Rapport d'activité - Institut des Systèmes Intelligents et de Robotique
Rapport d'activité - Institut des Systèmes Intelligents et de Robotique
Rapport d'activité - Institut des Systèmes Intelligents et de Robotique

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
une difficulté d’autant moins triviale que l’instrument<br />
est manipulé par un opérateur qui applique luimême<br />
<strong><strong>de</strong>s</strong> efforts sur le dispositif, efforts qu’il faut<br />
être capable <strong>de</strong> distinguer. Un agencement structurel<br />
original perm<strong>et</strong> <strong>de</strong> résoudre ce problème <strong>de</strong><br />
la mesure <strong><strong>de</strong>s</strong> efforts distaux par un capteur en<br />
«base »fixé à la poignée, (2011ACTI2338).<br />
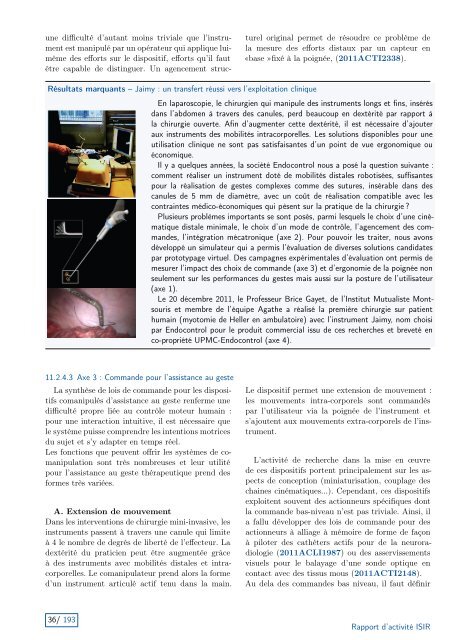
Résultats marquants – Jaimy : un transfert réussi vers l’exploitation clinique<br />
En laparoscopie, le chirurgien qui manipule <strong><strong>de</strong>s</strong> instruments longs <strong>et</strong> fins, insérés<br />
dans l’abdomen à travers <strong><strong>de</strong>s</strong> canules, perd beaucoup en <strong>de</strong>xtérité par rapport à<br />
la chirurgie ouverte. Afin d’augmenter c<strong>et</strong>te <strong>de</strong>xtérité, il est nécessaire d’ajouter<br />
aux instruments <strong><strong>de</strong>s</strong> mobilités intracorporelles. Les solutions disponibles pour une<br />
utilisation clinique ne sont pas satisfaisantes d’un point <strong>de</strong> vue ergonomique ou<br />
économique.<br />
Il y a quelques années, la société Endocontrol nous a posé la question suivante :<br />
comment réaliser un instrument doté <strong>de</strong> mobilités distales robotisées, suffisantes<br />
pour la réalisation <strong>de</strong> gestes complexes comme <strong><strong>de</strong>s</strong> sutures, insérable dans <strong><strong>de</strong>s</strong><br />
canules <strong>de</strong> 5 mm <strong>de</strong> diamètre, avec un coût <strong>de</strong> réalisation compatible avec les<br />
contraintes médico-économiques qui pèsent sur la pratique <strong>de</strong> la chirurgie ?<br />
Plusieurs problèmes importants se sont posés, parmi lesquels le choix d’une cinématique<br />
distale minimale, le choix d’un mo<strong>de</strong> <strong>de</strong> contrôle, l’agencement <strong><strong>de</strong>s</strong> comman<strong><strong>de</strong>s</strong>,<br />
l’intégration mécatronique (axe 2). Pour pouvoir les traiter, nous avons<br />
développé un simulateur qui a permis l’évaluation <strong>de</strong> diverses solutions candidates<br />
par prototypage virtuel. Des campagnes expérimentales d’évaluation ont permis <strong>de</strong><br />
mesurer l’impact <strong><strong>de</strong>s</strong> choix <strong>de</strong> comman<strong>de</strong> (axe 3) <strong>et</strong> d’ergonomie <strong>de</strong> la poignée non<br />
seulement sur les performances du gestes mais aussi sur la posture <strong>de</strong> l’utilisateur<br />
(axe 1).<br />
Le 20 décembre 2011, le Professeur Brice Gay<strong>et</strong>, <strong>de</strong> l’<strong>Institut</strong> Mutualiste Montsouris<br />
<strong>et</strong> membre <strong>de</strong> l’équipe Agathe a réalisé la première chirurgie sur patient<br />
humain (myotomie <strong>de</strong> Heller en ambulatoire) avec l’instrument Jaimy, nom choisi<br />
par Endocontrol pour le produit commercial issu <strong>de</strong> ces recherches <strong>et</strong> brev<strong>et</strong>é en<br />
co-propriété UPMC-Endocontrol (axe 4).<br />
11.2.4.3 Axe 3 : Comman<strong>de</strong> pour l’assistance au geste<br />
La synthèse <strong>de</strong> lois <strong>de</strong> comman<strong>de</strong> pour les dispositifs<br />
comanipulés d’assistance au geste renferme une<br />
difficulté propre liée au contrôle moteur humain :<br />
pour une interaction intuitive, il est nécessaire que<br />
le système puisse comprendre les intentions motrices<br />
du suj<strong>et</strong> <strong>et</strong> s’y adapter en temps réel.<br />
Les fonctions que peuvent offrir les systèmes <strong>de</strong> comanipulation<br />
sont très nombreuses <strong>et</strong> leur utilité<br />
pour l’assistance au geste thérapeutique prend <strong><strong>de</strong>s</strong><br />
formes très variées.<br />
A. Extension <strong>de</strong> mouvement<br />
Dans les interventions <strong>de</strong> chirurgie mini-invasive, les<br />
instruments passent à travers une canule qui limite<br />
à 4 le nombre <strong>de</strong> <strong>de</strong>grés <strong>de</strong> liberté <strong>de</strong> l’effecteur. La<br />
<strong>de</strong>xtérité du praticien peut être augmentée grâce<br />
à <strong><strong>de</strong>s</strong> instruments avec mobilités distales <strong>et</strong> intracorporelles.<br />
Le comanipulateur prend alors la forme<br />
d’un instrument articulé actif tenu dans la main.<br />
Le dispositif perm<strong>et</strong> une extension <strong>de</strong> mouvement :<br />
les mouvements intra-corporels sont commandés<br />
par l’utilisateur via la poignée <strong>de</strong> l’instrument <strong>et</strong><br />
s’ajoutent aux mouvements extra-corporels <strong>de</strong> l’instrument.<br />
L’activité <strong>de</strong> recherche dans la mise en œuvre<br />
<strong>de</strong> ces dispositifs portent principalement sur les aspects<br />
<strong>de</strong> conception (miniaturisation, couplage <strong><strong>de</strong>s</strong><br />
chaines cinématiques...). Cependant, ces dispositifs<br />
exploitent souvent <strong><strong>de</strong>s</strong> actionneurs spécifiques dont<br />
la comman<strong>de</strong> bas-niveau n’est pas triviale. Ainsi, il<br />
a fallu développer <strong><strong>de</strong>s</strong> lois <strong>de</strong> comman<strong>de</strong> pour <strong><strong>de</strong>s</strong><br />
actionneurs à alliage à mémoire <strong>de</strong> forme <strong>de</strong> façon<br />
à piloter <strong><strong>de</strong>s</strong> cathéters actifs pour <strong>de</strong> la neuroradiologie<br />
(2011ACLI1987) ou <strong><strong>de</strong>s</strong> asservissements<br />
visuels pour le balayage d’une son<strong>de</strong> optique en<br />
contact avec <strong><strong>de</strong>s</strong> tissus mous (2011ACTI2148).<br />
Au <strong>de</strong>la <strong><strong>de</strong>s</strong> comman<strong><strong>de</strong>s</strong> bas niveau, il faut définir<br />
36/ 193<br />
<strong>Rapport</strong> d’activité ISIR

![Lingot-12-10-2012-ED.ppt [Mode de compatibilité] - L'UTES](https://img.yumpu.com/50141784/1/190x253/lingot-12-10-2012-edppt-mode-de-compatibilite-lutes.jpg?quality=85)