Dunkermotoren Motors Gearboxes and Controllers
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
BG 75 | cont. 530 W, peak 1150 W<br />
BG 75, 220 - 530 W<br />
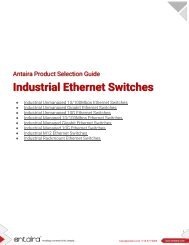
Dimensions in mm/ Maßzeichnung Dimensions in mm in mm / Maßzeichnung in mm<br />
rotatable/<br />
drehbar<br />
Woodruff Featherkey/<br />
/<br />
Passfeder<br />
A A 5x5x22<br />
Connector/<br />
Stecker<br />
M17, 4-pin (Power)<br />
Connector/Stecker<br />
M16, 8-pin<br />
45°<br />
current/Strom I (A)<br />
4x Ø 5.2<br />
current/Strom I (A)<br />
65 ±0.2<br />
+0.012<br />
Ø 14 k6 +0.001<br />
60 Ø (M6, 9+2tief )<br />
Permissible shaft-load /<br />
F R [N]<br />
Ø 56 (Ø 5.61, 13 tief)<br />
600<br />
75 ±0.5<br />
70<br />
7000<br />
Zulässige Wellenbelastung 70<br />
7000 500<br />
Ø 60 (Ø 5.61, 13 tief )<br />
J = f (M)<br />
ϑ R =20°C<br />
400<br />
ϑ R =20°C<br />
Radial-/ axialloads on the end of the shaft<br />
60 Version of 6000 flange for<br />
300<br />
∆ϑF A W =Fr/3 = for 100K L = 20.000 h 60<br />
6000<br />
J = f (M)<br />
∆ϑ W = 100K<br />
h10 Permissible shaft-load/<br />
F<br />
200<br />
R [N]<br />
600<br />
Motor L<br />
gearbox mounting/<br />
Radial-/ Axialkräfte am Wellenende Zulässige Wellenbelastung<br />
N 100= f (M)<br />
BG 75x25 115±0.5<br />
50 100 5000<br />
N = f (M)<br />
F 50 100 5000 0<br />
A =Fr/3 für L = 20.000 h 500<br />
Flanschversion für<br />
η<br />
BG 75x50 140±0.5<br />
h10 0 1000 2000 3000 4000 5000 6000<br />
[rpm]<br />
70η<br />
7000<br />
Radial-/ 70axialloads 7000 on the end of the shaft<br />
400<br />
BG 75x75 165±0.5<br />
Getriebemontage<br />
J = f (M)<br />
40 80 4000<br />
40<br />
ϑ R = 20°C<br />
80Radial-/ 4000Axialkräfte am Wellenende<br />
300<br />
60 6000<br />
Δϑ W = 100K 60 6000<br />
Pin assignment / Pinbelegung<br />
J = f (M)<br />
Δϑ W = 100K<br />
Motor L<br />
F 200<br />
A<br />
=Fr/3 für L h10<br />
= 20.000 h<br />
30 60 3000<br />
8-Pin50<br />
Signal 100 5000<br />
BG 75x25 115±0.5 4-Pin 30Power / 60 Signal 3000<br />
N = f (M)<br />
100<br />
N = f (M)<br />
50 100 5000<br />
η<br />
1 n.c. 5<br />
η<br />
HS1 BG 75x50 140±0.5 1 A (motor)<br />
Point of application load/ Angriffspunkt Belastung<br />
0<br />
20 40 2000<br />
2 40 n.c. 80 4000<br />
6 HS2 BG 75x75 165±0.5 15 mm<br />
20 40 2000 40from 80 flange/ 4000ab Flansch<br />
[rpm]<br />
2 B (motor)<br />
3 n.c. 7 HS3 3 C (motor)<br />
30 60 3000<br />
30 60 3000<br />
10 20 1000<br />
4 GND Hall 8 U Hall 4 10 Earth 20 1000<br />
20 40 2000<br />
20 40 2000<br />
M N<br />
M max<br />
M N<br />
M max<br />
0 0 0<br />
0 0 0<br />
0 40 80 10 120 1000 160 200 240 280 320 360 400<br />
10 20 0 1000100 200 300 400 500 600 700 800 900 1000<br />
Ncm<br />
In accordance with EN 60034<br />
Ncm<br />
M<br />
Characteristic 0 0 diagram N<br />
M M<br />
0<br />
/ Belastungskennlinien max<br />
N<br />
M max<br />
0 0 0<br />
0 40 80 120 160 200 240 280 320 360 400 0 Belastungskennlinien 100 200 300 gezeichnet 400 500 nach 600EN 60034 700 800 900 1000<br />
Ncm<br />
Ncm<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
efficiency/Wirkungsgrad η (%)<br />
efficiency/Wirkungsgrad η (%)<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
rated speed/Drehzahl n (rpm)<br />
rated speed/Drehzahl n (rpm)<br />
current/Strom I (A)<br />
current/Strom I (A)<br />
7000<br />
ϑ R =20°C<br />
70<br />
70<br />
7000<br />
7000<br />
70<br />
7000<br />
J J = f f (M)<br />
6000<br />
70 7000<br />
∆ϑ W = 100K ϑ ϑ 70 7000<br />
J = f (M)<br />
R = R 20°C<br />
= 20°C<br />
ϑ R = 20°C<br />
ϑ R = 20°C<br />
ϑ R = 20°C<br />
60<br />
60<br />
6000<br />
6000<br />
Δϑ Δϑ J f W W = 100K<br />
= 100K 60 6000<br />
J = f (M)<br />
Δϑ W = 100K<br />
60 J = f (M) 6000<br />
Δϑ W = 100K 60 6000<br />
J = f (M)<br />
Δϑ W = 100K<br />
5000<br />
N = f (M)<br />
J = f (M)<br />
N = f f (M)<br />
50<br />
50<br />
100<br />
100<br />
5000<br />
5000<br />
f N = f (M)<br />
50 100 5000N = f (M)<br />
N = f (M)<br />
50 100 5000<br />
η<br />
η<br />
N = f (M)<br />
50 100 5000<br />
η<br />
η<br />
η<br />
4000<br />
40<br />
40<br />
80<br />
80<br />
4000<br />
4000<br />
η<br />
40<br />
80<br />
4000<br />
40 80 4000<br />
40 80 4000<br />
10 20 1000<br />
M 0 0 0<br />
N<br />
M max 0 120 M 0 0 0<br />
N 240 360 480 600 M720 max 840 960 1080 1200<br />
0 120 240 360 480 600 720 840 960 1080 1200 Ncm<br />
Ncm<br />
3000<br />
30<br />
30<br />
60<br />
60<br />
3000<br />
3000<br />
30<br />
60<br />
3000<br />
30 60 3000<br />
30 60 3000<br />
20<br />
20<br />
40<br />
40<br />
2000<br />
2000<br />
20<br />
40<br />
2000<br />
20 40 2000<br />
20 40 2000<br />
2000<br />
10<br />
10<br />
20<br />
20<br />
1000<br />
1000<br />
10<br />
20<br />
1000<br />
10 20 1000<br />
M 10 20 1000<br />
1000<br />
M N<br />
M max<br />
M N<br />
M max<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
N<br />
M N<br />
M 0<br />
0<br />
0<br />
0 40 80 120 160 200 240 max<br />
280 320 360 400 0 100M N<br />
200 300 400 500M max<br />
600 700 800 900<br />
0 0 0 0 120 240 360 480 600 720 840 960 1080 1200 0 0 0<br />
M 0<br />
0<br />
N<br />
M40 80 120 160 200 240 280 320 360 400 Ncm<br />
Ncm<br />
0 100 200 300 400 500 600 700 800 900<br />
BG 75x25, max 24 V<br />
Ncm<br />
BG 75x50, 40 V<br />
0 120 240 360 480 600 720 840 960 1080 1200<br />
1000<br />
1000 Ncm<br />
Ncm<br />
70<br />
7000<br />
Ncm<br />
70 7000<br />
ϑ R = 20°C<br />
60<br />
6000<br />
ϑ Δϑ R = 20°C<br />
W = 100K<br />
60 6000<br />
J J = f f (M)<br />
Δϑ W = 100K<br />
50<br />
100<br />
5000<br />
N = f f (M)<br />
J = f (M)<br />
50 100 5000<br />
N = f (M)<br />
η<br />
40<br />
80<br />
4000<br />
η<br />
40 80 4000<br />
30<br />
60<br />
3000<br />
BG 75x50, 40V<br />
30 60 3000<br />
20<br />
40<br />
2000<br />
20 40 2000<br />
10<br />
20<br />
1000<br />
BG 75x75, 40 V<br />
current/Strom I (A)<br />
current/Strom I (A)<br />
I (A)<br />
current/Strom I (A)<br />
I (A)<br />
efficiency/Wirkungsgrad η (%)<br />
efficiency/Wirkungsgrad η (%)<br />
efficiency/Wirkungsgrad η (%)<br />
η (%)<br />
efficiency/Wirkungsgrad η (%)<br />
η (%)<br />
rated speed/Drehzahl n (rpm)<br />
rated speed/Drehzahl n (rpm)<br />
rated rated speed/Drehzahl n (rpm)<br />
n (rpm)<br />
rated rated speed/Drehzahl n (rpm)<br />
n (rpm)<br />
A<br />
Ø 32 -0.05<br />
45 Ø (M5, 9+2tief )<br />
56 Ø (M6, 9+2tief )<br />
3<br />
efficiency/Wirkungsgrad η (%)<br />
L<br />
rated speed/Drehzahl n (rpm)<br />
current/Strom I (A)<br />
current/Strom I (A)<br />
I (A)<br />
efficiency/Wirkungsgrad η (%)<br />
efficiency/Wirkungsgrad η (%)<br />
η (%)<br />
rated speed/Drehzahl n (rpm)<br />
rated rated speed/Drehzahl n (rpm)<br />
n (rpm)<br />
3<br />
30 ±1<br />
Centring/<br />
Zentrierung<br />
DM4 DIN33 2<br />
B<br />
Ø 32 -0.05<br />
Ø 45 (Ø 4.66, 13 tief)<br />
0 1000 2000 3000 4000 5000 6000<br />
Characteristic diagram/ Belastungskennlinien In accordance with/ Belastungskennlinien gezeichnet nach EN 60034<br />
■ Continuous operation/ Dauerbetrieb ■ Cyclical operation/ Zykl. Betrieb — Current torque/ Strom-Drehmoment — Speed torque/ Drehzahl-Drehmoment — Efficiency/ Effizienz<br />
BG 75x25, 24V<br />
M max<br />
ϑ R = 20°C<br />
BG motors<br />
59<br />
BG 75x75, 40V<br />
■ Preferred series/ Vorzugsreihe ■ St<strong>and</strong>ard product/ St<strong>and</strong>ardprodukt ■ On request/ auf Anfrage See notes page 8/ Hinweise siehe S. 8<br />
Visit www.dunkermotoren.com for further product information/ Besuchen Sie www.dunkermotoren.de für weitere Produktinformationen | 81