VC1000 Focus Guide - ProLon
VC1000 Focus Guide - ProLon
VC1000 Focus Guide - ProLon

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
VAV Controller<br />
www.prolon.net<br />
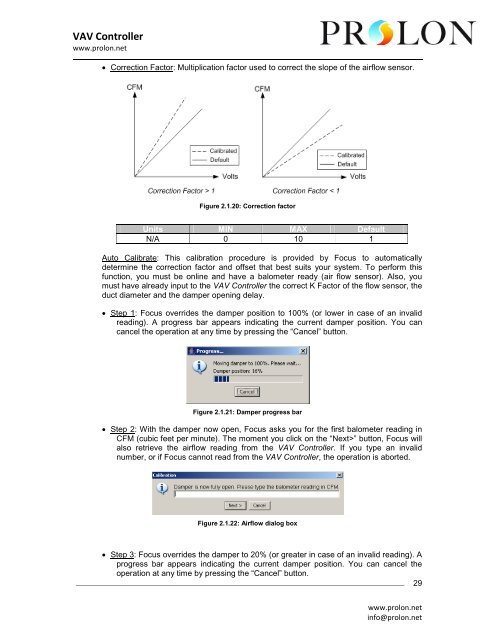
• Correction Factor: Multiplication factor used to correct the slope of the airflow sensor.<br />
Figure 2.1.20: Correction factor<br />
Units MIN MAX Default<br />
N/A 0 10 1<br />
Auto Calibrate: This calibration procedure is provided by <strong>Focus</strong> to automatically<br />
determine the correction factor and offset that best suits your system. To perform this<br />
function, you must be online and have a balometer ready (air flow sensor). Also, you<br />
must have already input to the VAV Controller the correct K Factor of the flow sensor, the<br />
duct diameter and the damper opening delay.<br />
• Step 1: <strong>Focus</strong> overrides the damper position to 100% (or lower in case of an invalid<br />
reading). A progress bar appears indicating the current damper position. You can<br />
cancel the operation at any time by pressing the “Cancel” button.<br />
Figure 2.1.21: Damper progress bar<br />
• Step 2: With the damper now open, <strong>Focus</strong> asks you for the first balometer reading in<br />
CFM (cubic feet per minute). The moment you click on the “Next>” button, <strong>Focus</strong> will<br />
also retrieve the airflow reading from the VAV Controller. If you type an invalid<br />
number, or if <strong>Focus</strong> cannot read from the VAV Controller, the operation is aborted.<br />
Figure 2.1.22: Airflow dialog box<br />
• Step 3: <strong>Focus</strong> overrides the damper to 20% (or greater in case of an invalid reading). A<br />
progress bar appears indicating the current damper position. You can cancel the<br />
operation at any time by pressing the “Cancel” button.<br />
29<br />
www.prolon.net<br />
info@prolon.net