

John Stillwell - Naive Lie Theory.pdf - Index of
John Stillwell - Naive Lie Theory.pdf - Index of
John Stillwell - Naive Lie Theory.pdf - Index of

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
178 8 Topology<br />
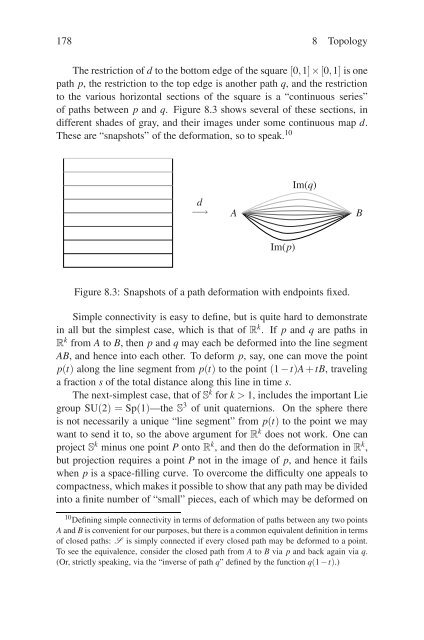
The restriction <strong>of</strong> d to the bottom edge <strong>of</strong> the square [0,1]×[0,1] is one<br />
path p, the restriction to the top edge is another path q, and the restriction<br />
to the various horizontal sections <strong>of</strong> the square is a “continuous series”<br />
<strong>of</strong> paths between p and q. Figure 8.3 shows several <strong>of</strong> these sections, in<br />
different shades <strong>of</strong> gray, and their images under some continuous map d.<br />
These are “snapshots” <strong>of</strong> the deformation, so to speak. 10<br />
−→ d<br />
A<br />
Im(q)<br />
B<br />
Im(p)<br />
Figure 8.3: Snapshots <strong>of</strong> a path deformation with endpoints fixed.<br />
Simple connectivity is easy to define, but is quite hard to demonstrate<br />
in all but the simplest case, which is that <strong>of</strong> R k . If p and q are paths in<br />
R k from A to B, thenp and q may each be deformed into the line segment<br />
AB, and hence into each other. To deform p, say, one can move the point<br />
p(t) along the line segment from p(t) to the point (1 −t)A +tB, traveling<br />
a fraction s <strong>of</strong> the total distance along this line in time s.<br />
The next-simplest case, that <strong>of</strong> S k for k > 1, includes the important <strong>Lie</strong><br />
group SU(2) =Sp(1)—the S 3 <strong>of</strong> unit quaternions. On the sphere there<br />
is not necessarily a unique “line segment” from p(t) to the point we may<br />
want to send it to, so the above argument for R k does not work. One can<br />
project S k minus one point P onto R k , and then do the deformation in R k ,<br />
but projection requires a point P not in the image <strong>of</strong> p, and hence it fails<br />
when p is a space-filling curve. To overcome the difficulty one appeals to<br />
compactness, which makes it possible to show that any path may be divided<br />
into a finite number <strong>of</strong> “small” pieces, each <strong>of</strong> which may be deformed on<br />
10 Defining simple connectivity in terms <strong>of</strong> deformation <strong>of</strong> paths between any two points<br />
A and B is convenient for our purposes, but there is a common equivalent definition in terms<br />
<strong>of</strong> closed paths: S is simply connected if every closed path may be deformed to a point.<br />
To see the equivalence, consider the closed path from A to B via p and back again via q.<br />
(Or, strictly speaking, via the “inverse <strong>of</strong> path q” defined by the function q(1 −t).)














