
−<br />
−<br />
−<br />
−<br />
−<br />
BKRL<br />
RMOD<br />
−<br />
−<br />
−<br />
RES<br />
SON<br />
LSO<br />
LS1 (TRQS)<br />
LS2(–)<br />
−<br />
−<br />
−<br />
−<br />
ZONE1<br />
PZONE<br />
RMDS<br />
HEND<br />
−<br />
SV<br />
* EMGS<br />
* ALM<br />
−<br />
−<br />
x<br />
x<br />
SON<br />
TL<br />
HOME<br />
RES/DCLR<br />
SV<br />
INP/TLR<br />
HEND<br />
* ALM<br />
* PP<br />
PP<br />
* NP<br />
NP













