CAPÍTULO 8. <strong>INTRODUCCION</strong> A <strong>LA</strong> <strong>TEORIA</strong> <strong>DE</strong> <strong>ESTABILIDAD</strong>, JAIME ESCOBAR A.como y = B 1x A 1, entonces ambas semirrectas entran a (0, 0) con pendiente B 12). Si C 1 = 0, entoncesA 1.x = C 2 A 2 e m 2t ,y = C 2 B 2 e m 2t(8.23)Similarmente (8.23) representan dos semirrectas de la recta A 2 y = B 2 xcon pendiente B 2A 2, las cuales tienden a (0, 0) cuando t → ∞ y entran a él conpendiente B 2A 2.3). Si C 1 ≠ 0 y C 2 ≠ 0, entonces (8.20) y (8.21) representa trayectoriascurvas; como m 1 < 0 y m 2 < 0, entonces estas trayectorias tienden a (0, 0)cuando t → ∞, además, comoym 1 − m 2 < 0yx = C 1B 1 e m1t + C 2 B 2 e m 2t C 1 B 1C 1 A 1 e m 1t+ C 2 A 2 e = C 2e (m 1−m 2 ) t + B 2m 2t C 1 A 1C 2e (m 1−m 2 ) t+ A 2entonces, y → B 2x A 2cuando t → ∞, así que las trayectorias entran a (0, 0) conBpendiente 2A 2. De acuerdo a lo analizado (0, 0) es un nodo impropio y es,como lo veremos más adelante, asintóticamente estable (Ver figura 8.11).Si m 1 > m 2 > 0, la situación es exactamente la misma, excepto que lastrayectorias salen de (0, 0) cuando t → ∞, las flechas son al contrario delcaso anterior, (0, 0) es un nodo impropio inestable.CASO B: si las races m 1 y m 2 son reales, distintas y de signos opuestos,entonces (0, 0) es un punto de silla (ver figura 8.12).Demostración: supongamos que m 1 < 0 < m 2 .La solución general de (8.16) y (8.17) es de la forma (8.20) y (8.21), como enel CASO A se tienen cuatro trayectorias en forma de semirrectas opuestas;un par de semirrectas opuestas representadas por (8.22) con m 1 < 0, quetienden y entran a (0, 0) cuando t → ∞ y el otro par de semirrectas opuestasrepresentadas por (8.23) con m 2 > 0 las cuales tienden y entran al origen(0, 0) cuando t → −∞.Universidad de Antioquia, Depto. de MatematicasSi C 1 ≠ 0 y C 2 ≠ 0, la solución general (8.20) y (8.21) representa trayectoriascurvas, pero como m 1 < 0 < m 2 , entonces ninguna de ellas tiende a (0, 0)298
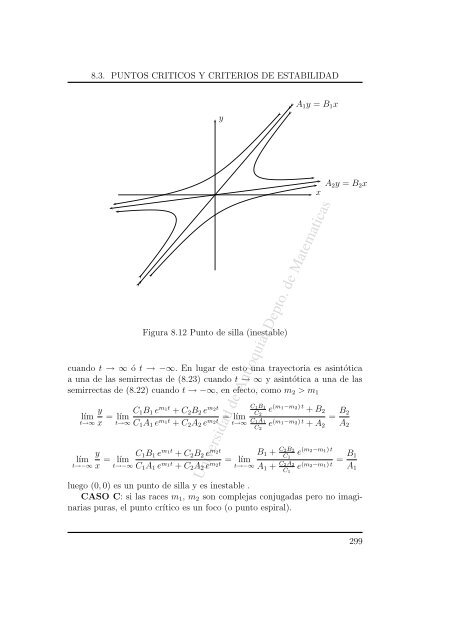
8.3. PUNTOS CRITICOS Y CRITERIOS <strong>DE</strong> <strong>ESTABILIDAD</strong>yA 1 y = B 1 xFigura 8.12 Punto de silla (inestable)Universidad de Antioquia, Depto. de MatematicasxA 2 y = B 2 xcuando t → ∞ ó t → −∞. En lugar de esto una trayectoria es asintóticaa una de las semirrectas de (8.23) cuando t → ∞ y asintótica a una de lassemirrectas de (8.22) cuando t → −∞, en efecto, como m 2 > m 1ylímt→∞ x = lím C 1 B 1 e m1t + C 2 B 2 e m 2tt→∞ C 1 A 1 e m 1t+ C 2 A 2 e = límm 2t t→∞C 1 B 1C 2e (m 1−m 2 ) t + B 2C 1 A 1C 2e (m 1−m 2 ) t= B 2+ A 2 A 2ylímt→−∞ x = lím C 1 B 1 e m1t + C 2 B 2 e m 2tt→−∞ C 1 A 1 e m 1t+ C 2 A 2 e = límB 1 + C 2B 2C 1e (m 2−m 1 ) tm 2t t→−∞ A 1 + C 2A 2C 1e = B 1(m 2−m 1 ) t A 1luego (0, 0) es un punto de silla y es inestable .CASO C: si las races m 1 , m 2 son complejas conjugadas pero no imaginariaspuras, el punto crítico es un foco (o punto espiral).299